You might also like
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Predictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsDocument6 pagesPredictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsjimylihNo ratings yet
- A Common-Mode Voltage Reduction Strategy For ADocument6 pagesA Common-Mode Voltage Reduction Strategy For Amalini72No ratings yet
- New Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesDocument13 pagesNew Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesKhalid HarounNo ratings yet
- Control of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceDocument8 pagesControl of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceAnand KumarNo ratings yet
- Dynamic Model and Simulation of Doubly Feed Induction: Generator Wind TurbineDocument5 pagesDynamic Model and Simulation of Doubly Feed Induction: Generator Wind TurbineSandeepKumarNo ratings yet
- Real-time digital simulation of offshore wind farm connectionsDocument7 pagesReal-time digital simulation of offshore wind farm connectionspreeti200726No ratings yet
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- Stability Enhancement in HVDC System With STATCOM: Chan-Ki Kim, Jin-Young Kim, Sung-Doo Lee, Eung-Bo SimDocument10 pagesStability Enhancement in HVDC System With STATCOM: Chan-Ki Kim, Jin-Young Kim, Sung-Doo Lee, Eung-Bo Simbaskaranjay5502No ratings yet
- A Novel Modeling and Control Method For Three-Phase ConvertersDocument6 pagesA Novel Modeling and Control Method For Three-Phase Convertersdhirajbharat20No ratings yet
- 4 Gaiceanu2014Document6 pages4 Gaiceanu2014HernandaBudiSantosoNo ratings yet
- Conference-201310-Kerim Colak-Dual Closed Loop Control of LLC Resonant Converter For EV Battery ChargerDocument5 pagesConference-201310-Kerim Colak-Dual Closed Loop Control of LLC Resonant Converter For EV Battery ChargerTocean DuongNo ratings yet
- Simulation of VSC Based HVDC Transmission System For The IntegratDocument5 pagesSimulation of VSC Based HVDC Transmission System For The IntegratManideep AdepuNo ratings yet
- Optimal PDFDocument6 pagesOptimal PDFjalilemadiNo ratings yet
- EEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCDocument6 pagesEEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCShruthi SaNo ratings yet
- An Electromagnetic Transient Simulation Model ForDocument4 pagesAn Electromagnetic Transient Simulation Model ForMohit Kumar ChowdaryNo ratings yet
- Simulation Current Controlled: Converter-InverterDocument5 pagesSimulation Current Controlled: Converter-InverterVivek VickyNo ratings yet
- Inverter Distributed: Controller Generation SystemsDocument7 pagesInverter Distributed: Controller Generation SystemsJohnNo ratings yet
- Doubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemDocument5 pagesDoubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemB Vijay VihariNo ratings yet
- Actual Wind EnergyDocument11 pagesActual Wind EnergyAbhishek V DeshpandeNo ratings yet
- Low Voltage Ride ThroughDocument6 pagesLow Voltage Ride ThroughMona ValikhaniNo ratings yet
- Inverter Lifetime PhotovoltaicDocument6 pagesInverter Lifetime Photovoltaicescuadrian9043No ratings yet
- 5.modeling of An Electric Vehicle Charging StationDocument6 pages5.modeling of An Electric Vehicle Charging Stationpeng100% (2)
- DC Power Generation Using Interior Permanent-Magnet MachinesDocument6 pagesDC Power Generation Using Interior Permanent-Magnet MachinesHosein AshourianNo ratings yet
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document11 pagesIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationNo ratings yet
- Matrix Converter PhD Thesis OverviewDocument15 pagesMatrix Converter PhD Thesis OverviewAnonymous EnggrUsmNo ratings yet
- Cage RotorDocument6 pagesCage Rotordebasis250No ratings yet
- 0912 F 50 DC 9 e 96 Ad 0 BD 000000Document4 pages0912 F 50 DC 9 e 96 Ad 0 BD 000000Pradyumna Kumar Behera100% (1)
- 7 PDFDocument9 pages7 PDFMaroju Santosh KiranNo ratings yet
- Modelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesDocument7 pagesModelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesskrtamilNo ratings yet
