You might also like
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Novel Modeling and Damping Technique For Hybrid Stepper MotorDocument6 pagesNovel Modeling and Damping Technique For Hybrid Stepper MotorVashik BedasieNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Compensation Algorithms For SMO PMSMDocument8 pagesCompensation Algorithms For SMO PMSMKik0510No ratings yet
- A Modified Sensorless Control of Induction Motor Based On Reactive PowerDocument4 pagesA Modified Sensorless Control of Induction Motor Based On Reactive PowerSherif M. DabourNo ratings yet
- Icee2015 Paper Id3911Document4 pagesIcee2015 Paper Id3911Zellagui EnergyNo ratings yet
- A Sensorless Robust Vector Control of Induction Motor DrivesDocument6 pagesA Sensorless Robust Vector Control of Induction Motor DrivesLava KumarNo ratings yet
- On Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerDocument8 pagesOn Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerRaja ReddyNo ratings yet
- DSP-Based Speed Adaptive Flux Observer of Induction MotorDocument5 pagesDSP-Based Speed Adaptive Flux Observer of Induction MotorthavaselvanNo ratings yet
- Research and Apply PID Hybrid Fuzzy Control TechnologyDocument6 pagesResearch and Apply PID Hybrid Fuzzy Control TechnologyhoangepuNo ratings yet
- Modeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerDocument8 pagesModeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerYassine MbzNo ratings yet
- Paper2 Sliding SRMDocument5 pagesPaper2 Sliding SRMjeba_evaNo ratings yet
- Mras CurrentsDocument7 pagesMras CurrentsAymen OmariNo ratings yet
- PMSMDocument8 pagesPMSMBan KaiNo ratings yet
- Sensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed EstimatorDocument9 pagesSensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed Estimatormechernene_aek9037No ratings yet
- Variable Structure Adaptive Control For P M Synchronous Servo Motor DriveDocument13 pagesVariable Structure Adaptive Control For P M Synchronous Servo Motor DrivelcheekalaNo ratings yet
- A High-Speed Sliding-Mode Observer For The Sensorless Speed Control of A PMSMDocument9 pagesA High-Speed Sliding-Mode Observer For The Sensorless Speed Control of A PMSMMaroju Santosh KiranNo ratings yet
- Sliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouiDocument15 pagesSliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouihasanmasoudiNo ratings yet
- Sensorless Control of Induction Motors With Exponential Stability PropertyDocument6 pagesSensorless Control of Induction Motors With Exponential Stability PropertyHassan KhalidNo ratings yet
- 5695 45 136 Sensorless Detection Rotor SRMDocument15 pages5695 45 136 Sensorless Detection Rotor SRMParamesh WaranNo ratings yet
- Enhancement of Stability of SMIB Using ZN-PID and LQR-PSS As Affected by Excitation ControlDocument6 pagesEnhancement of Stability of SMIB Using ZN-PID and LQR-PSS As Affected by Excitation ControlAshik AhmedNo ratings yet
- Interpolation Technique For Encoder Resolution Improvement in Permanent Magnet Synchronous Motor Drives PDFDocument6 pagesInterpolation Technique For Encoder Resolution Improvement in Permanent Magnet Synchronous Motor Drives PDFarenasjaNo ratings yet
- Jpe 8-4-8Document9 pagesJpe 8-4-8Hieu LENo ratings yet
- I Jfs 2281328905800Document12 pagesI Jfs 2281328905800Tawhid Bin TarekNo ratings yet
- DSP Control of Stepper MotorDocument5 pagesDSP Control of Stepper MotorAhmedHyderMohdNo ratings yet
- 2015 Fast-SpeedDrivesforPermanentMagnetDocument7 pages2015 Fast-SpeedDrivesforPermanentMagnetjemmyducNo ratings yet
- Sensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverDocument7 pagesSensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverWalid AbidNo ratings yet
- Reduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationDocument14 pagesReduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationChengyu NiuNo ratings yet
