You might also like
- L7 PolymorphismDocument43 pagesL7 PolymorphismKunal VermaNo ratings yet
- Advantages of Both Languages: Microsoft - VisualbasicDocument11 pagesAdvantages of Both Languages: Microsoft - VisualbasicGopalakrishnan SelvarajNo ratings yet
- Crash Course in C and assembly for operating systemsDocument10 pagesCrash Course in C and assembly for operating systems白菜No ratings yet
- Brief History of C++Document18 pagesBrief History of C++bshailee6127No ratings yet
- Programming Concepts in JavaDocument12 pagesProgramming Concepts in Javarishabhindoria57No ratings yet
- Java Lecture NotesDocument66 pagesJava Lecture NotesKumar Harsha100% (1)
- DifferenceDocument5 pagesDifferenceYdydNo ratings yet
- JavascriptDocument43 pagesJavascriptTaimur KhanNo ratings yet
- Advanced Classes: Relationships, Special Properties, and TemplatesDocument12 pagesAdvanced Classes: Relationships, Special Properties, and TemplatesSatish VarmaNo ratings yet
- Java Script Seminar: Prepared by Rohan Bairagi (180230111003)Document27 pagesJava Script Seminar: Prepared by Rohan Bairagi (180230111003)Rohan BairagiNo ratings yet
- Lect 12 (Functions in JavaScript)Document32 pagesLect 12 (Functions in JavaScript)ASIMNo ratings yet
- Threads and Process Synchronization TechniquesDocument22 pagesThreads and Process Synchronization TechniquesSadh SNo ratings yet
- How Is Java Different From Other Languages: - Less Than You ThinkDocument19 pagesHow Is Java Different From Other Languages: - Less Than You ThinkIamSajid JatoiNo ratings yet
- Microsoft - Visualbasic.Dll) - Many ofDocument13 pagesMicrosoft - Visualbasic.Dll) - Many ofGaurav SharmaNo ratings yet
- JavaScript Security PresentationDocument89 pagesJavaScript Security PresentationKiran Kumar KuppaNo ratings yet
- Anylogic and JavaDocument38 pagesAnylogic and JavaMohammad Ibna AnwarNo ratings yet
- 14 - FunctionsDocument33 pages14 - FunctionsnonameNo ratings yet
- Scopes and Data Types: CMSC 124Document34 pagesScopes and Data Types: CMSC 124Roel DagdagNo ratings yet
- Js Execution ContextDocument7 pagesJs Execution ContextKelve AragãoNo ratings yet
- Command Pattern Encapsulates Requests as ObjectsDocument8 pagesCommand Pattern Encapsulates Requests as Objectsali abbasNo ratings yet
- CH 3Classes&ObjectsDocument10 pagesCH 3Classes&ObjectsJayesh PantNo ratings yet
- Topics: Local Variable Vs Instance FieldsDocument13 pagesTopics: Local Variable Vs Instance FieldsShubhankar SinghNo ratings yet
- Selenium Open Source Test Automation Framework: September 2009Document18 pagesSelenium Open Source Test Automation Framework: September 2009raj_esh_0201No ratings yet
- JBWB Ejb3Document2 pagesJBWB Ejb3api-3750876No ratings yet
- Chapter 6 - FunctionDocument6 pagesChapter 6 - FunctionRosihan Ari YuanaNo ratings yet
- Hibernate IntroPPTDocument23 pagesHibernate IntroPPTapi-27318567No ratings yet
- Core JavaDocument54 pagesCore JavaAmrutha VarshaNo ratings yet
- JNI Overview for Embedding C in JavaDocument31 pagesJNI Overview for Embedding C in Javakumaravnish314482No ratings yet
- CH 7Document22 pagesCH 7nyinyilynn163No ratings yet
- C Interview Virtual Destructors InheritanceDocument6 pagesC Interview Virtual Destructors InheritancemahagaluaNo ratings yet
- CLAD MaterialDocument33 pagesCLAD MaterialUsman AsgharNo ratings yet