- Power Quality of Adjustable Speed DriveDocument5 pagesPower Quality of Adjustable Speed DriveAyong HiendroNo ratings yet
- Speed Control of DC Motor by Armature Resistance ControlDocument8 pagesSpeed Control of DC Motor by Armature Resistance ControlKosigar ChelladoraiNo ratings yet
- Zero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellsDocument8 pagesZero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellssghfqweNo ratings yet
- 2 Ares - 1502.00215ggDocument6 pages2 Ares - 1502.00215ggMatheus MaiaNo ratings yet
- DocumentationDocument84 pagesDocumentationKranthi KumarNo ratings yet
- Modelling and Analysis of Custom Power Devices For Improve Power QualityDocument6 pagesModelling and Analysis of Custom Power Devices For Improve Power Qualitytaner56No ratings yet
- Tugas 6 Kendali Mesin Listrik Industri - Aulia Silfani - 20130072Document8 pagesTugas 6 Kendali Mesin Listrik Industri - Aulia Silfani - 20130072Aulia SilfaniNo ratings yet
- Wind TurbineDocument5 pagesWind TurbineAnthony WellsNo ratings yet
- IgbtDocument7 pagesIgbtelvergonzalez1No ratings yet
- 05984362Document6 pages05984362muralimallikaNo ratings yet
- Harmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesDocument8 pagesHarmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesijcctsNo ratings yet
- Chapter-1 Introduction: 1.1 Power ElectronicsDocument8 pagesChapter-1 Introduction: 1.1 Power ElectronicsSatya SahityasekharNo ratings yet
- InTech-Comparative Analysis of Dfig Based Wind Farms Control Mode On Long Term Voltage StabilityDocument22 pagesInTech-Comparative Analysis of Dfig Based Wind Farms Control Mode On Long Term Voltage Stabilityhardcore85No ratings yet
- Stand Alone Self ExcitedDocument6 pagesStand Alone Self ExcitedSamundra GurungNo ratings yet
- 125 130 PDFDocument6 pages125 130 PDFJubin JainNo ratings yet
- A Novel Aeronautical Static Inverter With High Frequency Pulse DC Link PDFDocument8 pagesA Novel Aeronautical Static Inverter With High Frequency Pulse DC Link PDFqiwatingNo ratings yet
- Kart HiDocument11 pagesKart HiSivas SubramaniyanNo ratings yet
- Renewable Energy: Mohamed Abbes, Jamel Belhadj, Afef Ben Abdelghani BennaniDocument10 pagesRenewable Energy: Mohamed Abbes, Jamel Belhadj, Afef Ben Abdelghani BennaniIssam IssammNo ratings yet
- Modelling and Simulation: Wind Turbine GeneratorDocument7 pagesModelling and Simulation: Wind Turbine GeneratorEléctrico IngenieríaNo ratings yet
- Voltage Dip's Mitigation During PV-Grid-Connection Using STATCOMDocument7 pagesVoltage Dip's Mitigation During PV-Grid-Connection Using STATCOMMohammedSaeedNo ratings yet
- Dynamic Coordination Strategies Between HVDC and STATCOM: Chan-Ki Kim, Vijay Sood, and Seok-Jin LeeDocument11 pagesDynamic Coordination Strategies Between HVDC and STATCOM: Chan-Ki Kim, Vijay Sood, and Seok-Jin LeeArmand NicheuNo ratings yet
- 293 Kumar PDFDocument6 pages293 Kumar PDFMaulana JayalaksanaNo ratings yet
- Modeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time SimulationsDocument9 pagesModeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time Simulationsmlsawhney2996No ratings yet
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocument11 pagesDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaNo ratings yet
- Modeling and Control of an Advanced Static Var Compensator Using Three-Level InverterDocument6 pagesModeling and Control of an Advanced Static Var Compensator Using Three-Level InverterRaviraj KumbharNo ratings yet
- 7 PDFDocument9 pages7 PDFRevuNo ratings yet
- Back-Stepping Control of Off-Grid PV InverterDocument6 pagesBack-Stepping Control of Off-Grid PV InverterMartino Ojwok AjangnayNo ratings yet
- Power Control For A Doubly Fed Induction Generator: Authors Ali Boukhriss, Tamou Nasser, Ahmed EssadkiDocument5 pagesPower Control For A Doubly Fed Induction Generator: Authors Ali Boukhriss, Tamou Nasser, Ahmed EssadkiAbab AliNo ratings yet
- Artigo CJR IECON2002Document6 pagesArtigo CJR IECON2002AiflRopetNo ratings yet
- Mohd. Hasan Ali, PH.DDocument17 pagesMohd. Hasan Ali, PH.DGomaa Haroun AliNo ratings yet
