You might also like
- UECM2043, UECM2093 Operations Research Tutorial 2 LP ProblemsDocument4 pagesUECM2043, UECM2093 Operations Research Tutorial 2 LP Problemskamun0100% (2)
- Dynamic ProgrammingDocument101 pagesDynamic ProgrammingrenumathavNo ratings yet
- Dynamic ProgrammingDocument26 pagesDynamic Programmingshraddha pattnaikNo ratings yet
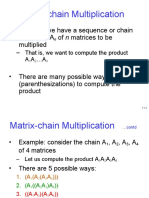
- Matrix-Chain Multiplication: - Suppose We Have A Sequence or Chain A, A,, A of N Matrices To Be MultipliedDocument15 pagesMatrix-Chain Multiplication: - Suppose We Have A Sequence or Chain A, A,, A of N Matrices To Be Multipliedrosev15No ratings yet
- The Fundamentals: Algorithms The IntegersDocument55 pagesThe Fundamentals: Algorithms The Integersnguyên trần minhNo ratings yet
- DAADocument62 pagesDAAanon_385854451No ratings yet
- Design & Analysis of Algorithms (DAA) Unit - IIIDocument17 pagesDesign & Analysis of Algorithms (DAA) Unit - IIIYogi NambulaNo ratings yet
- Matrix Chain OrderingDocument15 pagesMatrix Chain OrderingZeseya SharminNo ratings yet
- Lecture 24 (Matrix Chain Multiplication)Document17 pagesLecture 24 (Matrix Chain Multiplication)Almaz RizviNo ratings yet
- Dynamic Programming Unit Explains Matrix Chain Order ProblemDocument16 pagesDynamic Programming Unit Explains Matrix Chain Order ProblemtharunkuttiNo ratings yet
- Dynamic ProgrammingDocument52 pagesDynamic ProgrammingattaullahchNo ratings yet
- Matrix Chain Multiplication and Travelling Salesman Problem Using Dynamic ProgrammingDocument35 pagesMatrix Chain Multiplication and Travelling Salesman Problem Using Dynamic ProgrammingkvbommidiNo ratings yet
- Dynamic Prog Updated (1)Document66 pagesDynamic Prog Updated (1)basamsettisahithiNo ratings yet
- Welcome To Our Presentation: Topics:Dynamic ProgrammingDocument25 pagesWelcome To Our Presentation: Topics:Dynamic ProgrammingSushanta AcharjeeNo ratings yet
- Data Structures and Algorithms Unit - V: Dynamic ProgrammingDocument19 pagesData Structures and Algorithms Unit - V: Dynamic ProgrammingTaniaa AlamNo ratings yet
- U 2Document20 pagesU 2ganeshrjNo ratings yet
- Dynamic Programming Exercises: L2 VersionDocument15 pagesDynamic Programming Exercises: L2 VersionRichard Y. AlcantaraNo ratings yet
- Algo 09Document39 pagesAlgo 09arunenggeceNo ratings yet
- Ada 4Document3 pagesAda 4vipul jhaNo ratings yet
- 03-The fundamentals- Algorithms- IntegersDocument54 pages03-The fundamentals- Algorithms- Integerstungnt26999No ratings yet
- הרצאה 9Document64 pagesהרצאה 9דוד סיידוןNo ratings yet
- Dynamic ProgrammingDocument7 pagesDynamic ProgrammingGlenn GibbsNo ratings yet
- Find Longest Increasing Subsequence Dynamic Programming AlgorithmDocument8 pagesFind Longest Increasing Subsequence Dynamic Programming Algorithmsiddharth1kNo ratings yet
- Multiplym 2Document23 pagesMultiplym 2adyant.gupta2022No ratings yet
- Dynamic Programming: 1 Matrix-Chain MultiplicationDocument5 pagesDynamic Programming: 1 Matrix-Chain MultiplicationPrabir K DasNo ratings yet
- Dynamic ProgrammingDocument47 pagesDynamic Programmingrahulj_171No ratings yet
- Dynamic ProgrammingDocument110 pagesDynamic ProgrammingJatin BindalNo ratings yet
- Dynamic ProgrammingDocument35 pagesDynamic ProgrammingMuhammad JunaidNo ratings yet
- Data Structures and Algorithms Unit - V: Dynamic ProgrammingDocument19 pagesData Structures and Algorithms Unit - V: Dynamic ProgrammingVaruni DeviNo ratings yet
