You might also like
- Lecture 02 Electrical Networks Transfer FunctionDocument18 pagesLecture 02 Electrical Networks Transfer FunctionShehroze TalatNo ratings yet
- Differential Equations Notes PDFDocument186 pagesDifferential Equations Notes PDFJoy ChatterjeeNo ratings yet
- Electric Network Transfer FunctionsDocument43 pagesElectric Network Transfer FunctionsJoshua Roberto Gruta100% (1)
- Solution Book For Engineering Mechanics by S TimoshenkoDocument4 pagesSolution Book For Engineering Mechanics by S TimoshenkoALIEN GYPZYNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Signals & Systems Workbook PDFDocument158 pagesSignals & Systems Workbook PDFJohnnyNo ratings yet
- Circuit Anlaysis S DomainDocument7 pagesCircuit Anlaysis S DomainKartik TyagiNo ratings yet
- 1285 Chapter 5 Respon FrekuensiDocument42 pages1285 Chapter 5 Respon FrekuensiEster NababanNo ratings yet
- Lecture Notes No. 2Document8 pagesLecture Notes No. 2Sean Ben KadusaleNo ratings yet
- Special Topics in Power - 1Document38 pagesSpecial Topics in Power - 1Ravichandran SekarNo ratings yet
- 02 - Mathematical ModellingDocument10 pages02 - Mathematical ModellingKenanSavaşMütefNo ratings yet
- Powersys 3Document39 pagesPowersys 3setsindia3735No ratings yet
- Powersys 4Document39 pagesPowersys 4setsindia3735No ratings yet
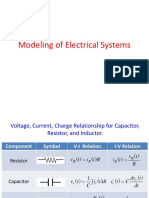
- Modeling of Electrical SystemsDocument51 pagesModeling of Electrical SystemsCheems PandeyNo ratings yet
- Formula SheetDocument5 pagesFormula SheetMahmut KILIÇNo ratings yet
- EE2023 Signals & Systems Revision Notes: 1 Circuit Elements and Their ModelsDocument15 pagesEE2023 Signals & Systems Revision Notes: 1 Circuit Elements and Their ModelsFarwaNo ratings yet
- A Few Practice Problems For The Third QuizDocument3 pagesA Few Practice Problems For The Third QuizQuỳnh Trang TrầnNo ratings yet
- Introduction To Electrical Engineering: Lecture 7 - 8Document31 pagesIntroduction To Electrical Engineering: Lecture 7 - 8satya prakashNo ratings yet
- Lecture 6: Laplace Domain Analysis: Lecturer: Dr. Vinita Vasudevan Scribe: RSS ChaithanyaDocument4 pagesLecture 6: Laplace Domain Analysis: Lecturer: Dr. Vinita Vasudevan Scribe: RSS ChaithanyaAniruddha RoyNo ratings yet
- Ch16 - Laplace Transforms IIDocument38 pagesCh16 - Laplace Transforms IIdadsdNo ratings yet
- 2-Lecture 02 Electrical Networks Transfer FunctionDocument18 pages2-Lecture 02 Electrical Networks Transfer FunctionHamza KhanNo ratings yet
- C3 1 5 10 Solution PDFDocument5 pagesC3 1 5 10 Solution PDFChanon TonmaiNo ratings yet
- Problem Set 6 SolutionsDocument5 pagesProblem Set 6 SolutionsKrupali ShahNo ratings yet
- Lecture 02 Electrical Networks Transfer FunctionDocument18 pagesLecture 02 Electrical Networks Transfer FunctionAhmad RazaNo ratings yet
- Linear System Theory: Dr. Vali UddinDocument49 pagesLinear System Theory: Dr. Vali UddinMuhammad HassanNo ratings yet
- 2.3.2 Analysis of The Conversion Ratio M (D, K) PDFDocument10 pages2.3.2 Analysis of The Conversion Ratio M (D, K) PDFArmy Joel MarianoNo ratings yet
- Tugas6ED - Cut Mouliza Meutia Vasya (1404105010004)Document2 pagesTugas6ED - Cut Mouliza Meutia Vasya (1404105010004)TensaranNo ratings yet
- Industrial Control: Assignment IIDocument12 pagesIndustrial Control: Assignment IIOMAR ALEJANDRO LONGORIA VAZQUEZNo ratings yet
- Networks Ppt2 SharedDocument22 pagesNetworks Ppt2 SharedAviral UpadhyayNo ratings yet
- Modeling and Simulation: Qiu-Zhou Runall - Tex - 12/25/2008 3:19am Page 13Document51 pagesModeling and Simulation: Qiu-Zhou Runall - Tex - 12/25/2008 3:19am Page 13Samuel ChanNo ratings yet
- ch5 150613063859 Lva1 App6891 PDFDocument64 pagesch5 150613063859 Lva1 App6891 PDFkhumisoNo ratings yet
