You might also like
- Immersed-Boundary Method for Compressible FlowsDocument10 pagesImmersed-Boundary Method for Compressible FlowsamoscribdNo ratings yet
- Compressible Navier-Stokes Flow Solver with Scalar TransportDocument23 pagesCompressible Navier-Stokes Flow Solver with Scalar TransportHDYangNo ratings yet
- b009 PDFDocument7 pagesb009 PDFalagarg137691No ratings yet
- Finite-Volume Method Simulates Free-Surface FlowsDocument8 pagesFinite-Volume Method Simulates Free-Surface FlowsSandra PowersNo ratings yet
- Pipe Flow 03Document20 pagesPipe Flow 03Henry Reynolds DarcyNo ratings yet
- A Cell-Vertex Multigrid Method for the Navier-StokDocument42 pagesA Cell-Vertex Multigrid Method for the Navier-StokludokellypNo ratings yet
- Abgrall11 - Some Examples of High Order Simulations Parallel of Inviscid Flows On Unstructured and Hybrid Meshes by Residual Distribution SchemesDocument8 pagesAbgrall11 - Some Examples of High Order Simulations Parallel of Inviscid Flows On Unstructured and Hybrid Meshes by Residual Distribution SchemesAbhishekRaoNo ratings yet
- The Use of Supercomputers For The Variational Calculation of Ro-Vibrationally Excited States of Floppy MoleculesDocument12 pagesThe Use of Supercomputers For The Variational Calculation of Ro-Vibrationally Excited States of Floppy MoleculesTreaxmeANo ratings yet
- Discontinuous Galerkin Methods For Flow and Transport Problems in Porous MediaDocument6 pagesDiscontinuous Galerkin Methods For Flow and Transport Problems in Porous MediaRamesh JangalaNo ratings yet
- Journal of Computational Physics: Lajos Szalmás, Dimitris ValougeorgisDocument12 pagesJournal of Computational Physics: Lajos Szalmás, Dimitris ValougeorgisAsif HameedNo ratings yet
- DNS of Taylor-Green Vortex at Re=1600Document5 pagesDNS of Taylor-Green Vortex at Re=1600Manu ChakkingalNo ratings yet
- Annual Transactions of the Nordic Rheology Society: Peristaltic Flow of Non-Newtonian FluidsDocument8 pagesAnnual Transactions of the Nordic Rheology Society: Peristaltic Flow of Non-Newtonian FluidsMohamed YousufNo ratings yet
- A Finite-Difference Scheme For Three-Dimensional Incompressible Flows in Cylindrical CoordinatesDocument13 pagesA Finite-Difference Scheme For Three-Dimensional Incompressible Flows in Cylindrical CoordinatesGalyna RomanNo ratings yet
- DNS lowREDocument8 pagesDNS lowREPratzen HillNo ratings yet
- Creeping Flow in Two-Dimensional Network - 1982Document29 pagesCreeping Flow in Two-Dimensional Network - 1982Alireza Attari MNo ratings yet
- (1987) A Perturbation Solution For Compressible Viscous Channel FlowDocument18 pages(1987) A Perturbation Solution For Compressible Viscous Channel FlowJing-Wu DongNo ratings yet
- 18 Conference Article BSME ASME Paper1Document7 pages18 Conference Article BSME ASME Paper1Md Sayed Aktar RahmanNo ratings yet
- Desousa - FT - Multi Fluid Flow With Free Surface - 2004Document31 pagesDesousa - FT - Multi Fluid Flow With Free Surface - 2004Zohre AlinejadNo ratings yet
- Adaptive Simulations of Two-Phase Ow by Discontinuous Galerkin MethodsDocument16 pagesAdaptive Simulations of Two-Phase Ow by Discontinuous Galerkin MethodsJesse ClarkNo ratings yet
- Computational Aerodynamics: Name:Akhil Raj - Awale ROLL NO:17951A2105Document15 pagesComputational Aerodynamics: Name:Akhil Raj - Awale ROLL NO:17951A2105Jaikar Jaikar RahulNo ratings yet