- DynamicDocument18 pagesDynamicBhavini Rajendrakumar BhattNo ratings yet
- DynprogDocument30 pagesDynprogankit47No ratings yet
- HW 5 SolnDocument12 pagesHW 5 SolnExulansisNo ratings yet
- Document 1Document3 pagesDocument 1mi5a.saad12345No ratings yet
- HW 9 SolutionDocument8 pagesHW 9 SolutionResearchNo ratings yet
- Ada Module 3 NotesDocument40 pagesAda Module 3 NotesLokko PrinceNo ratings yet
- Unit 4Document28 pagesUnit 4Dr. Nageswara Rao EluriNo ratings yet
- CHAP5 DP and GreedyDocument75 pagesCHAP5 DP and GreedyDo DragonNo ratings yet
- Daa Unit VnotesDocument6 pagesDaa Unit VnotesAdi SinghNo ratings yet
- CS203 Week6Document7 pagesCS203 Week6Rajan KumarNo ratings yet
- Ald Assignment 5 AMAN AGGARWAL (2018327) : Divide and ConquerDocument12 pagesAld Assignment 5 AMAN AGGARWAL (2018327) : Divide and ConquerRitvik GuptaNo ratings yet
- Unit3 NotesDocument29 pagesUnit3 NotesprassadyashwinNo ratings yet
- SadcxDocument19 pagesSadcxVenkat BalajiNo ratings yet
- DAA U-4 Dynamic ProgrammingDocument23 pagesDAA U-4 Dynamic Programmings.s.r.k.m. guptaNo ratings yet
- Lecture 6 1Document97 pagesLecture 6 1Vivekanandhan VijayanNo ratings yet
- Daa Unit-3Document32 pagesDaa Unit-3pihadar269No ratings yet
- MATHEMATICSDocument862 pagesMATHEMATICSLeandro Baldicañas Piczon100% (1)
- Fundamentals of Algorithms 10B11CI411: Dynamic Programming Instructor: Raju PalDocument70 pagesFundamentals of Algorithms 10B11CI411: Dynamic Programming Instructor: Raju PalSurinder PalNo ratings yet
- Brute Force: Design and Analysis of Algorithms - Chapter 3 1Document18 pagesBrute Force: Design and Analysis of Algorithms - Chapter 3 1theresa.painterNo ratings yet
- MB0048 or Solved Winter Drive Assignment 2012Document9 pagesMB0048 or Solved Winter Drive Assignment 2012Pawan KumarNo ratings yet
- Dynamic ProgDocument48 pagesDynamic Prog2023itm005.saunakNo ratings yet
- Dynamic Programming - Formalized by Richard Bellman - "Programming" Relates To Use of Tables, Rather Than Computer ProgrammingDocument23 pagesDynamic Programming - Formalized by Richard Bellman - "Programming" Relates To Use of Tables, Rather Than Computer ProgrammingHana HoubaNo ratings yet
- Daa 4 Unit DetailsDocument14 pagesDaa 4 Unit DetailsSathyendra Kumar VNo ratings yet
- HW 1Document6 pagesHW 1Morokot AngelaNo ratings yet
- Dynamic Programming1Document38 pagesDynamic Programming1Mohammad Bilal MirzaNo ratings yet
- 7-5 Solution PDFDocument3 pages7-5 Solution PDFDaniel Bastos MoraesNo ratings yet
- SE-Comps SEM4 AOA-CBCGS DEC18 SOLUTIONDocument15 pagesSE-Comps SEM4 AOA-CBCGS DEC18 SOLUTIONSagar SaklaniNo ratings yet
- CS-2012 (Daa) - CS End Nov 2023Document21 pagesCS-2012 (Daa) - CS End Nov 2023bojat18440No ratings yet
- Design and Analysis of Algorithm: Greedy Method and Spanning TreesDocument31 pagesDesign and Analysis of Algorithm: Greedy Method and Spanning TreesSai Chaitanya BalliNo ratings yet
- Module 3Document19 pagesModule 3cbgopinathNo ratings yet
- List of Cad/Cam Subject Text Books: S.No Title of BookDocument6 pagesList of Cad/Cam Subject Text Books: S.No Title of BookSubbu SuniNo ratings yet
- Operation Research Question BankDocument4 pagesOperation Research Question Bankhosurushanker100% (1)
- (AK) BFTech Sem V POM - D.Sureshkumar, NIFT, KannurDocument6 pages(AK) BFTech Sem V POM - D.Sureshkumar, NIFT, KannurDebashruti BiswasNo ratings yet
