You might also like
- AC Motor, Servo Motor and Stepper MotorDocument12 pagesAC Motor, Servo Motor and Stepper MotorAhmedSayedNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Servo MotorDocument8 pagesServo MotorzaidNo ratings yet
- EPS: Electric Power Steering Components & ModesDocument9 pagesEPS: Electric Power Steering Components & ModesTilahun WorkuNo ratings yet
- Everything about Servo MotorsDocument31 pagesEverything about Servo Motorsadiamiru25% (4)
- CE ENG HL660,660L, HL665,665L AUG2018 Rev.0 WebDocument4 pagesCE ENG HL660,660L, HL665,665L AUG2018 Rev.0 WebJohn LeonneNo ratings yet
- Servo MotorDocument41 pagesServo MotorVaibhav Patil100% (1)
- STEPPER MOTOR DEFINITIONDocument19 pagesSTEPPER MOTOR DEFINITIONIan Bagunas100% (2)
- Risk Culture Assessment QuestionnaireDocument3 pagesRisk Culture Assessment QuestionnairemohamedNo ratings yet
- Servo Motor ControlDocument72 pagesServo Motor ControlTien-Thinh NguyenNo ratings yet
- Servo Motor Guide: Types, Construction & ApplicationsDocument7 pagesServo Motor Guide: Types, Construction & ApplicationsAHMED YOUSEFNo ratings yet
- Potentiometric TitrationDocument12 pagesPotentiometric TitrationTien Haminh100% (1)
- Electromechanical SteeringDocument34 pagesElectromechanical Steeringzaka_czNo ratings yet
- Shs Core Subjects MelcsDocument63 pagesShs Core Subjects MelcsRoldan Merjudio100% (1)
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- What is a Servo Motor? Everything You Need to Know in 38 CharactersDocument15 pagesWhat is a Servo Motor? Everything You Need to Know in 38 CharactersShivshankar GhugeNo ratings yet
- Conflict MangementDocument35 pagesConflict Mangementmadhuri_bind100% (1)
- Servo Motor - RushikeshDocument17 pagesServo Motor - RushikeshRushikesh wavare100% (2)
- Understanding Servo MotorsDocument103 pagesUnderstanding Servo MotorsQasir NawazNo ratings yet
- What Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorDocument11 pagesWhat Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorThe-kiros HadushNo ratings yet
- Servo Motor and Servo MechanismDocument11 pagesServo Motor and Servo MechanismkloirywbdNo ratings yet
- Electric Motor Drives and their Applications with Simulation PracticesFrom EverandElectric Motor Drives and their Applications with Simulation PracticesNo ratings yet
- Robot Drive Systems and End Effectors GuideDocument10 pagesRobot Drive Systems and End Effectors GuideMICHEL RAJ0% (1)
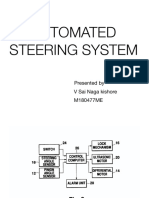
- Automated Steering System Sensors and ActuatorsDocument15 pagesAutomated Steering System Sensors and ActuatorsKumari RaginiNo ratings yet
- DC Servomotors Assignment 02Document5 pagesDC Servomotors Assignment 02Saad BhattiNo ratings yet
- Unit Ii PDFDocument17 pagesUnit Ii PDFManojKumar MNo ratings yet
- Unit-II: Robot Drive Systems and End EffectorsDocument81 pagesUnit-II: Robot Drive Systems and End EffectorsSatheesh KumarNo ratings yet
- Robot Drive Systems and End Effectors GuideDocument84 pagesRobot Drive Systems and End Effectors GuideSatheesh KumarNo ratings yet
- Mechatronics Lab Assignment: Servo MotorsDocument3 pagesMechatronics Lab Assignment: Servo MotorsNavendu GuptaNo ratings yet
- The Mechanical Aspects of RoboticsDocument19 pagesThe Mechanical Aspects of RoboticsSuryakant MunjewarNo ratings yet
- University of Kirkuk College of Engineering Mechanical DepartmentDocument6 pagesUniversity of Kirkuk College of Engineering Mechanical Departmentعبدالمؤمن خالد محمودNo ratings yet