- Almost Sharp Front EvolutionDocument4 pagesAlmost Sharp Front EvolutionNeil JethaniNo ratings yet
- Data On The Velocity Slip and Temperature Jump CoefficientsDocument7 pagesData On The Velocity Slip and Temperature Jump CoefficientsDiaul VikriNo ratings yet
- Numerical Calculation of Multidimensional Miscible DisplacementDocument13 pagesNumerical Calculation of Multidimensional Miscible DisplacementBahman MatouriNo ratings yet
- BF 02990228Document14 pagesBF 02990228Yasser AlrifaiNo ratings yet
- Entropy: Evaporation Boundary Conditions For The Linear R13 Equations Based On The Onsager TheoryDocument29 pagesEntropy: Evaporation Boundary Conditions For The Linear R13 Equations Based On The Onsager TheoryPudretexDNo ratings yet
- Spectral (Finite) Volume Method For Conservation Laws On Unstructured Grids IV - Extension To Two-Dimensional SystemsDocument26 pagesSpectral (Finite) Volume Method For Conservation Laws On Unstructured Grids IV - Extension To Two-Dimensional SystemsxebitNo ratings yet
- Implicitly Restarted Arnoldi Method for Computing EigenvaluesDocument33 pagesImplicitly Restarted Arnoldi Method for Computing EigenvaluesMaritza L M CapristanoNo ratings yet
- Kjs 33 Aliattia 15Document9 pagesKjs 33 Aliattia 15RoberticoZeaNo ratings yet
- Ducto CuadradoDocument7 pagesDucto CuadradoJosue RamiresNo ratings yet
- Numerical Simulation of Flow Around A Circular Cylinder at Moderate Reynolds NumbersDocument15 pagesNumerical Simulation of Flow Around A Circular Cylinder at Moderate Reynolds NumbersJohnnyNo ratings yet
- Numerical Simulation of Laminar Flow Past A Circular Cylinder - 1-s2.0-S0307904X08000243-MainDocument20 pagesNumerical Simulation of Laminar Flow Past A Circular Cylinder - 1-s2.0-S0307904X08000243-MainShanthan GuduruNo ratings yet
- Simulating Vortex Shedding at High Reynolds NumbersDocument6 pagesSimulating Vortex Shedding at High Reynolds NumbersDeniz ümit BayraktutarNo ratings yet
- New Indicators of ChaosDocument7 pagesNew Indicators of ChaosJesus Manuel Muñoz PachecoNo ratings yet
- Bielajew Salvat 2001Document12 pagesBielajew Salvat 2001jiar001No ratings yet
- Unsteadiness in Flow Over A Flat Plate at Angle-of-Attack at Low Reynolds NumbersDocument16 pagesUnsteadiness in Flow Over A Flat Plate at Angle-of-Attack at Low Reynolds NumbersHoward NettlesNo ratings yet
- Analytical Solution of A Spatially Variable Coe Cient Advection Di Usion Equation in Up To Three DimensionsDocument19 pagesAnalytical Solution of A Spatially Variable Coe Cient Advection Di Usion Equation in Up To Three DimensionsLuisReyesMolinaNo ratings yet
- Sciencedirect: Control-Volume Method For Extralarge Network Hydraulic AnalysisDocument9 pagesSciencedirect: Control-Volume Method For Extralarge Network Hydraulic AnalysisJy Ce RzNo ratings yet
- Cesenek11 - Simulation of Compressible Viscous Flow in Time-Dependent DomainsDocument12 pagesCesenek11 - Simulation of Compressible Viscous Flow in Time-Dependent DomainsPedro Tati BarrosNo ratings yet
- Daly Of: University California, Los Alamos Scientific Laboratory, Los Alamos, New MexicoDocument32 pagesDaly Of: University California, Los Alamos Scientific Laboratory, Los Alamos, New MexicobarnamalaNo ratings yet
- S. G. P. K.: Computers and B'luidsDocument18 pagesS. G. P. K.: Computers and B'luidscalculator1No ratings yet
