You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Database Final AssignmentDocument8 pagesDatabase Final AssignmentCaijunn TanNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Data Constrution NewDocument27 pagesData Constrution NewBinduPrakashBhattNo ratings yet
- Introduction To Arts & Bots Workshop (2013 Version)Document45 pagesIntroduction To Arts & Bots Workshop (2013 Version)createlabNo ratings yet
- 16-651: Educational Robotics For The Classroom - AssignmentsDocument2 pages16-651: Educational Robotics For The Classroom - AssignmentscreatelabNo ratings yet
- CourseSchedule FinalDocument2 pagesCourseSchedule FinalcreatelabNo ratings yet
- Educ Evaluation OverviewDocument63 pagesEduc Evaluation OverviewcreatelabNo ratings yet
- Arts & Bots Workshop June 21, 2013Document1 pageArts & Bots Workshop June 21, 2013createlabNo ratings yet
- Arts & Bots Component Reference Sheet (Version 2)Document2 pagesArts & Bots Component Reference Sheet (Version 2)createlabNo ratings yet
- System Engineering OverviewDocument72 pagesSystem Engineering OverviewcreatelabNo ratings yet
- Robot Kits and IssuesDocument14 pagesRobot Kits and IssuescreatelabNo ratings yet
- Educational Robotics ApplicationformDocument3 pagesEducational Robotics ApplicationformcreatelabNo ratings yet
- Homework 2 Educational RoboticDocument1 pageHomework 2 Educational RoboticcreatelabNo ratings yet
- Robot Diaries OverviewDocument26 pagesRobot Diaries OverviewcreatelabNo ratings yet
- Making Faces Pico GuideDocument12 pagesMaking Faces Pico GuidecreatelabNo ratings yet
- Robot 250 Robot 2050Document35 pagesRobot 250 Robot 2050createlabNo ratings yet
- Garth Zeglin Art and RoboticsDocument26 pagesGarth Zeglin Art and RoboticscreatelabNo ratings yet
- Final Project CMU CourseDocument2 pagesFinal Project CMU CoursecreatelabNo ratings yet
- Homework 1 - Educational RobotiDocument1 pageHomework 1 - Educational RoboticreatelabNo ratings yet
- HERB: A Home Exploring Robot Butler: Siddhartha SrinivasaDocument28 pagesHERB: A Home Exploring Robot Butler: Siddhartha SrinivasacreatelabNo ratings yet
- Robot Diaries Arm Lab LessonDocument9 pagesRobot Diaries Arm Lab LessoncreatelabNo ratings yet
- Lesson Plan: TheaterDocument8 pagesLesson Plan: TheatercreatelabNo ratings yet
- Mid Schoolteachers 0711Document27 pagesMid Schoolteachers 0711createlabNo ratings yet
- Computer Graphics at CarnegieDocument1 pageComputer Graphics at CarnegiecreatelabNo ratings yet
- Concept DefinitionDocument2 pagesConcept DefinitioncreatelabNo ratings yet
- CMU Graphics 2011Document9 pagesCMU Graphics 2011createlabNo ratings yet
- Robot Diaries Final ProjectDocument5 pagesRobot Diaries Final ProjectcreatelabNo ratings yet
- May Science Challenge WSDocument5 pagesMay Science Challenge WScreatelabNo ratings yet
- Diane LallyDocument2 pagesDiane LallycreatelabNo ratings yet
- Arts and Bots Planning For UploadDocument1 pageArts and Bots Planning For UploadcreatelabNo ratings yet
- Complete BookletDocument8 pagesComplete BookletcreatelabNo ratings yet
- Arts Bots For PETECDocument34 pagesArts Bots For PETECcreatelabNo ratings yet
- Philippine Institute of Civil EngineersDocument4 pagesPhilippine Institute of Civil EngineersDaniel Laurence ItableNo ratings yet
- EE - GATE-2017 - Session-1 Question PaperDocument52 pagesEE - GATE-2017 - Session-1 Question Papersunny55krNo ratings yet