- Introduction to Motion Control TechnologiesDocument4 pagesIntroduction to Motion Control TechnologiesKhadija RvNo ratings yet
- Steppermotor Lecture 17Document12 pagesSteppermotor Lecture 17Ms Noor ul AinNo ratings yet
- ELX-321-MODULE-2-Drive System and End Effector (1)Document14 pagesELX-321-MODULE-2-Drive System and End Effector (1)Ervert SoteraniaNo ratings yet
- University of Kirkuk College of Engineering Mechanical DepartmentDocument6 pagesUniversity of Kirkuk College of Engineering Mechanical Departmentعبدالمؤمن خالد محمود100% (1)
- G 07 NewDocument15 pagesG 07 NewZacknaick 001No ratings yet
- Hill Station Breaking SystemDocument48 pagesHill Station Breaking Systemkanchan bone80% (5)
- Introduction To Autonomous RobotsDocument3 pagesIntroduction To Autonomous RobotsNitin NauhvarNo ratings yet
- Mini Report-Hill Station Breaking SystemDocument24 pagesMini Report-Hill Station Breaking SystemNikhil PimpareNo ratings yet
- Stepper & Servo: Pros & Cons: Drawing Courtesy of National InstrumentsDocument5 pagesStepper & Servo: Pros & Cons: Drawing Courtesy of National Instrumentsmvcky2008No ratings yet
- Introduction Robot Drive SystemsDocument17 pagesIntroduction Robot Drive SystemsTemesgen100% (2)
- Robotics IntroductionDocument22 pagesRobotics IntroductionPrashanth BnNo ratings yet
- Submitted B: Submatted ToDocument24 pagesSubmitted B: Submatted Tosunil dadarwalNo ratings yet
- Full AutomationDocument16 pagesFull AutomationunimkeNo ratings yet
- Chapter1 121210210811 Phpapp02Document57 pagesChapter1 121210210811 Phpapp02sharkeraNo ratings yet
- Introduction to Servo Motors: Control, Assembly, RotationDocument3 pagesIntroduction to Servo Motors: Control, Assembly, RotationhelloNo ratings yet
- Automatic Side StandDocument23 pagesAutomatic Side StandShekhar Sawant0% (1)
- Assignment On Servo Motor: January 2018Document4 pagesAssignment On Servo Motor: January 2018Simagn BekeleNo ratings yet
- Brushless Servomotor: Presented byDocument16 pagesBrushless Servomotor: Presented byDev KumarNo ratings yet
- Full Lenth PeparDocument26 pagesFull Lenth Peparakshay sawansukhaNo ratings yet
- Four Wheels SteeringDocument18 pagesFour Wheels SteeringArpith KumarNo ratings yet
- Project Report ON Eps Motor: Submitted By:Rajnish ROLL NO:08614803609Document16 pagesProject Report ON Eps Motor: Submitted By:Rajnish ROLL NO:08614803609Ankit VermaNo ratings yet
- Servo MotorDocument4 pagesServo MotorWasil BabarNo ratings yet
- Stepper (Rajvardhan Jaideva)Document13 pagesStepper (Rajvardhan Jaideva)Rajvardhan JaidevaNo ratings yet
- Servo MotorDocument9 pagesServo Motoramanda christineNo ratings yet
- Ac MotorsDocument12 pagesAc MotorsSUNDAR THANGAPANDINo ratings yet
- Controlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACDocument17 pagesControlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACandita ranniNo ratings yet
- Differences Between Stepper Motors and Servo MotorsDocument1 pageDifferences Between Stepper Motors and Servo MotorsazharzebNo ratings yet
- Prepared By: Line Following RobotDocument9 pagesPrepared By: Line Following RobotShayan FarrukhNo ratings yet
- Motors Convert Electric Energy To Mechanical MotionDocument9 pagesMotors Convert Electric Energy To Mechanical MotionwissamhijaziNo ratings yet
- Project AEDDocument31 pagesProject AEDHuy HoàngNo ratings yet