- Lower-Upper Symmetric-Gauss-Seidel Method For The Euler and Navier-Stokes EquationsDocument2 pagesLower-Upper Symmetric-Gauss-Seidel Method For The Euler and Navier-Stokes EquationsJaeHeung GillNo ratings yet
- One-Dimensional Cellular Automata With Random Rules PDFDocument24 pagesOne-Dimensional Cellular Automata With Random Rules PDFPaula BrazueloNo ratings yet
- An Improved Reconstruction Method For Compressible Ows With Low Mach Number FeaturesDocument22 pagesAn Improved Reconstruction Method For Compressible Ows With Low Mach Number FeaturesgoldenthangamNo ratings yet
- Calculating SpectraDocument16 pagesCalculating Spectraziggie_lenzNo ratings yet
- France (1974)Document18 pagesFrance (1974)julianaNo ratings yet
- Vahl Davis BenchmarkDocument16 pagesVahl Davis BenchmarkAjith Kumar ArumughamNo ratings yet
- (2001) D3Q13 LBMDocument7 pages(2001) D3Q13 LBMGonçalo SilvaNo ratings yet
- Elhanafy - Modified Method of Characteristics For The Shallow Water EqDocument10 pagesElhanafy - Modified Method of Characteristics For The Shallow Water EqingjorgeveraNo ratings yet
- Hybrid RANS-LES Turbulence Models On Unstructured Grids: C. Eric Lynch and Marilyn J. SmithDocument14 pagesHybrid RANS-LES Turbulence Models On Unstructured Grids: C. Eric Lynch and Marilyn J. SmithAerospaceAngelNo ratings yet
- ms4 Fvreview PDFDocument6 pagesms4 Fvreview PDFBeen NdNo ratings yet
- Parallel Multigrid Finite Volume Computation of Three-Dimensional Thermal Convection - 98-1188Document29 pagesParallel Multigrid Finite Volume Computation of Three-Dimensional Thermal Convection - 98-1188Florin VladNo ratings yet
- Fully Coupled Six-Dimensional Calculations of The Water Dimer Vibration-Rotation-Tunneling States With A Split Wigner Pseudo Spectral ApproachDocument18 pagesFully Coupled Six-Dimensional Calculations of The Water Dimer Vibration-Rotation-Tunneling States With A Split Wigner Pseudo Spectral ApproachMddl2aNo ratings yet
- Forced Axial Flow Between Rotating Concentric Cylinders: CitationDocument14 pagesForced Axial Flow Between Rotating Concentric Cylinders: CitationPrabal AcharyaNo ratings yet
- ADMOS 2013 conference paper on fully coupled finite volume solverDocument12 pagesADMOS 2013 conference paper on fully coupled finite volume solverErnesto Delfino AguirreNo ratings yet
- A Solution For The Odd-Even Decoupling Problem in Pressure-Correction Algorithms For Variable Density OwsDocument21 pagesA Solution For The Odd-Even Decoupling Problem in Pressure-Correction Algorithms For Variable Density OwsErnesto Delfino AguirreNo ratings yet
- Layered Uid Model and Ow Simulation For Microchannels Using Electrical NetworksDocument13 pagesLayered Uid Model and Ow Simulation For Microchannels Using Electrical NetworksSta GarretNo ratings yet
- Linearized Pipe Ow To Reynolds NumberDocument22 pagesLinearized Pipe Ow To Reynolds NumberAlim SheikhNo ratings yet
- Circuit Resonances: Small ResistanceDocument8 pagesCircuit Resonances: Small ResistanceEpic WinNo ratings yet
- Discrete-Event Simulation of Fluid Stochastic Petri NetsDocument9 pagesDiscrete-Event Simulation of Fluid Stochastic Petri NetsssfofoNo ratings yet
- From The Surface of Mars To Your Living Room FloorDocument13 pagesFrom The Surface of Mars To Your Living Room FloordpnairNo ratings yet
- Balat An TramDocument1 pageBalat An TramdpnairNo ratings yet
