You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
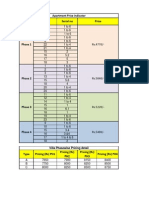
- Price Indicator 21st OctDocument1 pagePrice Indicator 21st OctLakshmikanth MeduriNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- High-Definition Multimedia InterfaceDocument276 pagesHigh-Definition Multimedia Interfacegusman_dpNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- DFT SomeDocument79 pagesDFT SomeBhai BaiNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Transaction Level Visual DebuggingDocument27 pagesTransaction Level Visual DebuggingLakshmikanth MeduriNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- High-Definition Multimedia InterfaceDocument276 pagesHigh-Definition Multimedia Interfacegusman_dpNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Ovm VS UvmDocument12 pagesOvm VS UvmLakshmikanth MeduriNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- DDR ControllerDocument30 pagesDDR ControllerLakshmikanth MeduriNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- High-Definition Multimedia InterfaceDocument276 pagesHigh-Definition Multimedia Interfacegusman_dpNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Connection GuideDocument56 pagesConnection GuideLakshmikanth MeduriNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Technical Introduction To USB 2.0Document6 pagesA Technical Introduction To USB 2.0Sumeet KalraNo ratings yet
- 9 - Metastability and Clock Recovery Asynchronous InputsDocument9 pages9 - Metastability and Clock Recovery Asynchronous InputsrzunigaNo ratings yet
- Mult Logic OptDocument52 pagesMult Logic OptLakshmikanth MeduriNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Sequential Circuits: March 28, 2006 1Document12 pagesSequential Circuits: March 28, 2006 1Lakshmikanth MeduriNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Test Your Verilog Skills 1Document44 pagesTest Your Verilog Skills 1Lakshmikanth MeduriNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Analysis of Case StatementsDocument9 pagesAnalysis of Case StatementshypernuclideNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Finite State Machines: by Mike ChenDocument25 pagesFinite State Machines: by Mike ChenKulwant NagiNo ratings yet
- Review of Electrical Sensors and ActuatorsDocument21 pagesReview of Electrical Sensors and ActuatorsManjula Udayanga HemapalaNo ratings yet
- False PathDocument7 pagesFalse PathLakshmikanth MeduriNo ratings yet
- Static Timing AnalysisDocument19 pagesStatic Timing AnalysisJagadeesan JayachandranNo ratings yet
- VHDL TutorialDocument21 pagesVHDL Tutorialkamarisamy0% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- LT Spice ExperimentsDocument15 pagesLT Spice ExperimentsSachin George ThomasNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Lec05 PDFDocument6 pagesLec05 PDFbiswajitntpcNo ratings yet
- Optimized 40-character title for schematic document sectionsDocument73 pagesOptimized 40-character title for schematic document sectionsOwen Barnes100% (1)
- VHF and UHF Narrowbanding - Your Complete Guide To Meet The DeadlineDocument109 pagesVHF and UHF Narrowbanding - Your Complete Guide To Meet The DeadlineTopcom Toki-VokiNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Spintronics Based Random Access Memory: A ReviewDocument19 pagesSpintronics Based Random Access Memory: A ReviewAgtc TandayNo ratings yet
- 15.6Document31 pages15.6Recep TOSUNNo ratings yet
- Programador AVR PDFDocument7 pagesProgramador AVR PDFGustavoFloresNo ratings yet
- BOM-speeduino v0.4.3 Compatible PCB For M50tu Rev2.1Document1 pageBOM-speeduino v0.4.3 Compatible PCB For M50tu Rev2.1Dimitar TenchevNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- PM5100 User GuideDocument96 pagesPM5100 User GuideGerson ChavarriaNo ratings yet
- P4m90-M7a P4M89-M7B 0611CDocument47 pagesP4m90-M7a P4M89-M7B 0611CEscri Thor MentaNo ratings yet
- Microprocessors Lab ManualDocument114 pagesMicroprocessors Lab ManualMalk MalikNo ratings yet
- Logic Circuit Design Lab Manual1 - 2 PDFDocument61 pagesLogic Circuit Design Lab Manual1 - 2 PDFAkhil Kumar SNo ratings yet
- Eee-V-linear Ics and Applications (10ee56) - NotesDocument132 pagesEee-V-linear Ics and Applications (10ee56) - NotesSai Prasanna JandhyalaNo ratings yet
- Indian Railway Standard for Universal Fail-Safe Block InterfaceDocument29 pagesIndian Railway Standard for Universal Fail-Safe Block Interfacema_purwoadiNo ratings yet
- Week 11 - Module 9 Sequential Logic CircuitsDocument12 pagesWeek 11 - Module 9 Sequential Logic CircuitsBen GwenNo ratings yet
- Lab No. 2 Title: Simulating Opamp Circuit Transient Response in Pspice To Verify The Gain of The CircuitDocument10 pagesLab No. 2 Title: Simulating Opamp Circuit Transient Response in Pspice To Verify The Gain of The Circuitlearner guyNo ratings yet
- Android Phone Controlled Spy RobotDocument4 pagesAndroid Phone Controlled Spy RobotInternational Journal of Innovative Science and Research Technology100% (1)
- FM Transmitter ManualDocument238 pagesFM Transmitter ManualWilliam EatonNo ratings yet
- 568C3 OverviewDocument15 pages568C3 OverviewchioutedNo ratings yet
- @3 FET FundamentalsDocument210 pages@3 FET Fundamentalschâu nguyễn ngọcNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 120542A Manual Instalación Antenas HDTF - Es PDFDocument2 pages120542A Manual Instalación Antenas HDTF - Es PDFCarloMagnoCurtisNo ratings yet
- State Forest Service Exam Electronics KeyDocument83 pagesState Forest Service Exam Electronics KeyDeepak YugaNo ratings yet
- TemperatureDocument128 pagesTemperaturemakacoNo ratings yet
- S1 Uvr2Document1 pageS1 Uvr2Sindhu PandreNo ratings yet
- Next Generation Submarine Network - Innovative Repeater TechnologyDocument3 pagesNext Generation Submarine Network - Innovative Repeater TechnologySunnyNo ratings yet
- Office Call Monitoring SystemDocument3 pagesOffice Call Monitoring SystemhunnbajajNo ratings yet
- EX3G HMI PLC All-in-One User Manual Specs and DimensionsDocument2 pagesEX3G HMI PLC All-in-One User Manual Specs and DimensionsMarcos Luiz AlvesNo ratings yet
- Fujitsu Esprimo X923 Desktop PC: Data SheetDocument8 pagesFujitsu Esprimo X923 Desktop PC: Data Sheetconmar5mNo ratings yet
- Precision Echosounder for Easy Hydrographic SurveyDocument13 pagesPrecision Echosounder for Easy Hydrographic SurveyMujahid SukarnoNo ratings yet
- 8051 Microcontroller Book PDFDocument26 pages8051 Microcontroller Book PDFswati pasiNo ratings yet