You might also like
- Electrical MotorsDocument53 pagesElectrical MotorsMahesh100% (10)
- Lecture Notes-Basic Electrical and Electronics Engineering Notes PDFDocument30 pagesLecture Notes-Basic Electrical and Electronics Engineering Notes PDFMDR PRAPHU100% (1)
- Electrical Power and Machines - Application of Induction MotorsDocument15 pagesElectrical Power and Machines - Application of Induction MotorsDhanis ParamaguruNo ratings yet
- AC Motors and Control Options EbookDocument49 pagesAC Motors and Control Options EbookmunjaNo ratings yet
- Alternator Voltage Regulator With Droop CT Connections: DescriptionDocument4 pagesAlternator Voltage Regulator With Droop CT Connections: Descriptionمصطفئ العراقي AlfailyNo ratings yet
- Main Generator MaintenanceDocument9 pagesMain Generator MaintenanceAkli Djebbari100% (1)
- Electric Motors Drives Vol 4Document112 pagesElectric Motors Drives Vol 4matealoredana8015100% (5)
- Motors Drives Vol5 PDFDocument118 pagesMotors Drives Vol5 PDFIddy NgaziNo ratings yet
- Suzuki GSXS 1000 Manual Servicio Tecnico PDFDocument86 pagesSuzuki GSXS 1000 Manual Servicio Tecnico PDFRoberto Nicolás Mera Velásquez75% (8)
- Getting The Most From Your Electric MotorsDocument44 pagesGetting The Most From Your Electric MotorsIdhamtanahbaruNo ratings yet
- Overview of The Nigerian Oil and Gas IndustryDocument39 pagesOverview of The Nigerian Oil and Gas Industryneocentricgenius100% (4)
- Effect of Repair Rewinding On Motor Efficiency - OptimisedDocument82 pagesEffect of Repair Rewinding On Motor Efficiency - OptimisedAkmal Radiansyah100% (1)
- Bts GeneratorsDocument53 pagesBts Generatorsmohsinaliqureshi02No ratings yet
- Electrical Machines and Drives An Introduction To Principles and CharacteristicsDocument267 pagesElectrical Machines and Drives An Introduction To Principles and CharacteristicsJules Nikko Dela Cruz67% (3)
- Book Electrical MachinesDocument695 pagesBook Electrical MachinesUchiha ItachiNo ratings yet
- Design of Rotating Electrical Machines2Document531 pagesDesign of Rotating Electrical Machines2alirozNo ratings yet
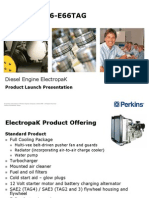
- 1106-E66TAG Sales PresentationDocument13 pages1106-E66TAG Sales Presentationakheel201No ratings yet
- Ivanov - Smolensky-Electrical Machines, Vol. 2Document466 pagesIvanov - Smolensky-Electrical Machines, Vol. 2elmer100% (3)
- Introduction To IC EnginesDocument43 pagesIntroduction To IC Engineswlkngs87No ratings yet
- Three Phase Induction Motor ExperimentDocument21 pagesThree Phase Induction Motor ExperimentKarthik GanjiNo ratings yet
- Induction Motors - Modelling and ControlDocument558 pagesInduction Motors - Modelling and ControlCesar CarácterNo ratings yet
- Direct Torque Control InductionDocument9 pagesDirect Torque Control InductiononafetsNo ratings yet
- Power ElectronicsDocument28 pagesPower Electronicspavan96100% (5)
- 02 Intro To FOCDocument55 pages02 Intro To FOCRam Krishan SharmaNo ratings yet
- Como Sobreviver A Um Apocalipse ZumbiDocument30 pagesComo Sobreviver A Um Apocalipse ZumbirejaneNo ratings yet
- Physics: OxfordDocument224 pagesPhysics: OxfordMusic Life100% (1)
- Problems in the Design and Development of 750 MW Turbogenerators: International Series of Monographs on Electronics and InstrumentationFrom EverandProblems in the Design and Development of 750 MW Turbogenerators: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Online Monitoring DevicesDocument17 pagesOnline Monitoring Devicesyogi_swarnNo ratings yet
- Gas Control Systems Lebw4982Document44 pagesGas Control Systems Lebw4982Miguel PerezNo ratings yet
- Maintenance of Motors and GeneratorsDocument116 pagesMaintenance of Motors and GeneratorsAtiqur RahmanNo ratings yet
- Excitation Systems: This Material Should Not Be Used Without The Author's ConsentDocument31 pagesExcitation Systems: This Material Should Not Be Used Without The Author's ConsentSudar WadiNo ratings yet
- Commissioning Dept.: Power Systems DivisionDocument84 pagesCommissioning Dept.: Power Systems DivisionMohamed Hamdallah100% (1)