- Principles of Steady-State Converter AnalysisDocument32 pagesPrinciples of Steady-State Converter AnalysisJaleel AhmedNo ratings yet
- Principles of Steady-State Converter AnalysisDocument32 pagesPrinciples of Steady-State Converter AnalysisAbdul Noman AbbasiNo ratings yet
- Principles of Steady-State Converter AnalysisDocument32 pagesPrinciples of Steady-State Converter AnalysisJaleel AhmedNo ratings yet
- Formula SheetDocument4 pagesFormula Sheetgeyoxi5098No ratings yet
- 2021 Eir 211 E01 MemoDocument22 pages2021 Eir 211 E01 MemoVaibhav ParshutamNo ratings yet
- Anexo 2 Transformadas de LaplacesDocument2 pagesAnexo 2 Transformadas de LaplacesValeria VillalobosNo ratings yet
- Control 4Document5 pagesControl 4Asfand HaroonNo ratings yet
- Assignment 11Document6 pagesAssignment 11Arvind SahuNo ratings yet
- Circuit Transfer Function Mohammad NazriDocument19 pagesCircuit Transfer Function Mohammad Nazrimohammad nazriNo ratings yet
- 4EE Spring 2019 Tutorial 1Document2 pages4EE Spring 2019 Tutorial 1ApoorvNo ratings yet
- Lecture 02 Electrical Networks Transfer FunctionDocument18 pagesLecture 02 Electrical Networks Transfer FunctionMuhammad Hassan JavedNo ratings yet
- Lecture 02 Electrical Networks Transfer FunctionDocument18 pagesLecture 02 Electrical Networks Transfer FunctionRammay SbNo ratings yet
- Laplace Transform Sample ProblemsDocument5 pagesLaplace Transform Sample ProblemsJoselito DaroyNo ratings yet
- Week 7Document24 pagesWeek 7Priyank PatelNo ratings yet
- Degree Electronic Engineeringe First Semester EXAMINATIONS 2020/2021Document3 pagesDegree Electronic Engineeringe First Semester EXAMINATIONS 2020/2021Peter JumreNo ratings yet
- RLC GenRLCSolnSummaryDocument3 pagesRLC GenRLCSolnSummaryrneem0593979123No ratings yet
- Lecture 02 Electrical Networks Transfer FunctionDocument18 pagesLecture 02 Electrical Networks Transfer FunctionAhmad RazaNo ratings yet
- STABILITY AND STATE SPACE DiagramsDocument19 pagesSTABILITY AND STATE SPACE DiagramsrameshsmeNo ratings yet
- PracClass 2 2019 3Document35 pagesPracClass 2 2019 3Maqsood ShaikNo ratings yet
- 7.4. State Space Averaging: Fundamentals of Power Electronics Chapter 7: AC Equivalent Circuit ModelingDocument50 pages7.4. State Space Averaging: Fundamentals of Power Electronics Chapter 7: AC Equivalent Circuit ModelingSomnath MaityNo ratings yet
- LT Formula SheetDocument1 pageLT Formula SheetnabeelbirdNo ratings yet
- 02 - Sample Problems With Solutions - HW2Document3 pages02 - Sample Problems With Solutions - HW2NurujjamanKhan0% (1)
- Laplace TransformDocument30 pagesLaplace Transformahmad rmammnehNo ratings yet
- Table LaplaceDocument1 pageTable LaplaceAndres MartínezNo ratings yet
- EE207 Problem Set 3 IIT ROPARDocument12 pagesEE207 Problem Set 3 IIT ROPARsumithasreekumar5No ratings yet
- ESC201 UDas Lec12 Step and Freq Response of RLC PDFDocument7 pagesESC201 UDas Lec12 Step and Freq Response of RLC PDFPk KumarNo ratings yet
- School of Electrical Engineering and Computer Science Department of Electrical EngineeringDocument34 pagesSchool of Electrical Engineering and Computer Science Department of Electrical EngineeringAbdur RafayNo ratings yet
- Laplace PDFDocument1 pageLaplace PDFTOM DAVISNo ratings yet
- Laplace Transforms: (N) N N 1 N 2 (N 1)Document2 pagesLaplace Transforms: (N) N N 1 N 2 (N 1)RahulNo ratings yet
- Bảng BD F.RDocument1 pageBảng BD F.Rpro2212No ratings yet
- F1B020097 - Muhammad Rasyad Trialgi - Tubes Sistem Kendali (C)Document4 pagesF1B020097 - Muhammad Rasyad Trialgi - Tubes Sistem Kendali (C)Rasyad TrialgiNo ratings yet
- Analysis of Common-Collector Colpitts OscillatorDocument8 pagesAnalysis of Common-Collector Colpitts OscillatorFreeFM100% (5)
