You might also like
- Control Systems Formula SheetDocument12 pagesControl Systems Formula SheetliamhrNo ratings yet
- Signal Processing Assignment: Donald Carr May 18, 2005Document39 pagesSignal Processing Assignment: Donald Carr May 18, 2005sshebiNo ratings yet
- (A305) Otomatik Kontrol Ders Notu (Slayt)Document27 pages(A305) Otomatik Kontrol Ders Notu (Slayt)Mücahit Ezel100% (1)
- Unit Iv: Normalized Ideal Low-Pass Filter H (jω) = eDocument37 pagesUnit Iv: Normalized Ideal Low-Pass Filter H (jω) = eSamhithaNo ratings yet
- ME2142 Tut 2 SolnDocument8 pagesME2142 Tut 2 SolnLakshmi Balasubramaniam100% (1)
- TMM - Chapter 2Document18 pagesTMM - Chapter 2Ahmed AhmedNo ratings yet
- DESIGN OF MACHINERY - Problem 4-18gDocument2 pagesDESIGN OF MACHINERY - Problem 4-18gGiordano VieiraNo ratings yet
- Trig Cheat Sheet: Definition of The Trig FunctionsDocument4 pagesTrig Cheat Sheet: Definition of The Trig FunctionsMihir SethiNo ratings yet
- Formula Sheet - New Zealand Level 3 Calculus (2009)Document4 pagesFormula Sheet - New Zealand Level 3 Calculus (2009)naedkcinNo ratings yet
- Forward KinematicsDocument4 pagesForward KinematicsZafer Gök100% (1)
- Some Important Formulae, Definitions and Results in MathematicsDocument12 pagesSome Important Formulae, Definitions and Results in Mathematicsparchure123100% (1)
- Axial, Radial TurbinesDocument91 pagesAxial, Radial TurbinesAkshay Deshpande100% (2)
- Calculus 2 SummaryDocument2 pagesCalculus 2 Summarydukefvr41No ratings yet
- Function Part 2Document40 pagesFunction Part 2Muhd HafidzNo ratings yet
- TrigonometryDocument23 pagesTrigonometryTitis PohanNo ratings yet
- Ce1 Diff - CalculusDocument8 pagesCe1 Diff - Calculuslakr lamaNo ratings yet
- 446-07 Soln of DEs (N) - HandoutDocument8 pages446-07 Soln of DEs (N) - HandoutFrancisco HurtadoNo ratings yet
- DQ TransformationDocument51 pagesDQ Transformationसुमित नेमा50% (2)
- DQ TransformationDocument51 pagesDQ TransformationAili LuggymixNo ratings yet
- Transistor OsicllatorsDocument47 pagesTransistor OsicllatorsMohammad Gulam AhamadNo ratings yet
- Boise State University Department of Electrical and Computer Engineering ECE 225 Circuit Analysis and Design Spring 2010Document6 pagesBoise State University Department of Electrical and Computer Engineering ECE 225 Circuit Analysis and Design Spring 2010Matthew DolanNo ratings yet
- Tutorial - Math.lamar - Edu PDF Trig Cheat Sheet ReducedDocument2 pagesTutorial - Math.lamar - Edu PDF Trig Cheat Sheet ReducedAnonymous vyXcR9No ratings yet
- Trig Cheat Sheet ReducedDocument2 pagesTrig Cheat Sheet ReducedMritunjay KumarNo ratings yet
- Trigonometry Condensed Formula SheetDocument2 pagesTrigonometry Condensed Formula SheetRiza Azari0% (1)
- 1910 Formula PacketDocument4 pages1910 Formula PacketJNo ratings yet
- Trig Cheat Sheet: Formulas and IdentitiesDocument2 pagesTrig Cheat Sheet: Formulas and IdentitiesMuzamilNo ratings yet
- Lecture9b Discontinuous SystemsDocument37 pagesLecture9b Discontinuous SystemsChernet TugeNo ratings yet
- AE 321 - Solution of Homework #5: (5×5 25 POINTS)Document9 pagesAE 321 - Solution of Homework #5: (5×5 25 POINTS)Arthur DingNo ratings yet
- Distributed Arithmetic: Implementations and Applications: A TutorialDocument30 pagesDistributed Arithmetic: Implementations and Applications: A Tutorialmurlak37No ratings yet
- Rules For Making Bode Plots: Term Magnitude PhaseDocument4 pagesRules For Making Bode Plots: Term Magnitude PhaseRaufzha AnandaNo ratings yet