- Indian Calendar Wi00sewerich BWDocument342 pagesIndian Calendar Wi00sewerich BWOstensibleNo ratings yet
- Laser Cut Model Plane 3d Puzzle DXF Free Download PDFDocument1 pageLaser Cut Model Plane 3d Puzzle DXF Free Download PDFdpnairNo ratings yet
- Quotation For NPNT Module U2.0Document2 pagesQuotation For NPNT Module U2.0dpnairNo ratings yet
- Data Polarity US NZDocument4 pagesData Polarity US NZdpnairNo ratings yet
- Boxplot ExplanationDocument2 pagesBoxplot ExplanationdpnairNo ratings yet
- Dynamic Imaging of The Fetal Heart Using Metric Optimized GatingDocument19 pagesDynamic Imaging of The Fetal Heart Using Metric Optimized GatingdpnairNo ratings yet
- Data Polarity US NZDocument4 pagesData Polarity US NZdpnairNo ratings yet
- Bed, Bath & Beyond Award for Women's EducationDocument6 pagesBed, Bath & Beyond Award for Women's EducationdpnairNo ratings yet
- Dynamic Imaging of The Fetal Heart Using Metric Optimized GatingDocument19 pagesDynamic Imaging of The Fetal Heart Using Metric Optimized GatingdpnairNo ratings yet
- COEX Clover Drone Kit SpecificationDocument1 pageCOEX Clover Drone Kit SpecificationdpnairNo ratings yet
- Layout InlineDocument62 pagesLayout InlinedpnairNo ratings yet
- Sripadasaptati Melpathur Narayana Bhattathiri MalayalamDocument37 pagesSripadasaptati Melpathur Narayana Bhattathiri Malayalamvineethgn0% (1)
- ATL Drone Module PDFDocument110 pagesATL Drone Module PDFसंकेत कलगुटकर100% (1)
- Ibg Jordan Inspection Report AnalysisDocument6 pagesIbg Jordan Inspection Report AnalysisdpnairNo ratings yet
- Sripadasaptati Melpathur Narayana Bhattathiri MalayalamDocument37 pagesSripadasaptati Melpathur Narayana Bhattathiri Malayalamvineethgn0% (1)
- Kerala Bus Ticket: Keep Safe Till End of JourneyDocument8 pagesKerala Bus Ticket: Keep Safe Till End of JourneydpnairNo ratings yet
- Cutting Section: Technichal Team'S S.O.PDocument5 pagesCutting Section: Technichal Team'S S.O.PdpnairNo ratings yet
- Introduction1 1 0Document2 pagesIntroduction1 1 0dpnairNo ratings yet
- Inline vs Conventional Layout ComparisonDocument8 pagesInline vs Conventional Layout ComparisondpnairNo ratings yet
- SWOT Business Planning Checklist for Your Company NameDocument1 pageSWOT Business Planning Checklist for Your Company NameDiogo MatosNo ratings yet
- Layout InlineDocument62 pagesLayout InlinedpnairNo ratings yet
- Way To Zero Defect: Prepared by VishnuDocument9 pagesWay To Zero Defect: Prepared by VishnudpnairNo ratings yet
- SOP1Document2 pagesSOP1dpnairNo ratings yet
- Edited CM ComparisonDocument1 pageEdited CM ComparisondpnairNo ratings yet
- Sewing Section: Technical/Production Team SopDocument4 pagesSewing Section: Technical/Production Team SopdpnairNo ratings yet
- CM Analysis: Ibg JordanDocument6 pagesCM Analysis: Ibg JordandpnairNo ratings yet
- Ibg Jordan Unit I-Daily Cost Report July'14Document1 pageIbg Jordan Unit I-Daily Cost Report July'14dpnairNo ratings yet
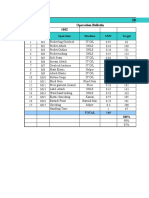
- Ibg Jordan Operation Bulletin Style #102: SL# Code Operation Machine SMV TargetDocument11 pagesIbg Jordan Operation Bulletin Style #102: SL# Code Operation Machine SMV TargetdpnairNo ratings yet
- CrashDocument13 pagesCrashBabs SiclesNo ratings yet
- Oracle DBA Interview Q&ADocument8 pagesOracle DBA Interview Q&Amanideep thatikondaNo ratings yet
