You might also like
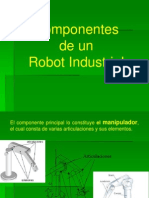
- 2 Componentes de Un Robot IndustrialDocument26 pages2 Componentes de Un Robot IndustrialJorge L. Aguilar Martínez100% (1)
- Operacion de Robots CRSDocument46 pagesOperacion de Robots CRSJorge L. Aguilar MartínezNo ratings yet
- Fines y Valores en EducacionDocument21 pagesFines y Valores en EducacionJorge L. Aguilar MartínezNo ratings yet
- Retención o EnclavamientoDocument1 pageRetención o EnclavamientoJorge L. Aguilar MartínezNo ratings yet
- Manual de Asignatura PLC 2Document24 pagesManual de Asignatura PLC 2Jorge L. Aguilar MartínezNo ratings yet
- Manual de Asignatura PLCDocument14 pagesManual de Asignatura PLCJorge L. Aguilar MartínezNo ratings yet
- 1 Fundamentos y Conceptos de La RoboticaDocument40 pages1 Fundamentos y Conceptos de La RoboticaJorge L. Aguilar MartínezNo ratings yet
- Taller n3 ReseñaDocument12 pagesTaller n3 ReseñaAmada AcostaNo ratings yet
- Ejercicios de TrigonometríaDocument3 pagesEjercicios de TrigonometríaHumberto LopezNo ratings yet
- 3.6 Plan de Vigilancia UbsDocument43 pages3.6 Plan de Vigilancia UbsChala Paroy JavierNo ratings yet
- Guía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - La Identificación de Los INCOTERMS y La Distribución Fisica InternacionalDocument8 pagesGuía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - La Identificación de Los INCOTERMS y La Distribución Fisica Internacionalangel lopezzNo ratings yet
- Clase 05 PDFDocument1 pageClase 05 PDFalexander hermoxzaNo ratings yet
- La Ceramica en El Arte Griego - Historia Del Arte en ResumenDocument5 pagesLa Ceramica en El Arte Griego - Historia Del Arte en ResumenXimena GattoNo ratings yet
- DECRETO 3112 DE 1997 - Habilitación y Prestación de Servicio Transporte FluvialDocument17 pagesDECRETO 3112 DE 1997 - Habilitación y Prestación de Servicio Transporte FluvialMelissa ScottNo ratings yet
- Alvaro Figueroa COntrol3Document9 pagesAlvaro Figueroa COntrol3Alvaro Figueroa100% (2)
- Esquema Desarrollo Evolutivo NiñosDocument4 pagesEsquema Desarrollo Evolutivo NiñosLety GonzálezNo ratings yet
- Reparación de Frenos HidráulicosDocument128 pagesReparación de Frenos HidráulicosNoeramos100% (1)
- Qué Se Entiende Por PolíticaDocument4 pagesQué Se Entiende Por PolíticaLucasPeraltaNo ratings yet
- Solucionariosantillana4°2015 2016Document128 pagesSolucionariosantillana4°2015 2016Agustin Padilla Davalos81% (21)
- AlcalinidadDocument18 pagesAlcalinidadRogerCárdenasNo ratings yet
- Cobertura Curricular 2018Document14 pagesCobertura Curricular 2018Claudina Alicia Inostroza Salazar100% (1)
- Cálculo Del GoteoDocument1 pageCálculo Del Goteovane4100% (1)
- 2dogrado - Lengua y Matematica - m1Document46 pages2dogrado - Lengua y Matematica - m1Alan FernandezNo ratings yet
- EXPOMATEDocument1 pageEXPOMATELYAN SEBASTIAN ROJAS VERANo ratings yet
- Cuadro de Analisis de 3 AutoresDocument2 pagesCuadro de Analisis de 3 AutoresEdgar ArmentaNo ratings yet
- LOZANO MANCHA JONATHAN ABISAI - Actividad 1Document11 pagesLOZANO MANCHA JONATHAN ABISAI - Actividad 1Lozano Mancha JonathanNo ratings yet
- Cuarto Frio para La Conservacion RosasDocument15 pagesCuarto Frio para La Conservacion RosasfxbricoNo ratings yet
- Entre El Valor Publico y El Valor PrivadoDocument52 pagesEntre El Valor Publico y El Valor Privadoidelin.molinasNo ratings yet
- Norma Jurídica y Su EstructuraDocument14 pagesNorma Jurídica y Su EstructuraMartin CoyNo ratings yet
- Trabajo Práctico Integrador Ciencias SocialesDocument12 pagesTrabajo Práctico Integrador Ciencias SocialesAlexisNo ratings yet
- Encantamiento Del SueñoDocument19 pagesEncantamiento Del SueñoJavier CastilloNo ratings yet
- Ensayo Capítulo - El Cerebro - Aslhy BracamonteDocument3 pagesEnsayo Capítulo - El Cerebro - Aslhy BracamonteaslhymbhNo ratings yet
- Dinamica Virtual Segunda Ley de NewtonDocument6 pagesDinamica Virtual Segunda Ley de NewtonJose Manuel Martinez JimenezNo ratings yet
- Nutresa Def 2017Document13 pagesNutresa Def 2017Ariana RodríguezNo ratings yet
- Evidencia 3 Taller Construcción y Gestión de ProcesosDocument3 pagesEvidencia 3 Taller Construcción y Gestión de ProcesosJuan de Jesus Montenegro Susa100% (9)
- SIMULACIONES Realizadas en ProteusDocument9 pagesSIMULACIONES Realizadas en ProteusJair RuizNo ratings yet
- 4-DEP-DWF-MT-002 - 20201103 - Reporte - MT - Instrumentista PDFDocument7 pages4-DEP-DWF-MT-002 - 20201103 - Reporte - MT - Instrumentista PDFAlejandro Martinez MarintezNo ratings yet