- Cmoy Tangent SCHDocument1 pageCmoy Tangent SCHmanpreetsingh3458417No ratings yet
- SPIM Command LineDocument3 pagesSPIM Command LinesantaimenNo ratings yet
- Harga Ban MotorDocument10 pagesHarga Ban Motorapi-380018292% (12)
- The Z Transform: Chapter 11Document33 pagesThe Z Transform: Chapter 11santaimenNo ratings yet
- Matlab Tutorial For Systems and Control TheoryDocument18 pagesMatlab Tutorial For Systems and Control TheoryelfrichNo ratings yet
- Model Question Pape 1 M3 - 21-22Document5 pagesModel Question Pape 1 M3 - 21-22Nk KumarNo ratings yet
- Curriculum S T R U C T U R E of S.Y.-B.Tech (Electrical Engineering) (Regularstudents)Document56 pagesCurriculum S T R U C T U R E of S.Y.-B.Tech (Electrical Engineering) (Regularstudents)Bhushan RaneNo ratings yet
- Expt 3 Transfer FunctionDocument4 pagesExpt 3 Transfer FunctionAngelo Legarda De CastroNo ratings yet
- Systems and Signals Laplace Transform PracticeDocument4 pagesSystems and Signals Laplace Transform PracticeDr. DriftNo ratings yet
- 1 MATE2A2 Solving DEs With Laplace TransformsDocument10 pages1 MATE2A2 Solving DEs With Laplace TransformsMahlatse Morongwa MalakaNo ratings yet
- USN 17MAT21: Model Question Paper With Effect From 2017-18Document3 pagesUSN 17MAT21: Model Question Paper With Effect From 2017-18Madan GopalNo ratings yet
- ClassPad TutorialDocument27 pagesClassPad TutorialΙωάννης Γεωργίου ΜάντηςNo ratings yet
- III and IV Sem Autonomous Scheme and SyllabusDocument61 pagesIII and IV Sem Autonomous Scheme and SyllabusElaine PailyNo ratings yet
- Feedback and Control SystemDocument7 pagesFeedback and Control SystemMax Sedric L LaylayNo ratings yet
- 01AUL SG 17d SymbolicCircuitAnalysisDocument33 pages01AUL SG 17d SymbolicCircuitAnalysisLuca CorNo ratings yet
- HJKKJKDocument79 pagesHJKKJKDeepak ChandranNo ratings yet
- Applied Mathematics - BCA I SemDocument15 pagesApplied Mathematics - BCA I SemAssistant Director100% (1)
- Tutorial 11 - Z-Transform (Exercises)Document2 pagesTutorial 11 - Z-Transform (Exercises)Taylor Andres Amaya100% (1)
- Syllabus 3rd SemDocument6 pagesSyllabus 3rd Sem083Rahul SinghNo ratings yet
- Mathematics - 2Document168 pagesMathematics - 2Infi Coaching CenterNo ratings yet
- B. Tech Chemical CoursesofstudyDocument25 pagesB. Tech Chemical Coursesofstudyvineetkumar24No ratings yet
- Z TransformDocument28 pagesZ TransformgptkoushikNo ratings yet
- Computer Engineering: Guru Nanak Dev Institute of TechnologyDocument19 pagesComputer Engineering: Guru Nanak Dev Institute of TechnologyKumud KumNo ratings yet
- Edwin L. Woollett - Maxima by ExampleDocument514 pagesEdwin L. Woollett - Maxima by ExampleNéstor Valles VillarrealNo ratings yet
- Control System MidtermDocument19 pagesControl System MidtermSumangil, Maria Margarita P.No ratings yet
- RGPV SyllabusDocument9 pagesRGPV SyllabusNavneet PandharipandeNo ratings yet
- Ece PDFDocument177 pagesEce PDFAbhNo ratings yet
- B. Tech. Automotive Curriculum & SyllabusDocument92 pagesB. Tech. Automotive Curriculum & SyllabusAkash SoniNo ratings yet
- Series Solutions and FrobeniusDocument49 pagesSeries Solutions and FrobeniusMilito GilbertoNo ratings yet
- (English) LCS 4a - Translational Mechanical Systems - Mathematical Modeling (DownSub - Com)Document6 pages(English) LCS 4a - Translational Mechanical Systems - Mathematical Modeling (DownSub - Com)Muh. ILHAM. Hasby. HNo ratings yet
- Linear Circuit Analysis Decarlo PDF - Google SearchDocument2 pagesLinear Circuit Analysis Decarlo PDF - Google SearchHimanshu Kumar Sagar0% (3)
- Mat1011 Calculus-For-Engineers Eth 1.0 37 Mat1011Document3 pagesMat1011 Calculus-For-Engineers Eth 1.0 37 Mat1011Sahil KalingNo ratings yet