You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ch1 Erp Quiz BankDocument9 pagesch1 Erp Quiz Bankrajlaxmi1001No ratings yet
- PVPM 1500X: Peak Power Measuring Device and I-V-Curve Tracer For PV Modules and GeneratorsDocument51 pagesPVPM 1500X: Peak Power Measuring Device and I-V-Curve Tracer For PV Modules and GeneratorsdyjimenezNo ratings yet
- Solution For Exam 4Document6 pagesSolution For Exam 4Mauricio FloresNo ratings yet
- Index: S.No Date Page# Topic Remarks SignDocument4 pagesIndex: S.No Date Page# Topic Remarks SignMoiz AhmedNo ratings yet
- Ce-312 Data Communication 6th Semester Computer Engineering (Batch 2007) Section C Sessional MarksDocument4 pagesCe-312 Data Communication 6th Semester Computer Engineering (Batch 2007) Section C Sessional MarksMoiz AhmedNo ratings yet
- Currency Converter: Enter Amount in Rs 1000Document1 pageCurrency Converter: Enter Amount in Rs 1000Moiz AhmedNo ratings yet
- Calculator: Object: Make A Calculator Using Ms ExcelDocument1 pageCalculator: Object: Make A Calculator Using Ms ExcelMoiz AhmedNo ratings yet
- CH 12Document26 pagesCH 12Moiz AhmedNo ratings yet
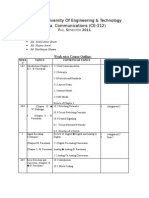
- Data Com Outline 2011Document3 pagesData Com Outline 2011Moiz AhmedNo ratings yet
- PrinterDocument2 pagesPrinterMoiz AhmedNo ratings yet
- Overview of Data Communications and NetworkingDocument18 pagesOverview of Data Communications and NetworkingMoiz AhmedNo ratings yet
- Overview of Data Communications and NetworkingDocument18 pagesOverview of Data Communications and NetworkingMoiz AhmedNo ratings yet
- CH 10Document48 pagesCH 10Moiz AhmedNo ratings yet
- CH 04Document46 pagesCH 04Moiz AhmedNo ratings yet
- MFRP KjlkjassignmentDocument23 pagesMFRP KjlkjassignmentMoiz AhmedNo ratings yet
- SasDocument14 pagesSasMoiz AhmedNo ratings yet
- FSDFDDocument15 pagesFSDFDMoiz AhmedNo ratings yet
- New Microsoft Word DocumentDocument1 pageNew Microsoft Word DocumentMoiz AhmedNo ratings yet
- MIS Chapter 01Document29 pagesMIS Chapter 01Moiz Ahmed100% (1)
- DC Front PageDocument2 pagesDC Front PageMoiz AhmedNo ratings yet
- Sirsyed University Ofengineering & Technology (Ssuet) Computerengineering DepartmentDocument3 pagesSirsyed University Ofengineering & Technology (Ssuet) Computerengineering DepartmentMoiz AhmedNo ratings yet
- All ProgsDocument3 pagesAll ProgsMoiz AhmedNo ratings yet
- 1Document2 pages1Moiz AhmedNo ratings yet
- Lab 08 OopDocument6 pagesLab 08 OopMoiz Ahmed100% (1)
- Flip-Flop Types, Their Conversion and Applications - GeeksforGeeksDocument3 pagesFlip-Flop Types, Their Conversion and Applications - GeeksforGeeksRaJu AhMeDNo ratings yet
- AI Project CycleDocument7 pagesAI Project CyclevratNo ratings yet
- Hannstar J mv-4 94v-0 0823 - Dell - Studio - 1435 - 1535 - QUANTA - FM6 - DISCRETE - REV - 3A PDFDocument58 pagesHannstar J mv-4 94v-0 0823 - Dell - Studio - 1435 - 1535 - QUANTA - FM6 - DISCRETE - REV - 3A PDFPaxOtium75% (4)