- Topic 2 Part 4 Priority RR EtcDocument16 pagesTopic 2 Part 4 Priority RR EtcAmirul AdamNo ratings yet
- Principles of Management NotesDocument178 pagesPrinciples of Management NotesChelladurai Krishnasamy100% (1)
- Group 4 Presentation OM ERP and MRP IIDocument22 pagesGroup 4 Presentation OM ERP and MRP IICindi NabilaNo ratings yet
- CS570 Analysis of Algorithms Exam II SolutionsDocument14 pagesCS570 Analysis of Algorithms Exam II SolutionsDan GoodmanNo ratings yet
- Intro to Operations ResearchDocument8 pagesIntro to Operations Researchermias alemeNo ratings yet
- Chapter 1: Information Systems in Business Today 1.1 The Role On Information Systems in Business TodayDocument7 pagesChapter 1: Information Systems in Business Today 1.1 The Role On Information Systems in Business TodayRyanNo ratings yet
- ITGN256 Assignment Question Fall 2020-21Document7 pagesITGN256 Assignment Question Fall 2020-21Muhammad hamzaNo ratings yet
- Quesbank 270216063430Document4 pagesQuesbank 270216063430Man C Is a SuksNo ratings yet
- Effect of "Operations Research" in Science and Industry: I J C R BDocument7 pagesEffect of "Operations Research" in Science and Industry: I J C R BLydia Rejas Villanueva TomadaNo ratings yet
- ALODocument376 pagesALOAchal ChoxNo ratings yet
- VMKVEC Optimization Techniques NotesDocument14 pagesVMKVEC Optimization Techniques Notessmg26thmay100% (1)
- Notes On Minimum Cost Network Flow ModelsDocument8 pagesNotes On Minimum Cost Network Flow Modelssusheelshastry542No ratings yet
- Tutorial: Operations Research in Constraint Programming: John Hooker Carnegie Mellon UniversityDocument329 pagesTutorial: Operations Research in Constraint Programming: John Hooker Carnegie Mellon UniversityBhagirat DasNo ratings yet
- Updated - Chap07 Goal Programming and Multiple Objective OptimizationDocument39 pagesUpdated - Chap07 Goal Programming and Multiple Objective OptimizationbauemmvssNo ratings yet
- PSO - Kota Baru Parahyangan 2017Document52 pagesPSO - Kota Baru Parahyangan 2017IwanNo ratings yet
- Unit IIDocument29 pagesUnit IIsmg26thmayNo ratings yet
- Jurmatis: Analisis Pengendalian Ketersediaan Bahan Baku Di PT. Akasha Wira Internasional, TBK Menggunakan Metode EOQDocument10 pagesJurmatis: Analisis Pengendalian Ketersediaan Bahan Baku Di PT. Akasha Wira Internasional, TBK Menggunakan Metode EOQLaras NisrinaNo ratings yet
- CPS 356 Lecture Notes: CPU Scheduling AlgorithmsDocument10 pagesCPS 356 Lecture Notes: CPU Scheduling Algorithmssad cclNo ratings yet
- Application of Graph Theory in Operations ResearchDocument3 pagesApplication of Graph Theory in Operations ResearchInternational Journal of Innovative Science and Research Technology100% (2)
- Cse Vi Operations Research (10cs661) NotesDocument98 pagesCse Vi Operations Research (10cs661) NotesRajesh KannaNo ratings yet
- Application of StatisticsDocument5 pagesApplication of Statisticsmaksonaug70% (1)
- Ford-Fulkerson AlgorithmDocument6 pagesFord-Fulkerson Algorithmテラン みさおNo ratings yet
- Or Lectures 2011 - Part 2Document191 pagesOr Lectures 2011 - Part 2Ahmed RamadanNo ratings yet
- Linear Programming Model Maximizes Production ProfitDocument76 pagesLinear Programming Model Maximizes Production Profit123123azxc100% (1)
- JCL Mainframebrasil PDFDocument165 pagesJCL Mainframebrasil PDFRicardo Azeredo FeitosaNo ratings yet
- Three Dimensional Maritime Transportation ModelsDocument3 pagesThree Dimensional Maritime Transportation ModelsDan Nikos100% (1)