You might also like
- Smart Note TakerDocument21 pagesSmart Note TakerManogna KanthetiNo ratings yet
- Main ProDocument7 pagesMain ProManogna KanthetiNo ratings yet
- An ATM With An EYEDocument20 pagesAn ATM With An EYEManogna KanthetiNo ratings yet
- An ATM With An EYEDocument20 pagesAn ATM With An EYEManogna KanthetiNo ratings yet
- Obstacle Avoiding Robot With Vaccume CleanerDocument22 pagesObstacle Avoiding Robot With Vaccume CleanerManogna KanthetiNo ratings yet
- Obstacle Avoiding Robot With Vaccume CleanerDocument22 pagesObstacle Avoiding Robot With Vaccume CleanerManogna KanthetiNo ratings yet
- OarDocument27 pagesOarManogna KanthetiNo ratings yet
- ObstacleavoidancerobotDocument31 pagesObstacleavoidancerobotManogna KanthetiNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
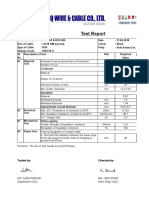
- Test Report: Tested By-Checked byDocument12 pagesTest Report: Tested By-Checked byjamilNo ratings yet
- USB-to - Serial RS-232 Hub USB-to - Serial RS-422/485 Hub: UC2322/UC2324/UC4852/UC4854Document1 pageUSB-to - Serial RS-232 Hub USB-to - Serial RS-422/485 Hub: UC2322/UC2324/UC4852/UC4854sitrakiniavoNo ratings yet
- Teaching Mathematics Content Through Explicit TeachingDocument39 pagesTeaching Mathematics Content Through Explicit Teachingronna drio100% (1)
- Module 2 DIPDocument33 pagesModule 2 DIPdigital loveNo ratings yet
- Introducing Eventstorming-4Document1 pageIntroducing Eventstorming-4Alex TrujilloNo ratings yet
- A. Premise Vs Conclusion NotesDocument8 pagesA. Premise Vs Conclusion NotesEmma PreciousNo ratings yet
- Risk Assessment For Harmonic Measurement Study ProcedureDocument13 pagesRisk Assessment For Harmonic Measurement Study ProcedureAnandu AshokanNo ratings yet
- HyperconnectivityDocument5 pagesHyperconnectivityramNo ratings yet
- Machine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDocument26 pagesMachine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDull PersonNo ratings yet
- 2021 Bookmatter BasicSciencesOfNuclearMedicineDocument12 pages2021 Bookmatter BasicSciencesOfNuclearMedicineBeatriz MartinhoNo ratings yet
- Aerated Concrete Production Using Various Raw MaterialsDocument5 pagesAerated Concrete Production Using Various Raw Materialskinley dorjee100% (1)
- Effect of IctDocument10 pagesEffect of IctRVID PhNo ratings yet
- RV900S - IB - Series 3Document28 pagesRV900S - IB - Series 3GA LewisNo ratings yet
- IA 05 Formal MethodsDocument5 pagesIA 05 Formal MethodsAuthierlys DomingosNo ratings yet
- Ahmed Amr P2Document8 pagesAhmed Amr P2Ahmed AmrNo ratings yet
- FS-C8025MFP Release NotesDocument22 pagesFS-C8025MFP Release NotesFirmware SM-SHNo ratings yet
- 2022 Summer Question Paper (Msbte Study Resources)Document4 pages2022 Summer Question Paper (Msbte Study Resources)Ganesh GopalNo ratings yet
- IFN 554 Week 3 Tutorial v.1Document19 pagesIFN 554 Week 3 Tutorial v.1kitkataus0711No ratings yet
- Case Study III - MichelinDocument15 pagesCase Study III - MichelinfreitzNo ratings yet
- In Search of Begum Akhtar PDFDocument42 pagesIn Search of Begum Akhtar PDFsreyas1273No ratings yet
- High Performance Vector Control SE2 Series InverterDocument9 pagesHigh Performance Vector Control SE2 Series InverterhanazahrNo ratings yet
- Content Analysis of Studies On Cpec Coverage: A Comparative Study of Pakistani and Chinese NewspapersDocument18 pagesContent Analysis of Studies On Cpec Coverage: A Comparative Study of Pakistani and Chinese NewspapersfarhanNo ratings yet
- BC 672772 RBRS Service TraningDocument385 pagesBC 672772 RBRS Service TraningTeknik Makina100% (2)
- Creative LibrarianDocument13 pagesCreative LibrarianulorNo ratings yet
- Kazi Shafikull IslamDocument3 pagesKazi Shafikull IslamKazi Shafikull IslamNo ratings yet
- Contoh Label Sensus 2022Document313 pagesContoh Label Sensus 2022Ajenk SablackNo ratings yet
- Sap EwmDocument2 pagesSap EwmsirivirishiNo ratings yet
- AZ 103T00A ENU TrainerHandbook PDFDocument403 pagesAZ 103T00A ENU TrainerHandbook PDFlongvietmt100% (2)
- Gilbert Cell Design PDFDocument22 pagesGilbert Cell Design PDFvysNo ratings yet
- Barack ObamaDocument3 pagesBarack ObamaVijay KumarNo ratings yet