You might also like
- 100 circuitos de shields para arduino (español)From Everand100 circuitos de shields para arduino (español)Rating: 3.5 out of 5 stars3.5/5 (3)
- Muros de ContenciónDocument71 pagesMuros de Contenciónluis diazNo ratings yet
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiFrom EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiRating: 5 out of 5 stars5/5 (1)
- Caracteristicas Del TransitoDocument5 pagesCaracteristicas Del Transitoeusoj243100% (4)
- Calculo Del Centro de CargaDocument29 pagesCalculo Del Centro de CargaHector Afre50% (10)
- Tema #2.0. - Diseño Por Carga Perpendicular Al PlanoDocument107 pagesTema #2.0. - Diseño Por Carga Perpendicular Al PlanoEnrique VigilNo ratings yet
- PWM Arduino: Guía completa de modulación por ancho de pulsoDocument11 pagesPWM Arduino: Guía completa de modulación por ancho de pulsoMauricio RdrNo ratings yet
- Calculo ErturkeDocument10 pagesCalculo ErturkeSofía MartínezNo ratings yet
- METODO DE CAQUOT Final Modo de Compatibilidad PDFDocument10 pagesMETODO DE CAQUOT Final Modo de Compatibilidad PDFYu Mats100% (1)
- Modulo PWM para Control de Motores (Autoguardado)Document10 pagesModulo PWM para Control de Motores (Autoguardado)Cristhian SG Pato AlamaNo ratings yet
- Modulos PWM para Control de MotoresDocument8 pagesModulos PWM para Control de MotoresWesther Eduardo ANo ratings yet
- Modulo CCP MicroDocument23 pagesModulo CCP MicroAlberto Hinojosa100% (1)
- 10 - Módulo CCPDocument48 pages10 - Módulo CCPKevin René Alarcón CalderónNo ratings yet
- Microcontrolador PIC16F887 TimersDocument13 pagesMicrocontrolador PIC16F887 Timersmoycs4No ratings yet
- Timers y PWM - 0Document11 pagesTimers y PWM - 0Jesús VazquezNo ratings yet
- Módulo Timer/PWMDocument12 pagesMódulo Timer/PWMHeysell KathiuskaNo ratings yet
- PWM On The ATmega328Document14 pagesPWM On The ATmega328Miguel Ángel Murillo RamírezNo ratings yet
- 4 2Document15 pages4 2López SantiagoNo ratings yet
- Módulo CCP y Módulo EEPROMDocument19 pagesMódulo CCP y Módulo EEPROMGabriel Llerena QuenayaNo ratings yet
- AVR Timer0 en modo normalDocument12 pagesAVR Timer0 en modo normalRicardo LimonNo ratings yet
- Arduino - CC Es Tutorial SecretsOfArduinoPWMDocument7 pagesArduino - CC Es Tutorial SecretsOfArduinoPWMPedro Cu AguirreNo ratings yet
- Timer 0 Pic16f887Document11 pagesTimer 0 Pic16f887Jack MercuryNo ratings yet
- Atmega16 Contadores y TemporizadoresDocument12 pagesAtmega16 Contadores y TemporizadoresRick HunterNo ratings yet
- Generar Señal PWM para Servo Con AVR ATmega328pDocument9 pagesGenerar Señal PWM para Servo Con AVR ATmega328pPierDonneeNo ratings yet
- AVR Programación en CDocument14 pagesAVR Programación en CAnonymous H3E7i3YzydNo ratings yet
- Practica 8 - Modulación Por Ancho de PulsoDocument10 pagesPractica 8 - Modulación Por Ancho de PulsoAlejandra OlveraNo ratings yet
- Configuración y uso de temporizadores y contadores en PIC16F877ADocument18 pagesConfiguración y uso de temporizadores y contadores en PIC16F877AAlejandro Martin TorresNo ratings yet