- Datasheet para ICDocument9 pagesDatasheet para ICepalexNo ratings yet
- Ece4009 - Wireless and Mobile Communication Review 2 Group Members Slot 1. 2. 3. TitleDocument10 pagesEce4009 - Wireless and Mobile Communication Review 2 Group Members Slot 1. 2. 3. TitledwijaNo ratings yet
- UI5 Step by Step GuideDocument11 pagesUI5 Step by Step GuideChandraNo ratings yet
- Cardinal Scale 205 Weight Indicator Installation and Technical ManualDocument58 pagesCardinal Scale 205 Weight Indicator Installation and Technical ManualKennyGabrielNo ratings yet
- Supported - Settings - Trimble - RadiosDocument4 pagesSupported - Settings - Trimble - RadiosAlison CastroNo ratings yet
- Blaise 98 UK TotalDocument94 pagesBlaise 98 UK TotalangdrakeNo ratings yet
- Csec It Sba 2022 - SpreadsheetDocument6 pagesCsec It Sba 2022 - SpreadsheetJanicSmith100% (1)
- Atlantic Computers Group 3 Presentation SummaryDocument7 pagesAtlantic Computers Group 3 Presentation SummaryABHISHEK BANERJEENo ratings yet
- SSED - Solved Problems For Chapter 5Document7 pagesSSED - Solved Problems For Chapter 5MINH NGUYỄN THẾNo ratings yet
- 336-517-8972 Professional Summary:: Swetha ManoharanDocument3 pages336-517-8972 Professional Summary:: Swetha ManoharanVijay LS SolutionsNo ratings yet
- Computer Monitor: From Wikipedia, The Free EncyclopediaDocument4 pagesComputer Monitor: From Wikipedia, The Free EncyclopediaSock SackNo ratings yet
- CPPS LAB 15 SolutionsDocument11 pagesCPPS LAB 15 SolutionsJoyceNo ratings yet
- Delivers Simplicity and Sensitivity: Dedicated Chemiluminescence Imaging SystemDocument6 pagesDelivers Simplicity and Sensitivity: Dedicated Chemiluminescence Imaging SystemAhmet Selim ÇağinNo ratings yet
- CMOS Means Complementary MOS: NMOS and PMOS Working Together in A CircuitDocument8 pagesCMOS Means Complementary MOS: NMOS and PMOS Working Together in A Circuitsuresht196No ratings yet
- JSP 2 Struts Eclipse 3 DAO ANSI SQL DB and More With ExamplesDocument250 pagesJSP 2 Struts Eclipse 3 DAO ANSI SQL DB and More With Examplesapi-3696230No ratings yet
- KMP Algorithm - Find Patterns in Linear TimeDocument4 pagesKMP Algorithm - Find Patterns in Linear TimeGrama SilviuNo ratings yet
- MSI MS-953500aDocument1 pageMSI MS-953500aFERNANDO R. RNo ratings yet
- E360 BrosurDocument6 pagesE360 BrosurPutra DalimaNo ratings yet
- Ict - chs9 Lesson 1 - Basic Computer Configuration SetupDocument29 pagesIct - chs9 Lesson 1 - Basic Computer Configuration SetupOmengMagcalasNo ratings yet
- Chapter 3 Security Architecture PDFDocument34 pagesChapter 3 Security Architecture PDFdgeeklordNo ratings yet
- Sigcse 18Document6 pagesSigcse 18masterhacksNo ratings yet
- A Review of 2D &3D Image Steganography TechniquesDocument5 pagesA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCNo ratings yet
- CMDB AdminDocument140 pagesCMDB AdminFireball IndiaNo ratings yet
- Spotify RhythmDocument23 pagesSpotify Rhythmblahblahblah12233496100% (1)
- CTRPF AR Cheat Code DatabaseDocument180 pagesCTRPF AR Cheat Code DatabaseIndraSwacharyaNo ratings yet
- GSM ActixDocument64 pagesGSM ActixNenad100% (1)
- CCV User Manual 2013 10 03Document32 pagesCCV User Manual 2013 10 03corello52No ratings yet
- Data-Driven Insights Leader with 6+ Years ExperienceDocument3 pagesData-Driven Insights Leader with 6+ Years ExperienceAnil Kumar KNo ratings yet