- 18-M. S. AspalliDocument7 pages18-M. S. AspalliGomaa Haroun AliNo ratings yet
- LaTeX Mathematical SymbolsDocument4 pagesLaTeX Mathematical Symbolsjfreyre100% (9)
- A New Method For Voltage and Frequency Control of Stand-Alone Self-Excited Induction Generator Using PWM Converter With Variable DC Link VoltageDocument6 pagesA New Method For Voltage and Frequency Control of Stand-Alone Self-Excited Induction Generator Using PWM Converter With Variable DC Link VoltageGomaa Haroun AliNo ratings yet
- Obiozor Clarence NwabunwanneDocument129 pagesObiozor Clarence NwabunwanneGomaa Haroun AliNo ratings yet
- Microcontroller Solar Tracking SystemDocument3 pagesMicrocontroller Solar Tracking SystemTarun Kumar ReddyNo ratings yet
- Mir20 1 2015Document1 pageMir20 1 2015hamadaNo ratings yet
- BJT As An Amplifier: Biasing and Small Signal Model: ECE60L Lecture Notes, Spring 2002Document15 pagesBJT As An Amplifier: Biasing and Small Signal Model: ECE60L Lecture Notes, Spring 2002anon020202100% (1)
- Kathrein 732 690Document2 pagesKathrein 732 690PavelKuzovkinNo ratings yet
- High Voltage - WikipediaDocument7 pagesHigh Voltage - WikipediaMasudRanaNo ratings yet
- Chapter Two Part 1Document38 pagesChapter Two Part 1marNo ratings yet
- Continuous-Time Delta-Sigma A/D Converters For. High Speed ApplicationsDocument230 pagesContinuous-Time Delta-Sigma A/D Converters For. High Speed Applicationsreader_188No ratings yet
- Schneider Solar Inverter XC Series April 2012 - V2Document2 pagesSchneider Solar Inverter XC Series April 2012 - V2Vedansh ShrivastavaNo ratings yet
- Interwire 2019 - Presentation Light PDFDocument17 pagesInterwire 2019 - Presentation Light PDFBoris DardelNo ratings yet
- Analysis of Silicon Solar Cell Device PaDocument9 pagesAnalysis of Silicon Solar Cell Device PaHoucine NaimNo ratings yet
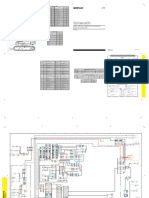
- 303C CR Mini Hydraulic Excavator Electrical System: Bxt1-UpDocument2 pages303C CR Mini Hydraulic Excavator Electrical System: Bxt1-UpVictor Rodrigo Cortes Yañez100% (1)
- Optical Communications (OC)Document22 pagesOptical Communications (OC)Bharat ChilamkuriNo ratings yet
- GET-7203 - Art of Protective RelayingDocument19 pagesGET-7203 - Art of Protective RelayingArnab BanerjeeNo ratings yet
- Automatic Pump ON - OFF Based On FireDocument5 pagesAutomatic Pump ON - OFF Based On Firesmartxdigital marketNo ratings yet
- Prepare An Electrical BOQDocument6 pagesPrepare An Electrical BOQMohammad YeasinNo ratings yet
- Physics - Gregg Kerr and Paul Ruth - IBID 2008Document588 pagesPhysics - Gregg Kerr and Paul Ruth - IBID 2008Ranjani M RNo ratings yet
- Khenissi 2020Document6 pagesKhenissi 2020Boutaina TalbiNo ratings yet
- Engineering Physics EMT NotesDocument10 pagesEngineering Physics EMT NotesVijay ReddyNo ratings yet
- Reactive Power CompensationDocument8 pagesReactive Power CompensationAnas ShaikhNo ratings yet
- Comprehensive Overview of Low Voltage Ride Through Methods of Grid Integrated Wind GeneratorDocument28 pagesComprehensive Overview of Low Voltage Ride Through Methods of Grid Integrated Wind GeneratorSubhadeep PaladhiNo ratings yet
- PID Controller - WikipediaDocument41 pagesPID Controller - WikipediaHaroon Mohamed MorshedNo ratings yet
- SvcField8050 C500 CF5001MANUALDocument428 pagesSvcField8050 C500 CF5001MANUALMarius ManNo ratings yet
- Mini Project Report-2Document26 pagesMini Project Report-2Remya Ramakrishnan0% (2)
- Balfour Stewart - The Conservation of Energy (1873)Document183 pagesBalfour Stewart - The Conservation of Energy (1873)momir6856No ratings yet
- Easa Module 4Document45 pagesEasa Module 4izwan_zack78% (9)
- Iec 60115-1-2008Document80 pagesIec 60115-1-2008amer100% (1)
- Programmable UJT (PUT)Document4 pagesProgrammable UJT (PUT)Mark Angielo TrillanaNo ratings yet
- Product Type Report: S.C. Halley Cables, S.R.LDocument4 pagesProduct Type Report: S.C. Halley Cables, S.R.LCristian FieraruNo ratings yet
- Selected Problems SolutionsDocument11 pagesSelected Problems SolutionsKatherine ButlerNo ratings yet
- Viewsonic VA2026W1Document79 pagesViewsonic VA2026W1Raul AlfaroNo ratings yet