- Process Dynamics and Control, Ch. 8 Solution ManualDocument12 pagesProcess Dynamics and Control, Ch. 8 Solution ManualBen SpearmanNo ratings yet
- Maths FormulaDocument4 pagesMaths Formulamickey_disney93No ratings yet
- A Comparison Study of The Numerical Integration Methods in The Trajectory Tracking Application of Redundant Robot ManipulatorsDocument21 pagesA Comparison Study of The Numerical Integration Methods in The Trajectory Tracking Application of Redundant Robot ManipulatorsEmre SarıyıldızNo ratings yet
- 2nd ASSIGNMENTDocument15 pages2nd ASSIGNMENTNazenin GüreNo ratings yet
- Winter Ap Quiz One AnswersDocument3 pagesWinter Ap Quiz One AnswersteachopensourceNo ratings yet
- Trigonometry FormulaesDocument7 pagesTrigonometry FormulaesAshutosh AnandNo ratings yet
- Assignment 2Document6 pagesAssignment 2Kalpit AgarwalNo ratings yet
- Trig Cheat Sheet ReducedDocument2 pagesTrig Cheat Sheet ReducedPhirak KhimNo ratings yet
- Modeling and Simulation of RLC Circuit (Band Pass Filter)Document25 pagesModeling and Simulation of RLC Circuit (Band Pass Filter)elneelNo ratings yet
- 2020 CAT - It - S SolutionDocument5 pages2020 CAT - It - S SolutionhillaryNo ratings yet
- Problem 2) 2000 Cos (10) ( : T AvgDocument8 pagesProblem 2) 2000 Cos (10) ( : T AvgSova ŽalosnaNo ratings yet
- EquationsDocument17 pagesEquationshasanmt23100% (1)
- CHAP2Document45 pagesCHAP2黃聖傑No ratings yet
- A6 SolutionDocument8 pagesA6 SolutionRaja KumarNo ratings yet
- Mathematical Modeling of Mechanical Systems and Electrical SystemsDocument49 pagesMathematical Modeling of Mechanical Systems and Electrical SystemsMary DunhamNo ratings yet
- Che 149 Part 2 Internal GenerationDocument39 pagesChe 149 Part 2 Internal GenerationForest ErmitaNo ratings yet
- Krispay FinalDocument9 pagesKrispay FinalSayaf KhanNo ratings yet
- Kinematics Robot Control: (2DOF Manipulator & Mobile Robot) (2DOF Manipulator & Mobile Robot)Document14 pagesKinematics Robot Control: (2DOF Manipulator & Mobile Robot) (2DOF Manipulator & Mobile Robot)muhammad_wafi_6No ratings yet
- Estabilidad Interna y Entrada-Salida de Sistemas Continuos: Udec - DieDocument10 pagesEstabilidad Interna y Entrada-Salida de Sistemas Continuos: Udec - DieagustinpinochetNo ratings yet
- 365 Spectrum AnalysisDocument19 pages365 Spectrum AnalysisSunilkumar ReddyNo ratings yet
- A Sufficient Condition For Entrainment of A Van-der-Pol Oscillator Resistively Coupled To A Fixed Voltage InputDocument8 pagesA Sufficient Condition For Entrainment of A Van-der-Pol Oscillator Resistively Coupled To A Fixed Voltage InputmalaysiatotoNo ratings yet
- Metode RombergDocument37 pagesMetode RombergBhidaraNo ratings yet
- Trig Cheat SheetDocument4 pagesTrig Cheat Sheetapi-284574585No ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- Atm3 4 2005 Klancar 155 163Document9 pagesAtm3 4 2005 Klancar 155 163Rubén GonzálezNo ratings yet
- ANSYS Tutorial: Jake Blanchard January 2008Document24 pagesANSYS Tutorial: Jake Blanchard January 2008Joan HeviaNo ratings yet
- BID 2011 Lecture2 Getting Bio-InspiredDocument6 pagesBID 2011 Lecture2 Getting Bio-InspiredRubén GonzálezNo ratings yet
- FeaDocument1 pageFeaRubén GonzálezNo ratings yet
- FeaDocument1 pageFeaRubén GonzálezNo ratings yet
- FeaDocument1 pageFeaRubén GonzálezNo ratings yet
- Airpenguin enDocument4 pagesAirpenguin enRubén GonzálezNo ratings yet
- NUST 1 IntroductionDocument102 pagesNUST 1 IntroductionRubén GonzálezNo ratings yet