- CSC 553 Operating Systems: Lecture 4 - Concurrency: Mutual Exclusion and SynchronizationDocument32 pagesCSC 553 Operating Systems: Lecture 4 - Concurrency: Mutual Exclusion and Synchronizationhiba ilmainNo ratings yet
- Object-Oriented Programming (CS F213) : BITS PilaniDocument14 pagesObject-Oriented Programming (CS F213) : BITS PilaniSAURABH MITTALNo ratings yet
- Design (Components Are Designed)Document29 pagesDesign (Components Are Designed)rashidNo ratings yet
- 006 DeadlockDocument62 pages006 DeadlockAlivezeh PandaNo ratings yet
- HelpfulVIVAQUESTIONS ReviewedYKDocument8 pagesHelpfulVIVAQUESTIONS ReviewedYK2Tech2CuriousNo ratings yet
- Lab 2Document5 pagesLab 2Muneeb SamiNo ratings yet
- Computer Programming Languages: Lecture - 1Document38 pagesComputer Programming Languages: Lecture - 1Gul khanNo ratings yet
- SNUG10 Fork SlidesDocument33 pagesSNUG10 Fork SlideskrishnaavNo ratings yet
- Programming Language-JavascriptDocument35 pagesProgramming Language-JavascriptJeremieNo ratings yet
- Nhóm 10 Design Pattern 1Document37 pagesNhóm 10 Design Pattern 1Hào Đào TấnNo ratings yet
- C++ Concepts (Differences) A-ZDocument9 pagesC++ Concepts (Differences) A-ZhwjshNo ratings yet
- CS11 Advanced C++ Spring 2018 Lecture 1Document29 pagesCS11 Advanced C++ Spring 2018 Lecture 1Muhammad FarazNo ratings yet
- Functions in C - Parameters, Calling, Scopes and LifetimeDocument42 pagesFunctions in C - Parameters, Calling, Scopes and LifetimeRamani DharmeshNo ratings yet
- 05 Concurrency NewDocument68 pages05 Concurrency NewDhruvNo ratings yet
- Introduction To Object Oriented ConceptsDocument69 pagesIntroduction To Object Oriented ConceptsCuro HealNo ratings yet
- VB Vs C#Document13 pagesVB Vs C#surendhar_bNo ratings yet
- Advanced C++ ProgrammingDocument69 pagesAdvanced C++ ProgrammingVijay KumarNo ratings yet
- Modern Compiler Design Java TutorialDocument54 pagesModern Compiler Design Java TutorialRohan BagadiyaNo ratings yet
- PPL IV Unit-1Document18 pagesPPL IV Unit-1Gvzgjbc CcdbnmnNo ratings yet
- Labview Academy: 12. Óra - Event, Property NodeDocument54 pagesLabview Academy: 12. Óra - Event, Property Node劉燕明No ratings yet
- Functions: Structured Programming and Modular DesignDocument60 pagesFunctions: Structured Programming and Modular DesignYohannes DejeneNo ratings yet
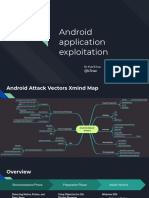
- B3nac - Android Application ExploitationDocument26 pagesB3nac - Android Application ExploitationjohnNo ratings yet
- Core Java Training-1Document45 pagesCore Java Training-1Nitin MahuleNo ratings yet
- CS 106X Classes and Objects: Guest Presenter: Marty Stepp (Stepp AT Cs DOT Stanford DOT Edu)Document32 pagesCS 106X Classes and Objects: Guest Presenter: Marty Stepp (Stepp AT Cs DOT Stanford DOT Edu)student 2No ratings yet
- 3 NamesDocument38 pages3 NamesAbraNo ratings yet
- Ood & P Unit - 1Document125 pagesOod & P Unit - 1Aravinda ReddyNo ratings yet
- Java Multithreading Interview Questions And AnswersFrom EverandJava Multithreading Interview Questions And AnswersNo ratings yet
- Java Coding Conventions ExplainedDocument17 pagesJava Coding Conventions Explainedp_kambeNo ratings yet
- Advanced Hibernate FeaturesDocument32 pagesAdvanced Hibernate Featuresnapoleonit76No ratings yet