- Clase 07 - TimersDocument8 pagesClase 07 - TimersJesus AvilaNo ratings yet
- Piano ArduinoDocument5 pagesPiano ArduinoMartin CastroNo ratings yet
- RegistrosDocument13 pagesRegistrosLeonardo BorregoNo ratings yet
- R5 - CCP - Rodrigo Lopez - Javier Mazas - Guillermo MuñozDocument9 pagesR5 - CCP - Rodrigo Lopez - Javier Mazas - Guillermo MuñozRODRIGO LOPEZ GUTIERREZNo ratings yet
- LEDs A Distintas FrecuenciasDocument12 pagesLEDs A Distintas FrecuenciasMax GarciaNo ratings yet
- Configuración PWM con CCP1 en PIC16F877ADocument13 pagesConfiguración PWM con CCP1 en PIC16F877AIsaac Noyola ManzanoNo ratings yet
- Presentacion Timer PicDocument6 pagesPresentacion Timer PicGonzaloNo ratings yet
- Reloj Contador CronometroDocument11 pagesReloj Contador CronometroCristian Granda50% (2)
- Practica 2 Ensamblador - Jesus Asmeth Perez Camacho PDFDocument5 pagesPractica 2 Ensamblador - Jesus Asmeth Perez Camacho PDFJesus Asmeth Perez CamachoNo ratings yet
- Los Timers o Temporizadores Son Características Estándar de Casi Todos Los MicrocontroladoresDocument16 pagesLos Timers o Temporizadores Son Características Estándar de Casi Todos Los Microcontroladoresoscar roperoNo ratings yet
- Sesion 14 - Timers e InterrupcionesDocument42 pagesSesion 14 - Timers e InterrupcionesRosly Asto SedanoNo ratings yet
- Timers Avr Atmega8Document7 pagesTimers Avr Atmega8Jairo SantistebanNo ratings yet
- El Temporizador Timer 0 en Los Micro Control Adores PICDocument14 pagesEl Temporizador Timer 0 en Los Micro Control Adores PICAlex OviedoNo ratings yet
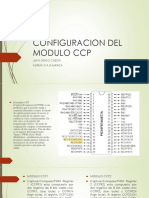
- Configuracion Del Modulo CCPDocument16 pagesConfiguracion Del Modulo CCPJuan Diego CuestaNo ratings yet
- Tmr0 e InterrupcionesDocument19 pagesTmr0 e InterrupcionesWilliam's Limonchi SandovalNo ratings yet
- PWM en ArduinoDocument8 pagesPWM en ArduinoRicardo VelardiNo ratings yet
- Practica2 MicrocontroladoresDocument11 pagesPractica2 MicrocontroladoresEzequiel DiazNo ratings yet
- Investigación Sobre Modulo CCP (Capture, Compare, PWM)Document10 pagesInvestigación Sobre Modulo CCP (Capture, Compare, PWM)JP Cylia Toapanta100% (2)
- VAZQCARR6IM1P1Document22 pagesVAZQCARR6IM1P1pepeNo ratings yet
- Aplicaciones de La Modulación PWMDocument11 pagesAplicaciones de La Modulación PWMkevinvilla100% (2)
- Modulación PWM con ATmega8Document42 pagesModulación PWM con ATmega8Jose Ruben TorresHortaNo ratings yet
- PWM Atmega328pDocument4 pagesPWM Atmega328pEmilio FuentesNo ratings yet
- Control PWM con PIC16F628A para variar velocidad de motoresDocument13 pagesControl PWM con PIC16F628A para variar velocidad de motoresOmar Ramirez HerreraNo ratings yet
- PWM MicrocontroladoresDocument18 pagesPWM MicrocontroladoresRaul AlbertoNo ratings yet
- Pic18f2550 - PWMDocument5 pagesPic18f2550 - PWMJHON ERIC RODRIGUEZ CABEZASNo ratings yet
- Labo 4 MicroDocument10 pagesLabo 4 Micromax trNo ratings yet
