You might also like
- Sensors and TransducersDocument24 pagesSensors and TransducersArdian Wardhana100% (1)
- PPT MFG Chapter40 FinalDocument46 pagesPPT MFG Chapter40 FinalSeçkin DilekNo ratings yet
- File:Circuit Diagram - Pictorial and Schematic - PNGDocument4 pagesFile:Circuit Diagram - Pictorial and Schematic - PNGBhel_Mortel_6465No ratings yet
- Mechanical Behavior, Testing and Manufacturing Properties of MaterialsDocument34 pagesMechanical Behavior, Testing and Manufacturing Properties of MaterialsLujain AlrashdanNo ratings yet
- Introduction To MicrocontrollersDocument65 pagesIntroduction To MicrocontrollersKeertanaNo ratings yet
- Introduction to Microcontrollers and Embedded SystemsDocument22 pagesIntroduction to Microcontrollers and Embedded SystemsstrafforNo ratings yet
- Unit1 - Introducation To MechatronicsDocument92 pagesUnit1 - Introducation To Mechatronicsguddu100% (3)
- Microcontroller Basics ChapterDocument150 pagesMicrocontroller Basics ChapterEngr Shehzad HaneefNo ratings yet
- Introduction Manufacturing ProcessesDocument46 pagesIntroduction Manufacturing Processespurukumar322No ratings yet
- Fpga Vs Asic Design FlowDocument32 pagesFpga Vs Asic Design FlowkrishnaavNo ratings yet
- EC334 Microcontrollers Lab-Manual FinalDocument52 pagesEC334 Microcontrollers Lab-Manual FinalSanjid ElahiNo ratings yet
- Integrated Control System: Prepared By: Guided By: Rajyaguru Maulik M. D.M. Patel (General Manage, Inst)Document31 pagesIntegrated Control System: Prepared By: Guided By: Rajyaguru Maulik M. D.M. Patel (General Manage, Inst)Sunil PillaiNo ratings yet
- Chapter 1 - Fundamental of MicrocontrollerDocument30 pagesChapter 1 - Fundamental of MicrocontrollerminhkhoaNo ratings yet
- Introduction To Water Pollution PDH Source LLCDocument46 pagesIntroduction To Water Pollution PDH Source LLCAmit Kumar MondolNo ratings yet
- Embedded New 1 PDFDocument24 pagesEmbedded New 1 PDFRohit ChaurasiaNo ratings yet
- Destructive and Non-Destructive TestingDocument17 pagesDestructive and Non-Destructive TestingBhargav ChaitanyaNo ratings yet
- Water PollutionDocument3 pagesWater PollutionprosenNo ratings yet
- Microcontrollers Lab ManualDocument53 pagesMicrocontrollers Lab Manualksrajuhyd100% (1)
- 50 Top Digital Electronics Questions and Answers PDF: ER-Exams AppDocument6 pages50 Top Digital Electronics Questions and Answers PDF: ER-Exams AppijazNo ratings yet
- MP Manual 2Document73 pagesMP Manual 2Subir ShresthaNo ratings yet
- Hardware Features: Contents at A GlanceDocument56 pagesHardware Features: Contents at A Glancesimidreanuc8708No ratings yet
- Exploring Character Coding SchemesDocument23 pagesExploring Character Coding SchemesIbrahim AbdulaliNo ratings yet
- Chip Synthesis Workshop 1392Document493 pagesChip Synthesis Workshop 1392RohitKandula100% (2)
- Robot Sensors and TransducersDocument176 pagesRobot Sensors and TransducerssakthivelNo ratings yet
- Programable Logic ControllerDocument48 pagesProgramable Logic ControllerNikeshraut100% (1)
- DCOM 150-Lab 1 - Hexa-Decimal Numbering System and File Signature - Fall 2016Document6 pagesDCOM 150-Lab 1 - Hexa-Decimal Numbering System and File Signature - Fall 2016Babs Buneez0% (1)
- In The Name of Allah The Most Benificet and The Most MercifulDocument24 pagesIn The Name of Allah The Most Benificet and The Most MercifulAsad RazaNo ratings yet
- Introduction To CADDocument27 pagesIntroduction To CADAravind AakashNo ratings yet
- Microcontrollers Lab ManualDocument37 pagesMicrocontrollers Lab ManualArati DazNo ratings yet
- ADD N NUMBERSDocument41 pagesADD N NUMBERSPrince RajNo ratings yet