- Sensorless Control of Permanent Magnet Synchronous Motor With Stator Flux EstimationDocument5 pagesSensorless Control of Permanent Magnet Synchronous Motor With Stator Flux EstimationPhước Linh TrầnNo ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- Speed Control of DC Servo Motor Using PIDocument26 pagesSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarNo ratings yet
- Research Article: Sensorless Speed Control of Permanent Magnet Synchronous Motors by Neural Network AlgorithmDocument8 pagesResearch Article: Sensorless Speed Control of Permanent Magnet Synchronous Motors by Neural Network AlgorithmfvijayamiNo ratings yet
- Simulink Implementation of Two-Phase Induction Motor Model: Gabriela CR - CIUNADocument4 pagesSimulink Implementation of Two-Phase Induction Motor Model: Gabriela CR - CIUNAnitishkatalNo ratings yet
- Three-Phase Induction Motor DTC-SVM Scheme With Self-Tuning PI-Type Fuzzy ControllerDocument6 pagesThree-Phase Induction Motor DTC-SVM Scheme With Self-Tuning PI-Type Fuzzy Controllerjorgeluis.unknownman667No ratings yet
- Tesis JuanCamiloNustes Article Format Draft2Document19 pagesTesis JuanCamiloNustes Article Format Draft2kamdem kouam ynnickNo ratings yet
- Effective Estimation of Speed and Rotor Position Using Kalman FilterDocument7 pagesEffective Estimation of Speed and Rotor Position Using Kalman FilterAli H. NumanNo ratings yet
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDocument6 pagesComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20No ratings yet
- Arindam Seminar 11Document6 pagesArindam Seminar 11Arindam BhattacharjeeNo ratings yet
- A Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor DriveDocument6 pagesA Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor Driveshoebhussain01No ratings yet
- Vibration Prediction in Switched Reluctance Motors With Transfer Function Identification From Shaker and Force Hammer TestsDocument8 pagesVibration Prediction in Switched Reluctance Motors With Transfer Function Identification From Shaker and Force Hammer TestsKaran ShahNo ratings yet
- Neural Network Sliding-Mode Position Controller For Induction Servo DriveDocument12 pagesNeural Network Sliding-Mode Position Controller For Induction Servo DriveumerNo ratings yet
- Open-Loop Torque Boost and Slip Frequency Compensation for V/f InvertersDocument4 pagesOpen-Loop Torque Boost and Slip Frequency Compensation for V/f Invertersjiwani87No ratings yet
- Robust DTC Control of Doubly-Fed Induction Machines Using Recurrent Neural NetworksDocument7 pagesRobust DTC Control of Doubly-Fed Induction Machines Using Recurrent Neural NetworksnaserhashemniaNo ratings yet
- Speed Control of Switched Reluctance Motor-LibreDocument9 pagesSpeed Control of Switched Reluctance Motor-LibreIndrajithSrNo ratings yet
- Fuzzy Sliding Mode Control of Permanent Magnet Synchronous Motor Based On The Integral Sliding Mode SurfaceDocument6 pagesFuzzy Sliding Mode Control of Permanent Magnet Synchronous Motor Based On The Integral Sliding Mode SurfacemaryamNo ratings yet
- Sensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.irDocument8 pagesSensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.ira1690074No ratings yet
- Fuzzy PI Vector Control of Induction MotorDocument5 pagesFuzzy PI Vector Control of Induction MotorjhonnydesaNo ratings yet
- Adaptive Input-OutputDocument10 pagesAdaptive Input-Outputmail2pramod86No ratings yet
- Using The PMSM Vector Control eTPU Function: Covers The MCF523x, MPC5500, MPC5600 and All eTPU-Equipped DevicesDocument27 pagesUsing The PMSM Vector Control eTPU Function: Covers The MCF523x, MPC5500, MPC5600 and All eTPU-Equipped Devicesbadro1980No ratings yet
- Điều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiDocument10 pagesĐiều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiNguyễn Văn HoàNo ratings yet