- Power Electronics Principles Power ElectDocument67 pagesPower Electronics Principles Power Electkibrom atsbhaNo ratings yet
- Biblio MotorsDocument11 pagesBiblio MotorsMuhammad KaleemNo ratings yet
- Scheduled Maintenance Guide: Every DayDocument58 pagesScheduled Maintenance Guide: Every DayGautam ChapagainNo ratings yet
- MotorsDocument36 pagesMotorsscorpionarnold100% (1)
- Leed For Operations and Maintenance Reference Guide Introduction PDFDocument20 pagesLeed For Operations and Maintenance Reference Guide Introduction PDFjopaypagasNo ratings yet
- Auto Synchronizing 6200 SeriesDocument2 pagesAuto Synchronizing 6200 SeriesJawid YousofNo ratings yet
- Power Engineering Guide: Transmission and DistributionDocument12 pagesPower Engineering Guide: Transmission and DistributionFarhan ShahNo ratings yet
- EPT12 EZ Error CodesDocument5 pagesEPT12 EZ Error CodesKiều Văn TrungNo ratings yet
- Fundamentals of Refining and Petrochemicals ProcessesDocument263 pagesFundamentals of Refining and Petrochemicals ProcessesneocentricgeniusNo ratings yet
- Vector AC ControlDocument117 pagesVector AC Controltarx441No ratings yet
- Design of Induction Motors PDFDocument108 pagesDesign of Induction Motors PDFMaverick Naidu100% (3)
- Electrical Machine and Control II, EP-52014Document33 pagesElectrical Machine and Control II, EP-52014Kyaw LayNo ratings yet
- Norshore Drill Ship Presentation 1113Document34 pagesNorshore Drill Ship Presentation 1113Grand PappyNo ratings yet
- Electric PV PPT New3Document32 pagesElectric PV PPT New3Anushka PagalNo ratings yet
- Clarke TransformationsDocument46 pagesClarke TransformationsPasupuleti SivakumarNo ratings yet
- Essentials of Economics, 10th Edition (2016)Document468 pagesEssentials of Economics, 10th Edition (2016)Luis EstradaNo ratings yet
- Bars, Rods & RebarsDocument8 pagesBars, Rods & Rebarspankaj tyagiNo ratings yet
- 3bdd016540-En A001 PDFDocument12 pages3bdd016540-En A001 PDFAnonymous cPzveVRHINo ratings yet
- Terminal Overview SystecDocument2 pagesTerminal Overview SystecVentas PesamaticIndustrialNo ratings yet
- Electrical Machine Topologies - Hottest Topics in The Electrical Machine Research Community PDFDocument13 pagesElectrical Machine Topologies - Hottest Topics in The Electrical Machine Research Community PDFRaymond ParlindunganNo ratings yet
- Workshop On Industrial PneumaticsDocument44 pagesWorkshop On Industrial Pneumaticsvinaytuli 1515No ratings yet
- Electric Motor PresentationDocument19 pagesElectric Motor Presentationupendra35No ratings yet
- (MD Zahurul Haq) Applied Measurement SystemDocument399 pages(MD Zahurul Haq) Applied Measurement SystemLaraSamiNo ratings yet
- Direct Torque ControlDocument4 pagesDirect Torque Controlsanthurupesh0% (1)
- AC Motors LessonDocument50 pagesAC Motors LessonTracy Baptiste100% (1)
- Leroy Somer - AlternatorsDocument12 pagesLeroy Somer - AlternatorsRWBalmeloNo ratings yet
- Dokumen - Pub - Training Manual For Industrial Training Institutes Part 1 3nbsped 9351341577 9789351341574Document260 pagesDokumen - Pub - Training Manual For Industrial Training Institutes Part 1 3nbsped 9351341577 9789351341574Shahriar H DiptoNo ratings yet
- Operation and Application of PLC With Ladder DiagramDocument9 pagesOperation and Application of PLC With Ladder DiagramYuva Raj50% (2)
- Basics of Electrical Machine DesignDocument7 pagesBasics of Electrical Machine DesignvirenpandyaNo ratings yet
- Bearing Current in VFD Fed MotorDocument24 pagesBearing Current in VFD Fed Motormarn-in2501No ratings yet
- 1.01.1 Large Generators en WebDocument16 pages1.01.1 Large Generators en WebEvangelos TsampourisNo ratings yet
- Scalar and Vector Control of IM DriveDocument9 pagesScalar and Vector Control of IM DriveLasitha Dananjaya RanawakkageNo ratings yet
- Electric GeneratorDocument7 pagesElectric GeneratorRahul ShivuNo ratings yet
- Unit 3Document52 pagesUnit 3kishorghatage89No ratings yet
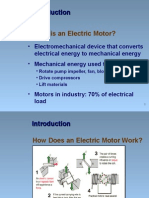