- Automatic Gear Shifting in 2 WheelerDocument21 pagesAutomatic Gear Shifting in 2 WheelerJilly ArasuNo ratings yet
- British Airways Case Study SolutionDocument2 pagesBritish Airways Case Study SolutionHassan ZafarNo ratings yet
- Summary of C: How To Program Sixth Edition by Deitel: Introduction To Computers, The Internet and The WebDocument15 pagesSummary of C: How To Program Sixth Edition by Deitel: Introduction To Computers, The Internet and The WebFrieda NgaharjoNo ratings yet
- C6713 Lab ManualDocument51 pagesC6713 Lab Manualsmganorkar100% (1)
- MATHEMATICS Compulsory Part Paper 1: Question-Answer BookDocument20 pagesMATHEMATICS Compulsory Part Paper 1: Question-Answer Booknicole wongNo ratings yet
- SampleDocument13 pagesSamplemypermatakoe71No ratings yet
- ZEISS CALYPSO 2021 Flyer Action Software Options ENDocument2 pagesZEISS CALYPSO 2021 Flyer Action Software Options ENnaveensirNo ratings yet
- Prediction On Miss Mamta Banerjee Honorable CM of West Bengal Much Much Before Result and Election by Indranil RayDocument24 pagesPrediction On Miss Mamta Banerjee Honorable CM of West Bengal Much Much Before Result and Election by Indranil RayIndranil RayNo ratings yet
- ICN Question Bank Unit-1, 2 and 3 (Upto GSM Identifier)Document1 pageICN Question Bank Unit-1, 2 and 3 (Upto GSM Identifier)Snehal PatelNo ratings yet
- Jakob's Ten Usability Heuristics: Nielsen Norman GroupDocument11 pagesJakob's Ten Usability Heuristics: Nielsen Norman GroupPiyush ChauhanNo ratings yet
- Prey (2017) 100%Document11 pagesPrey (2017) 100%Joe AndrewNo ratings yet
- The Ultimate Guide to Building an Engaged CommunityDocument24 pagesThe Ultimate Guide to Building an Engaged CommunityCarla UttermanNo ratings yet
- 8th Grade GT Science SyllabusDocument2 pages8th Grade GT Science Syllabusapi-420198655No ratings yet
- BW1114-B2 Bendix Brake CatalogDocument116 pagesBW1114-B2 Bendix Brake Cataloggearhead1100% (1)
- Critical Regionalism in ArchitectureDocument75 pagesCritical Regionalism in ArchitecturebranishNo ratings yet
- Floor Boxes and Power Supplies OverviewDocument32 pagesFloor Boxes and Power Supplies OverviewAbdoNo ratings yet
- Katalog - Bengkel Print Indonesia PDFDocument32 pagesKatalog - Bengkel Print Indonesia PDFJoko WaringinNo ratings yet
- Anti Climbers FlyerDocument2 pagesAnti Climbers Flyeredark2009No ratings yet
- MT Co234 - Merged - MergedDocument73 pagesMT Co234 - Merged - MergedPavas ManoharNo ratings yet
- Overhead Line Splices Automatic Copper: Splices For Metric ConductorDocument27 pagesOverhead Line Splices Automatic Copper: Splices For Metric ConductorAzad RahmanNo ratings yet
- Hydraulic Accumulator - Test and Charge: Cerrar SIS Pantalla AnteriorDocument9 pagesHydraulic Accumulator - Test and Charge: Cerrar SIS Pantalla AnteriorHomer Yoel Nieto Mendoza100% (1)
- To Signals and SystemsDocument57 pagesTo Signals and SystemsMUHAMMAD HAFIZUDDINNo ratings yet
- Daniel Kipkirong Tarus C.VDocument19 pagesDaniel Kipkirong Tarus C.VPeter Osundwa KitekiNo ratings yet
- NASA: 2202main COL Debris Boeing 030121Document9 pagesNASA: 2202main COL Debris Boeing 030121NASAdocumentsNo ratings yet
- 5100 Series Gas Analyzer: Product Data SheetDocument2 pages5100 Series Gas Analyzer: Product Data SheetSai KamalaNo ratings yet
- Viking Tech ARG03FTC2551 - C217943Document8 pagesViking Tech ARG03FTC2551 - C217943ALIRIO SOLANONo ratings yet