- Philips Tpn15.2ela Chassis 312278519972 PDFDocument71 pagesPhilips Tpn15.2ela Chassis 312278519972 PDFВячеслав Шевчук0% (1)
- Firmware - Upgrade - Tool - Duplex User Guide: TRACUT001Document30 pagesFirmware - Upgrade - Tool - Duplex User Guide: TRACUT001jamesbolNo ratings yet
- Bit NamiDocument3 pagesBit NamiRunflowDerNo ratings yet
- Fall 2020 - Cloud Computing and Big Data - HW 1Document7 pagesFall 2020 - Cloud Computing and Big Data - HW 1rahulNo ratings yet
- Can Chatgpt Help Improve CybersecurityDocument2 pagesCan Chatgpt Help Improve CybersecurityVisiontech InternationalNo ratings yet
- Final Exam SE-2 (Design)Document10 pagesFinal Exam SE-2 (Design)Thuy TienNo ratings yet
- Worksheet: Fioofile AppsDocument1 pageWorksheet: Fioofile AppsedaragagansridweepNo ratings yet
- Junit - A Standard Unit Testing Tool For Java Programs: TestresultDocument3 pagesJunit - A Standard Unit Testing Tool For Java Programs: TestresultGeorge Alexandru TarbaNo ratings yet
- Artizo Digital Notebook by SlidesgoDocument48 pagesArtizo Digital Notebook by SlidesgoMary JoyNo ratings yet
- Altium Designer Training For Schematic Capture and PCB EditingDocument248 pagesAltium Designer Training For Schematic Capture and PCB EditingAntonio Dx80% (5)
- M4 - Socio Cyber InformaticsDocument27 pagesM4 - Socio Cyber InformaticsIt's meNo ratings yet
- Benifits of LiferayDocument58 pagesBenifits of LiferayZohir RaihanNo ratings yet
- A Guide To The SAS Studio 3.8 Documentation and Programming Documentation For SAS 9.4 and SAS ViyaDocument2 pagesA Guide To The SAS Studio 3.8 Documentation and Programming Documentation For SAS 9.4 and SAS ViyaPr PaNo ratings yet
- Template MatchingDocument5 pagesTemplate MatchinghachanNo ratings yet
- PTU300 Order Form GlobalDocument4 pagesPTU300 Order Form GlobalmadaNo ratings yet
- Chapter 11 - 15 Theory Related To Practical (Files & Documents)Document10 pagesChapter 11 - 15 Theory Related To Practical (Files & Documents)HibaOsama Zaki100% (2)
- 3.2.2.4 Packet Tracer - Configuring Trunks (1) .PkaDocument2 pages3.2.2.4 Packet Tracer - Configuring Trunks (1) .PkaL hernandez AndersonNo ratings yet
- Joyce ResumeDocument3 pagesJoyce ResumeDhaval PatelNo ratings yet
- SSDV-SEC450 - Week 6 - Implement IOS IPSec Site-To-site VPN With Pre-Shared KeyDocument34 pagesSSDV-SEC450 - Week 6 - Implement IOS IPSec Site-To-site VPN With Pre-Shared KeyrussNo ratings yet
- 80-Nu141-1 B Adreno Opengl Es Developer GuideDocument170 pages80-Nu141-1 B Adreno Opengl Es Developer GuideShen ShenNo ratings yet
- Reset Factory Msm320-rDocument1 pageReset Factory Msm320-rCharly GlezNo ratings yet
- Nortel Networks Passport 1000 Routing Switch SeriesDocument12 pagesNortel Networks Passport 1000 Routing Switch SeriesLuis RodriguesNo ratings yet
- Fi 7260 DatasheetDocument2 pagesFi 7260 DatasheetDodi VenesiaNo ratings yet
- The Mining Digital Transformation Roadmap - Round Table DiscussionDocument22 pagesThe Mining Digital Transformation Roadmap - Round Table DiscussionYury FedichkinNo ratings yet