- Water AnalysisDocument7 pagesWater AnalysisSolehah OmarNo ratings yet
- Convert Numbers Between Bases & Represent in Computer FormatsDocument2 pagesConvert Numbers Between Bases & Represent in Computer FormatsJamen SinghNo ratings yet
- Midterm Exam IDocument4 pagesMidterm Exam IAbdullatif AlOmairNo ratings yet
- I. Water and Its Treatment-MCQs-1Document6 pagesI. Water and Its Treatment-MCQs-1fuckjungaliNo ratings yet
- Lab Report Electrostatic PrecipitatorDocument9 pagesLab Report Electrostatic Precipitatoraina shaminaNo ratings yet
- Water Pollution: Effects of Pollution On Water and Fish Production Using Macro Invertebrates As Bio-IndicatorsDocument54 pagesWater Pollution: Effects of Pollution On Water and Fish Production Using Macro Invertebrates As Bio-IndicatorsDaniel ObasiNo ratings yet
- Water Pollution: Everything You Need To KnowDocument7 pagesWater Pollution: Everything You Need To KnowManu Jacob Steaphen 19MST0050No ratings yet
- AQ010-3-1-Mathematical Concepts For Computing PDFDocument4 pagesAQ010-3-1-Mathematical Concepts For Computing PDFAbdulla Razeef0% (1)
- CH06 Memory OrganizationDocument85 pagesCH06 Memory OrganizationBiruk KassahunNo ratings yet
- English For Teachers 11 PDED 0021/DED 0321: Oral Presentation SkillsDocument30 pagesEnglish For Teachers 11 PDED 0021/DED 0321: Oral Presentation SkillsMzee MsideeNo ratings yet
- 01 15mec 314 Metrology Unit 3 Signal+conditioning PDFDocument73 pages01 15mec 314 Metrology Unit 3 Signal+conditioning PDFNithinArvindNo ratings yet
- The Basics of Lasers and Laser Welding & CuttingDocument38 pagesThe Basics of Lasers and Laser Welding & CuttingElisa MafteiNo ratings yet
- Questions Heat TreatmentDocument9 pagesQuestions Heat TreatmentAmirul Fahmie50% (2)
- SyllabusDocument5 pagesSyllabusChandan Prasai100% (1)
- Signal Conditioning and Filter Design GuideDocument41 pagesSignal Conditioning and Filter Design GuideSaleem Haddad100% (1)
- Preliminary Treatment QuestionsDocument3 pagesPreliminary Treatment Questionsrmrv valdezNo ratings yet
- Lecture 3 Example of Mechatronic SystemDocument36 pagesLecture 3 Example of Mechatronic SystemIljuha9No ratings yet
- Ece213 MCQDocument34 pagesEce213 MCQJahnavi JanuNo ratings yet
- Unit-1-Basics of MetrologyDocument42 pagesUnit-1-Basics of Metrologytamilselvan nNo ratings yet
- Programmable Logic Controllers: Evolution, Architecture, ProgrammingDocument58 pagesProgrammable Logic Controllers: Evolution, Architecture, ProgrammingVignesh Meyyappan100% (1)
- Dire Dawa University Institute of TechnologyDocument28 pagesDire Dawa University Institute of TechnologyAsed ZakirNo ratings yet
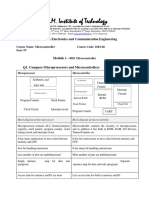
- B.N.M. Institute of Technology Microcontroller CourseDocument19 pagesB.N.M. Institute of Technology Microcontroller Coursekirthi bharadwajNo ratings yet
- PLC/SCADA Presentation Automation Process ControlDocument39 pagesPLC/SCADA Presentation Automation Process ControlsaarjatNo ratings yet
- Programming 8-Bit Pic Microcontrollers Inc: Martin Bates Elsevier 2008Document30 pagesProgramming 8-Bit Pic Microcontrollers Inc: Martin Bates Elsevier 2008SonyKurupNo ratings yet
- EE6008 MBSDDocument34 pagesEE6008 MBSDHans John D'cruzNo ratings yet
- Microprocessor & Itsmicroprocessor & Its Applications - PPTX ApplicationsDocument40 pagesMicroprocessor & Itsmicroprocessor & Its Applications - PPTX ApplicationsAchiaa Osei-DonkorNo ratings yet
- Mechatronics Experiment Ladder Diagram SimulationDocument14 pagesMechatronics Experiment Ladder Diagram SimulationAakash VirdheNo ratings yet