- Sensitivity Analysis of IM Speed Estimation AlgorithmDocument18 pagesSensitivity Analysis of IM Speed Estimation Algorithmmechernene_aek9037No ratings yet
- SantaDocument11 pagesSantaVashik BedasieNo ratings yet
- CMP0193 SynopsisDocument6 pagesCMP0193 Synopsissumiths32No ratings yet
- 03 2008 JA PS A 1 008 CleanDocument6 pages03 2008 JA PS A 1 008 CleanBentarfa IslamNo ratings yet
- Speed Regulation An Induction Motor Using Reference Adaptive ControlDocument5 pagesSpeed Regulation An Induction Motor Using Reference Adaptive ControlAtakan OzturKNo ratings yet
- Dynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelDocument5 pagesDynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelenmnabilNo ratings yet
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDocument6 pagesArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNo ratings yet
- InTech-Speed Sensorless Control of Motor For Railway VehiclesDocument25 pagesInTech-Speed Sensorless Control of Motor For Railway VehiclesdimitaringNo ratings yet
- The Speed Control of PMSMDocument5 pagesThe Speed Control of PMSMMehmet KırgözoğluNo ratings yet
- Fuzzy Sliding Mode Controller for Field-Oriented Induction Motor DriveDocument6 pagesFuzzy Sliding Mode Controller for Field-Oriented Induction Motor DriveAshwani RanaNo ratings yet
- SN 4 UncertaintiesDocument53 pagesSN 4 UncertaintiesAparna AkhileshNo ratings yet
- 6 and 12 Step InverterDocument42 pages6 and 12 Step InverterAparna AkhileshNo ratings yet
- s3 Mtech FT PT Eng ResultDocument19 pagess3 Mtech FT PT Eng ResultAparna AkhileshNo ratings yet
- SN 5 Robust Stability Ha ContextDocument46 pagesSN 5 Robust Stability Ha ContextAparna AkhileshNo ratings yet
- Fuzzy Logic Examples Using Matlab PDFDocument7 pagesFuzzy Logic Examples Using Matlab PDFCarlos MuñizNo ratings yet
- Student DataDocument7 pagesStudent DataAparna AkhileshNo ratings yet
- Lecture 4: Well-Posedness and Internal StabilityDocument48 pagesLecture 4: Well-Posedness and Internal StabilityAparna AkhileshNo ratings yet
- SN 3 What Is Robust ControlDocument24 pagesSN 3 What Is Robust ControlAparna AkhileshNo ratings yet
- Introduction To Digital Control Systems - Lecture NotesDocument4 pagesIntroduction To Digital Control Systems - Lecture NotessridharparthipanNo ratings yet
- Intro IpmDocument2 pagesIntro IpmAparna AkhileshNo ratings yet
- Solid State Power ControllersDocument4 pagesSolid State Power ControllersAparna AkhileshNo ratings yet
- Introduction To JSPDocument32 pagesIntroduction To JSPAparna AkhileshNo ratings yet
- I/O Package: Package Contains Many Classes That Your Programs Can Use To Read andDocument3 pagesI/O Package: Package Contains Many Classes That Your Programs Can Use To Read andAparna AkhileshNo ratings yet
- Reusable Launch Vehicle Adaptive Guidanc 104766Document11 pagesReusable Launch Vehicle Adaptive Guidanc 104766Aparna AkhileshNo ratings yet
- PWM Techniques: A Pure Sine Wave InverterDocument91 pagesPWM Techniques: A Pure Sine Wave InverterAndrei BiroNo ratings yet
- Greening of Facilities - Part VDocument81 pagesGreening of Facilities - Part VfifthslipNo ratings yet
- Ec 2006Document11 pagesEc 2006Supriyo GangulyNo ratings yet
- A Control Engineer's Guide To Sliding Mode ControlDocument15 pagesA Control Engineer's Guide To Sliding Mode ControlatommotaNo ratings yet
- AADEA2 E4 D 01Document13 pagesAADEA2 E4 D 01Shekhar MandalNo ratings yet
- Promising Nanomaterials for IndustryDocument34 pagesPromising Nanomaterials for IndustryAparna AkhileshNo ratings yet
- Microcontroller Based Home Security SystemDocument39 pagesMicrocontroller Based Home Security SystemNandagopal Sivakumar100% (1)
- Dr. Apj Speech at Dps UaeDocument16 pagesDr. Apj Speech at Dps UaeAparna AkhileshNo ratings yet
- Plumbing SystemDocument2 pagesPlumbing SystemAparna AkhileshNo ratings yet
- ABB Contactor RelaysDocument17 pagesABB Contactor RelaysAparna AkhileshNo ratings yet