- 284 MICC-Temporizadores%2Bde%2BPIC16F887Document37 pages284 MICC-Temporizadores%2Bde%2BPIC16F887bryan eduardo villegas carrascoNo ratings yet
- MÓDULO CCP (CapturaDocument27 pagesMÓDULO CCP (CapturaVeruska San Miguel0% (1)
- Uso Timer1 Como Un ContadorDocument5 pagesUso Timer1 Como Un ContadorRUBENNo ratings yet
- Expo 2Document21 pagesExpo 2Oriana MedinaNo ratings yet
- Registro para Controlar Las InterrupcionesDocument10 pagesRegistro para Controlar Las InterrupcionesDiego Alejandro MayaNo ratings yet
- Laboratorio de Microcontroladores Laboratorio N°14 "PWM"Document11 pagesLaboratorio de Microcontroladores Laboratorio N°14 "PWM"Willy Arnold Valencia CamayoNo ratings yet
- PWM en Msp430g2553Document5 pagesPWM en Msp430g2553Carlos LMNo ratings yet
- Timers Avr Atmega8Document21 pagesTimers Avr Atmega8Marvin Mosquera Perez100% (1)
- Trabajo Final MicroprocesadoresDocument18 pagesTrabajo Final MicroprocesadoresNacho CagideNo ratings yet
- Programación de temporizadores AVR en CDocument17 pagesProgramación de temporizadores AVR en Crickypina0% (1)
- TIM Module OverviewDocument38 pagesTIM Module OverviewJuan Ignacio FigueirasNo ratings yet
- PWM Timer2 AVR Modo RápidoDocument17 pagesPWM Timer2 AVR Modo RápidoJose Antonio Meza ChoquehuaytaNo ratings yet
- Modulacion de Simple Banda LateraDocument3 pagesModulacion de Simple Banda LateraEdu Pollo RomNo ratings yet
- Memoria Flahs y Memoria EpromDocument6 pagesMemoria Flahs y Memoria EpromEdu Pollo RomNo ratings yet
- Modulo CanDocument6 pagesModulo CanEdu Pollo RomNo ratings yet
- ConversoresDocument8 pagesConversoresEdu Pollo RomNo ratings yet
- Memoria Flahs y Memoria EpromDocument6 pagesMemoria Flahs y Memoria EpromEdu Pollo RomNo ratings yet
- Resumen Relacion Señal A RuidoDocument3 pagesResumen Relacion Señal A RuidoEdu Pollo RomNo ratings yet
- Resumen Relacion Señal A RuidoDocument3 pagesResumen Relacion Señal A RuidoEdu Pollo RomNo ratings yet
- Modulo de Captura de EntradaDocument3 pagesModulo de Captura de EntradaEdu Pollo RomNo ratings yet
- Resumen Relacion Señal A RuidoDocument3 pagesResumen Relacion Señal A RuidoEdu Pollo RomNo ratings yet
- Memoria Flahs y Memoria EpromDocument6 pagesMemoria Flahs y Memoria EpromEdu Pollo RomNo ratings yet
- Capitulo 15 EduDocument3 pagesCapitulo 15 EduEdu Pollo RomNo ratings yet
- Temas Trabajo Sistemas DiscretosDocument10 pagesTemas Trabajo Sistemas DiscretosEdu Pollo RomNo ratings yet
- Interrupciones y ExcepcionesDocument8 pagesInterrupciones y ExcepcionesEdu Pollo RomNo ratings yet
- Sistemas DiscretosDocument2 pagesSistemas DiscretosEdu Pollo RomNo ratings yet
- Tarea Sistemas DiscretosDocument2 pagesTarea Sistemas DiscretosEdu Pollo RomNo ratings yet
- Ejercicio de Serie de FourierDocument3 pagesEjercicio de Serie de FourierEdu Pollo RomNo ratings yet
- Instituto Tecnologico SudamericanoDocument6 pagesInstituto Tecnologico SudamericanoEdu Pollo RomNo ratings yet
- Trabajo de Sistemas DiscretosDocument9 pagesTrabajo de Sistemas DiscretosEdu Pollo RomNo ratings yet