- National Conference Brochure 2017Document3 pagesNational Conference Brochure 2017skdwarakanathNo ratings yet
- Virtual ManufacturingDocument11 pagesVirtual ManufacturingAli Asghar MuzzaffarNo ratings yet
- EME Prospectus PDFDocument32 pagesEME Prospectus PDFAmmar Ajmal100% (1)
- IIT Delhi Prospectus 2015-16Document242 pagesIIT Delhi Prospectus 2015-16Shabeel HamNafNo ratings yet
- 1S00256Document2,413 pages1S00256Hitesh MatwaniNo ratings yet
- Elearning Systems Based On Cloud REVIEWDocument8 pagesElearning Systems Based On Cloud REVIEWEleni SfakianakiNo ratings yet
- Mechatronics - A Complete Career Path - Guide - Studying - Future - Jobs - EngineeringDocument4 pagesMechatronics - A Complete Career Path - Guide - Studying - Future - Jobs - Engineeringpremala61No ratings yet
- VL7202 IntroductionDocument33 pagesVL7202 IntroductionVENKINo ratings yet
- Oracle Database 12c New Features - Part 1Document17 pagesOracle Database 12c New Features - Part 1theahmadkhanNo ratings yet
- Erts Course Plan 2020Document13 pagesErts Course Plan 2020Ashok KumarNo ratings yet
- Is Political Science A ScienceDocument2 pagesIs Political Science A ScienceKevoNo ratings yet
- Advancing The Theory of Adaptive Structuration: The Development of A Scale To Measure Faithfulness of AppropriationDocument43 pagesAdvancing The Theory of Adaptive Structuration: The Development of A Scale To Measure Faithfulness of AppropriationSarniati AniNo ratings yet
- Executive Master in Computer ScienceDocument9 pagesExecutive Master in Computer SciencehmsohagNo ratings yet
- Radar Origin at NRL - 'New Eye For Navy' - AllisonDocument240 pagesRadar Origin at NRL - 'New Eye For Navy' - AllisonWilliam O'NeilNo ratings yet
- MS Computer Science - Mapua - CurriculumDocument3 pagesMS Computer Science - Mapua - CurriculumMhel ZamoraNo ratings yet
- Private & Confidential: Name DR Albert TAN Wee KwanDocument6 pagesPrivate & Confidential: Name DR Albert TAN Wee KwanAnonymous lTJcEAhVUNo ratings yet
- Tektelic Sensor System Engineering PositionDocument1 pageTektelic Sensor System Engineering PositionVivek SrivastavaNo ratings yet
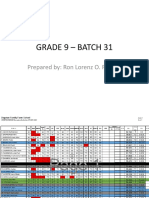
- Grade 9 - Batch 31: Prepared By: Ron Lorenz O. RocamoraDocument22 pagesGrade 9 - Batch 31: Prepared By: Ron Lorenz O. Rocamoradave magcawasNo ratings yet
- Topic: Study Credit Card Fraud As An Identity Threat.: Part A - Micro Project ProposalDocument3 pagesTopic: Study Credit Card Fraud As An Identity Threat.: Part A - Micro Project Proposal065. Shrihari KukadeNo ratings yet
- FDP On MoMDocument2 pagesFDP On MoMAfia S HameedNo ratings yet
- TP Seating - 13 - Nov ANDocument5 pagesTP Seating - 13 - Nov ANNitish KumarNo ratings yet
- SyllabusDocument3 pagesSyllabusMegha DurganNo ratings yet
- Troubleshooting: Library of Technical Reference BooksDocument4 pagesTroubleshooting: Library of Technical Reference BooksPablo Valenzuela ArredondoNo ratings yet
- DesignationDocument12 pagesDesignationzakibrant23No ratings yet
- Ajayjadhav - Cs18@rvce - Edu.in Marklist PDFDocument2 pagesAjayjadhav - Cs18@rvce - Edu.in Marklist PDFAjay JadhavNo ratings yet
- University of Engineering and Technology, LahoreDocument1 pageUniversity of Engineering and Technology, LahoreRashid JalalNo ratings yet