- Dr. Apj Speech at Dps UaeDocument16 pagesDr. Apj Speech at Dps UaeAparna AkhileshNo ratings yet
- M.E. Construction Engineering and Management 30.10.08revisedDocument36 pagesM.E. Construction Engineering and Management 30.10.08revisedAparna AkhileshNo ratings yet
- FINAL PACKING REPORT FOR OFFSHORE DRILL MOTORDocument14 pagesFINAL PACKING REPORT FOR OFFSHORE DRILL MOTORSanju laaNo ratings yet
- The Difference Between Asynchronous and Synchronous MotorsDocument6 pagesThe Difference Between Asynchronous and Synchronous MotorsShiva Kumar ReddyNo ratings yet
- Working of Mixie and Its MotorDocument6 pagesWorking of Mixie and Its Motorkp yadhavNo ratings yet
- Question BankDocument3 pagesQuestion BanksangsangicnuNo ratings yet
- Eem507 Electrical Technology: Unit - 1 D.C.MotorDocument7 pagesEem507 Electrical Technology: Unit - 1 D.C.MotorShubham SharmaNo ratings yet
- 17 - Pret Piese LinhaiDocument52 pages17 - Pret Piese LinhaiSebastian FlorescuNo ratings yet
- Formation VF KEBDocument90 pagesFormation VF KEBAidolan UlrichNo ratings yet
- Synchronous Motor Operation and Control Laboratory ExperimentDocument2 pagesSynchronous Motor Operation and Control Laboratory ExperimentHéctor AlmodovarNo ratings yet
- ONGC GT Electrical Previous Question PapersDocument5 pagesONGC GT Electrical Previous Question PapersJay Prakash PatelNo ratings yet
- Introduction to Engineering Electronics Motors and ApplicationsDocument15 pagesIntroduction to Engineering Electronics Motors and ApplicationsPetrovai AlexandruNo ratings yet
- Malfunction Diagnosis and Repair Induction MotorDocument1 pageMalfunction Diagnosis and Repair Induction MotorChathura DalugodaNo ratings yet
- Multiple Choice Questions DCM A SecDocument1 pageMultiple Choice Questions DCM A Seckanda71No ratings yet
- Modeling and Simulation of Six-Phase Permanent Magnet Synchronous Motor DriveDocument9 pagesModeling and Simulation of Six-Phase Permanent Magnet Synchronous Motor Driveجمال ضيفي100% (1)
- HB Stepper Motor EDocument23 pagesHB Stepper Motor EdiegoNo ratings yet
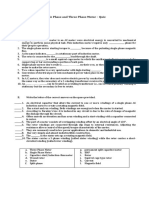
- Single Phase and Three Phase Motor QuizDocument2 pagesSingle Phase and Three Phase Motor QuizMeryL AngNo ratings yet
- Electrical Machine Important 25 MCQ PDFDocument3 pagesElectrical Machine Important 25 MCQ PDFsamyalarunNo ratings yet
- Design of 250 W AC Series MotorDocument3 pagesDesign of 250 W AC Series MotorMiguel ArzamendiaNo ratings yet
- EENG350 Lecture Notes Ch4Document16 pagesEENG350 Lecture Notes Ch4yasmin20No ratings yet
- Topic 2 Construction of DC MotorsDocument3 pagesTopic 2 Construction of DC Motorsvalek02No ratings yet
- Calculate Size of DOL and Star-Delta Starter ComponentsDocument11 pagesCalculate Size of DOL and Star-Delta Starter ComponentsBeshoy RedaNo ratings yet
- Electric Braking Methods for MotorsDocument11 pagesElectric Braking Methods for MotorsNeeraj NagaNo ratings yet
- EI6402 Electrical Machines SyllabusDocument1 pageEI6402 Electrical Machines SyllabusAyyar KandasamyNo ratings yet
- Motor Motor Type Rated Voltage Bus VoltageDocument5 pagesMotor Motor Type Rated Voltage Bus VoltageoinonNo ratings yet
- 04 - Arranque de MotoresDocument13 pages04 - Arranque de MotoresJadu QuinoNo ratings yet
- AC MotorDocument18 pagesAC MotorNAVNEET GUPTANo ratings yet
- 150 KW Motor SpecDocument6 pages150 KW Motor SpecWAN CHANDNo ratings yet
- Module 5: Induction Motors ExplainedDocument24 pagesModule 5: Induction Motors ExplainedJaniel MalitNo ratings yet
- Induction MotorDocument11 pagesInduction MotorMsKarolyNo ratings yet
- Chapter 7: DC Machinery Fundamentals: V 48 M 5 - 0 M 25 - 0 500 Rad/sDocument12 pagesChapter 7: DC Machinery Fundamentals: V 48 M 5 - 0 M 25 - 0 500 Rad/sGiordano Brito RodriguezNo ratings yet
- BLDC Working and Practical ImplementationDocument20 pagesBLDC Working and Practical ImplementationNaga AnanthNo ratings yet