- Valvula ReguladorDocument10 pagesValvula ReguladorElena SoriaNo ratings yet
- Producto Académico Tarea I - Análisis Estructural IiDocument10 pagesProducto Académico Tarea I - Análisis Estructural IiLucio Garcia HerreraNo ratings yet
- Fisica 01Document6 pagesFisica 01ANTHONY CALDERON OJEDANo ratings yet
- Trabajo de Sistema de Inyección Directa de GasolinaDocument190 pagesTrabajo de Sistema de Inyección Directa de GasolinaCristian VelasquezNo ratings yet
- Informe CentrifugacionDocument3 pagesInforme Centrifugacionvanesa50% (2)
- Ejercicios Espaciales - UNLPDocument24 pagesEjercicios Espaciales - UNLPBelen MedeiroNo ratings yet
- Anillo Con Distrib D Carga No UniformelDocument4 pagesAnillo Con Distrib D Carga No Uniformelkoalagris100% (1)
- Interpretación radiográfica dentalDocument12 pagesInterpretación radiográfica dentalCarlos ChatoNo ratings yet
- El Concepto de Derivada Está Intimamamente Ligado A El Del LímiteDocument23 pagesEl Concepto de Derivada Está Intimamamente Ligado A El Del LímiteHerrera Condori Erick JhNo ratings yet
- Descripcion de Proceso de PropilvenDocument8 pagesDescripcion de Proceso de PropilvenPedro Jose Amaya Osorio100% (1)
- Análisis de modos de fractura y falla en elementos de máquinasDocument40 pagesAnálisis de modos de fractura y falla en elementos de máquinasJefferson Caicedo100% (1)
- Diodo SchottkyDocument6 pagesDiodo SchottkyOscargg FlukeNo ratings yet
- 02 Sistema SCADADocument30 pages02 Sistema SCADAPool DemosNo ratings yet
- Temas Física 8-9 MiguelR CorregidoDocument3 pagesTemas Física 8-9 MiguelR Corregidomiguel rodríguezNo ratings yet
- Trabajo Practico El UniversoDocument8 pagesTrabajo Practico El UniversoFabricio Martinez50% (2)
- Taller EppDocument5 pagesTaller EppCamilo SanabriaNo ratings yet
- PFU Centros de Transformación hormigón hasta 40.5kV 1000kVADocument2 pagesPFU Centros de Transformación hormigón hasta 40.5kV 1000kVAAnonymous cOYX3GRdRBNo ratings yet
- Itp-pls-2006-Hocm Prefabricado y Montaje de Brazo Pozo Ocl 151h en Ocelote 150Document9 pagesItp-pls-2006-Hocm Prefabricado y Montaje de Brazo Pozo Ocl 151h en Ocelote 150Brayan R LopezNo ratings yet
- Ejercicios Expansion Termica 2Document2 pagesEjercicios Expansion Termica 2luis martinezNo ratings yet
- Determinación metales agua EAADocument6 pagesDeterminación metales agua EAAJean Carlos Arias SaldañaNo ratings yet
- Introducción al proceso de elaboración de conservas: Diagrama de flujo de línea de cocidos y crudosDocument8 pagesIntroducción al proceso de elaboración de conservas: Diagrama de flujo de línea de cocidos y crudosPao SANo ratings yet
- Ecuaciones separables y aplicacionesDocument1 pageEcuaciones separables y aplicacionesIgnacio Verdugo0% (1)
- Prontuario de La Radiacion Electromagnetica PDFDocument12 pagesProntuario de La Radiacion Electromagnetica PDFivcscribdNo ratings yet
- Articulo Vision A Profundidad de Bioimpresion 3DDocument25 pagesArticulo Vision A Profundidad de Bioimpresion 3DRogers Lc PerozaNo ratings yet