- What Is An Electric Motor?: - Electromechanical Device That Converts - Mechanical Energy Used To E.GDocument37 pagesWhat Is An Electric Motor?: - Electromechanical Device That Converts - Mechanical Energy Used To E.GRaja RamNo ratings yet
- Lecture Seven - Electrical MotorsDocument91 pagesLecture Seven - Electrical Motorsnickokinyunyu11No ratings yet
- Types of MotorDocument25 pagesTypes of MotorClamentNo ratings yet
- Electric MachineDocument45 pagesElectric MachineravihbtiNo ratings yet
- Homework I EVMDocument3 pagesHomework I EVMneocentricgeniusNo ratings yet
- Refining Model AnswersDocument6 pagesRefining Model AnswersneocentricgeniusNo ratings yet
- Tutorials On Lesson 3 - 5Document10 pagesTutorials On Lesson 3 - 5neocentricgeniusNo ratings yet
- World Oil/Gas Reserves: Future Supply & Prospects: NOV 2012 FSTP Class DDocument22 pagesWorld Oil/Gas Reserves: Future Supply & Prospects: NOV 2012 FSTP Class DneocentricgeniusNo ratings yet
- Thermofluids SummaryDocument6 pagesThermofluids SummaryneocentricgeniusNo ratings yet
- Technical ReportDocument12 pagesTechnical ReportneocentricgeniusNo ratings yet
- Geothermal AlternativeDocument14 pagesGeothermal AlternativeneocentricgeniusNo ratings yet
- Smpling - Storage - Transportation - Installation ProcedureDocument75 pagesSmpling - Storage - Transportation - Installation ProcedurePaddyNo ratings yet
- Alba C45H INGLES-01 User ManualDocument21 pagesAlba C45H INGLES-01 User ManualdrmassterNo ratings yet
- 5 Electricity - With GRESADocument15 pages5 Electricity - With GRESADianne CalladaNo ratings yet
- IAEA Fukushima Remediation Final - Report151111Document81 pagesIAEA Fukushima Remediation Final - Report151111EnformableNo ratings yet
- 1,917 New Applications in New Spark Plug & Glow Plug CatalogueDocument6 pages1,917 New Applications in New Spark Plug & Glow Plug Catalogue08088338No ratings yet
- Fire Issue: BNBC 2006 and BNBC 2017 (Upcoming) PDFDocument3 pagesFire Issue: BNBC 2006 and BNBC 2017 (Upcoming) PDFSayemAbusadat100% (1)
- Rigo 2012Document11 pagesRigo 2012saeedNo ratings yet
- Organic Light Emitting Transistor (OLET)Document7 pagesOrganic Light Emitting Transistor (OLET)Alvin FarizNo ratings yet
- Pipe Flow Rate MeasurementDocument7 pagesPipe Flow Rate MeasurementSyed Osama MunibNo ratings yet
- Unit - 3 Solar Photovoltaic SystemDocument15 pagesUnit - 3 Solar Photovoltaic SystemSudhir MallampatiNo ratings yet
- Operating Instructions: DishwasherDocument20 pagesOperating Instructions: DishwasherpetrushinNo ratings yet
- Low-Voltage Halogen Lamps Without Reflector: Product Family DatasheetDocument13 pagesLow-Voltage Halogen Lamps Without Reflector: Product Family DatasheetparasprrmNo ratings yet
- Progress of PV Cell TechnologyDocument17 pagesProgress of PV Cell TechnologysriNo ratings yet
- AQA PHYA2 W Specimen PaperDocument13 pagesAQA PHYA2 W Specimen Paper04rchoudNo ratings yet
- How To Differentiate Capacitances Using Trasatti and Dunn MethodsDocument56 pagesHow To Differentiate Capacitances Using Trasatti and Dunn Methodsgopi undavalliNo ratings yet
- Cambridge International Examinations: Chemistry 9701/42 March 2017Document12 pagesCambridge International Examinations: Chemistry 9701/42 March 2017Sumaira AliNo ratings yet
- Ii 2G Ex D Iic T6 GB Cesi 03 Atex 323 X: Sonde A Transmetteur 4÷20ma Pour Gaz InflammablesDocument10 pagesIi 2G Ex D Iic T6 GB Cesi 03 Atex 323 X: Sonde A Transmetteur 4÷20ma Pour Gaz Inflammablesdewidewi76No ratings yet
- Identifying and Recording Piping Locations: 6.1.10.6 Localized RepairsDocument10 pagesIdentifying and Recording Piping Locations: 6.1.10.6 Localized RepairsEphrem GizachewNo ratings yet
- Ali 2018Document6 pagesAli 2018rosendo rojas barraganNo ratings yet
- CF750Document9 pagesCF750Shilpi VirmaniNo ratings yet
- 3tf ContactorDocument25 pages3tf Contactorpadminitt100% (1)
- Manual Inversor Powest All in One 3 y 5kva On GridDocument50 pagesManual Inversor Powest All in One 3 y 5kva On GridOrlando Suarez CabreraNo ratings yet