- Image Restoration: © 2002 R. C. Gonzalez & R. E. WoodsDocument40 pagesImage Restoration: © 2002 R. C. Gonzalez & R. E. Woodsnapoleonit76No ratings yet
- Digital Image FundamentalsDocument28 pagesDigital Image Fundamentalsnapoleonit76No ratings yet
- C# - ThreadingDocument80 pagesC# - ThreadingEnes2009No ratings yet
- Uml For C#Document14 pagesUml For C#arnaldocostaNo ratings yet
- Elementary General Music ProgressionDocument9 pagesElementary General Music Progressionapi-398201233No ratings yet
- Data TypesDocument13 pagesData TypessuchitaNo ratings yet
- Music CraftDocument10 pagesMusic Craft孙博一100% (1)
- Unicode - ARABIC SCRIPT TUTORIALDocument16 pagesUnicode - ARABIC SCRIPT TUTORIALalqudsulana89100% (4)
- Rancangan Tahunan Matematik Tahun 6 - 2012Document6 pagesRancangan Tahunan Matematik Tahun 6 - 2012mrdanNo ratings yet
- C++ QuestionDocument14 pagesC++ Questionrosh555No ratings yet
- Lorenzo Sukhdeo September 27, 2013 CS 115-01 JessiDocument2 pagesLorenzo Sukhdeo September 27, 2013 CS 115-01 JessiYong JinNo ratings yet
- Chapter I - NotationDocument68 pagesChapter I - NotationJessieMangaboNo ratings yet
- Mql5 Language Reference: For The Metatrader 5 Client TerminalDocument5,741 pagesMql5 Language Reference: For The Metatrader 5 Client TerminalMarllon Cristian AlvesNo ratings yet
- Binary NumbersDocument15 pagesBinary Numberstoanvmpetrologx100% (3)
- ECCE 210-Lect-2-3-NumberSystemDocument101 pagesECCE 210-Lect-2-3-NumberSystemsultanNo ratings yet
- FSR181 Fantasia Tab Edition PDFDocument65 pagesFSR181 Fantasia Tab Edition PDFyairavidorNo ratings yet
- Quant AntiquaDocument1 pageQuant AntiquaDionisTheGreatNo ratings yet
- Chapter 2 Measurements and CalculationsDocument28 pagesChapter 2 Measurements and CalculationsPauline ZapantaNo ratings yet
- AsciicodesDocument7 pagesAsciicodesBehara GiriNo ratings yet
- Fraction-Formative AssessmentDocument1 pageFraction-Formative Assessmentapi-250808296No ratings yet
- OPERATOR OVERLOADING IN CDocument18 pagesOPERATOR OVERLOADING IN CdarshanNo ratings yet
- Factorial Program in C Using FunctionDocument4 pagesFactorial Program in C Using FunctionInd KanakNo ratings yet
- SystemVerilog Quick Reference GuideDocument3 pagesSystemVerilog Quick Reference Guidesabare100% (2)
- Choir Pre Test 1Document15 pagesChoir Pre Test 1api-236596610No ratings yet
- SWIFT MT940 Format Guide PDFDocument80 pagesSWIFT MT940 Format Guide PDFAli LoganNo ratings yet
- Place Value Chart (20 Places) PDFDocument1 pagePlace Value Chart (20 Places) PDFKim ReevesNo ratings yet
- B1.1 Module 5.2Document26 pagesB1.1 Module 5.2Sama7No ratings yet
- Classes in C++:-: Syntax For Class Declaration:-ExampleDocument2 pagesClasses in C++:-: Syntax For Class Declaration:-ExampleshAikNo ratings yet
- Diff Laguages ConpDocument16 pagesDiff Laguages ConpRaja MehranNo ratings yet
- C Primer PlusDocument3 pagesC Primer Plusriversoto10% (2)
- C++ NotesDocument116 pagesC++ Notessourabh patelNo ratings yet
- Round value to 2.0, enum output, combine statements, pointer program outputDocument4 pagesRound value to 2.0, enum output, combine statements, pointer program outputMohammad Ghouse Mohiddin KhanNo ratings yet
- Conversion TableDocument2 pagesConversion TableReah Mae NaoeNo ratings yet
- Daily Sight Reading Material for Classical GuitarDocument20 pagesDaily Sight Reading Material for Classical GuitarPR100% (1)