- 40 Mejores Del Heavy MetalDocument1 page40 Mejores Del Heavy MetalRubén GonzálezNo ratings yet
- Propert 447-445Document11 pagesPropert 447-445LUNA100% (1)
- Binet Kamat Test For General Mental AbilitiesDocument54 pagesBinet Kamat Test For General Mental AbilitiesSana Siddiq100% (14)
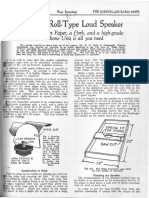
- Simple Roll-Type: A Loud SpeakerDocument1 pageSimple Roll-Type: A Loud SpeakerEudes SilvaNo ratings yet
- Index PDFDocument159 pagesIndex PDFHüseyin IşlakNo ratings yet
- Army Aviation Digest - Nov 1978Document52 pagesArmy Aviation Digest - Nov 1978Aviation/Space History Library100% (1)
- Report - IvatanDocument28 pagesReport - IvatanJohara Winel PerezNo ratings yet
- The Wilson Quarterly: The World's New Numbers by Martin WalkerDocument13 pagesThe Wilson Quarterly: The World's New Numbers by Martin WalkerDavid WeekNo ratings yet
- Nicholas Hudson - From Nation To Race: The Origin of Racial Classification in Eighteenth-CenturyDocument19 pagesNicholas Hudson - From Nation To Race: The Origin of Racial Classification in Eighteenth-CenturyPedro IINo ratings yet
- Drug Study LidocaineDocument15 pagesDrug Study LidocaineFrancym R. BatengaNo ratings yet
- L2 Biostatistics ProbabilityDocument84 pagesL2 Biostatistics ProbabilityAaron CiudadNo ratings yet
- Overall Method StatementDocument33 pagesOverall Method Statementsaranga100% (1)
- Viscous Fluid Flow Frank M White Third Edition - Compress PDFDocument4 pagesViscous Fluid Flow Frank M White Third Edition - Compress PDFDenielNo ratings yet
- By This Axe I Rule!Document15 pagesBy This Axe I Rule!storm0% (1)
- Abnormalities of Placenta, Amniotic Fluid and Cord: Prepared By, B. Ezhilarasi, Nursing TutorDocument21 pagesAbnormalities of Placenta, Amniotic Fluid and Cord: Prepared By, B. Ezhilarasi, Nursing TutorGopala KrishnanNo ratings yet
- 2 Contoh Narative TextDocument9 pages2 Contoh Narative TextRini RienzNo ratings yet
- Material Requirement Planning (MRP)Document55 pagesMaterial Requirement Planning (MRP)Lisa CarlsonNo ratings yet
- BTK Implant Guide SurgeryDocument48 pagesBTK Implant Guide SurgeryMaria VolvinaNo ratings yet
- Antoine Constants PDFDocument3 pagesAntoine Constants PDFsofiaNo ratings yet
- Superposition and Statically Indetermina - GDLCDocument25 pagesSuperposition and Statically Indetermina - GDLCAnonymous frFFmeNo ratings yet
- Assignment 4 SolutionsDocument9 pagesAssignment 4 SolutionsNengke Lin100% (2)
- ME 352 Design of Machine Elements: Lab ReportDocument5 pagesME 352 Design of Machine Elements: Lab ReportKeshav VermaNo ratings yet
- ANS: (2.59807m/s2 Horizontal) (1.5m/s2 Vertical) (12.93725 Degree Angle That The Water Surface Makes With The Horizontal)Document5 pagesANS: (2.59807m/s2 Horizontal) (1.5m/s2 Vertical) (12.93725 Degree Angle That The Water Surface Makes With The Horizontal)Lolly UmaliNo ratings yet
- Physics 101Document21 pagesPhysics 101Kuna KunavathiNo ratings yet
- Time Value of Money LectureDocument54 pagesTime Value of Money LectureRanin, Manilac Melissa SNo ratings yet
- Lc420euf Sda1 LGDocument41 pagesLc420euf Sda1 LGjavierNo ratings yet
- SSCNC Turning Tutorial ModDocument18 pagesSSCNC Turning Tutorial ModYudho Parwoto Hadi100% (1)
- Maths All FormulasDocument5 pagesMaths All FormulasVishnuNo ratings yet
- Kuiz1 210114Document12 pagesKuiz1 210114Vincent HoNo ratings yet
- Present Simple TaskDocument3 pagesPresent Simple TaskMaria AlejandraNo ratings yet
- Future AncestorsDocument44 pagesFuture AncestorsAlex100% (1)