- Micro Controller Based Digital Visitor CounterDocument36 pagesMicro Controller Based Digital Visitor CounterThasnim KhanNo ratings yet
- State Board of Technical Education and Training, Tamil Nadu Syllabus For Diploma in Electrical and Electronics Engineering L-SchemeDocument6 pagesState Board of Technical Education and Training, Tamil Nadu Syllabus For Diploma in Electrical and Electronics Engineering L-SchemeRoshindas Pudhiya PurayilNo ratings yet
- Micro ControllerDocument41 pagesMicro ControllerSaravana RajaNo ratings yet
- Microprocessor Fundamentals Lecture 5: Components and ArchitectureDocument18 pagesMicroprocessor Fundamentals Lecture 5: Components and ArchitectureHuzaifa AliNo ratings yet
- 25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentDocument84 pages25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentdileeppatraNo ratings yet
- 15 - A SurveyDocument6 pages15 - A SurveySanjayaRangaLSenavirathnaNo ratings yet
- Eng Management - Course WorkDocument4 pagesEng Management - Course WorkSanjayaRangaLSenavirathnaNo ratings yet
- HH5P 18Document14 pagesHH5P 18SanjayaRangaLSenavirathnaNo ratings yet
- Parliament of The Democratic Socialist Republic of Sri LankaDocument25 pagesParliament of The Democratic Socialist Republic of Sri LankaSanjayaRangaLSenavirathnaNo ratings yet
- L S W S N: Ocalization Ystems For Ireless Ensor EtworksDocument7 pagesL S W S N: Ocalization Ystems For Ireless Ensor EtworksSanjayaRangaLSenavirathnaNo ratings yet
- Tuition FeesDocument2 pagesTuition FeesKővári DávidNo ratings yet
- Example Gcse Questions EditableDocument1 pageExample Gcse Questions EditableSanjayaRangaLSenavirathnaNo ratings yet
- Methods For Node Localization in Wireless Sensor NetworksDocument2 pagesMethods For Node Localization in Wireless Sensor NetworksSanjayaRangaLSenavirathnaNo ratings yet
- Reports Feasibility Research TechnicalDocument6 pagesReports Feasibility Research TechnicalDanish Ahmed AlviNo ratings yet
- 07566490Document6 pages07566490SanjayaRangaLSenavirathnaNo ratings yet
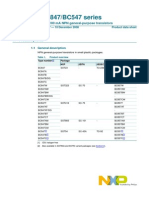
- 1gw - Bc547, Bc847 Series NXPDocument15 pages1gw - Bc547, Bc847 Series NXPKlebber MarchettoNo ratings yet
- Curricula Electronic TelecomDocument2 pagesCurricula Electronic TelecomSanjayaRangaLSenavirathnaNo ratings yet
- Vacancies: University of Sri Jayewardenepura Faculty of EngineeringDocument1 pageVacancies: University of Sri Jayewardenepura Faculty of EngineeringSanjayaRangaLSenavirathnaNo ratings yet
- And9056 DDocument4 pagesAnd9056 DSanjayaRangaLSenavirathnaNo ratings yet
- 4 N 25Document7 pages4 N 25Dian SetiawanNo ratings yet
- IEEE Acroynm ListDocument12 pagesIEEE Acroynm ListidomaNo ratings yet
- 4 N 35Document7 pages4 N 35Heriberto Flores AmpieNo ratings yet
- RV 4 5 Led Driver With Dimmer For Fluorescent LampDocument1 pageRV 4 5 Led Driver With Dimmer For Fluorescent LampSanjayaRangaLSenavirathnaNo ratings yet
- Accreditation of Northshore Engineering ProgrammesDocument20 pagesAccreditation of Northshore Engineering ProgrammesSanjayaRangaLSenavirathnaNo ratings yet
- 4 N 25Document7 pages4 N 25Dian SetiawanNo ratings yet
- 1 N 4148 WDocument6 pages1 N 4148 WSanjayaRangaLSenavirathnaNo ratings yet
- CD 4020Document8 pagesCD 4020Samuel Ngure TharauNo ratings yet
- AVR Atmega128 Datasheet SummaryDocument24 pagesAVR Atmega128 Datasheet Summaryazrael1231No ratings yet
- Degree Classification Calculator2012Document6 pagesDegree Classification Calculator2012Fazian MurtazaNo ratings yet
- VHDL 1.Document5 pagesVHDL 1.SanjayaRangaLSenavirathnaNo ratings yet
- Film Cap1Document66 pagesFilm Cap1SanjayaRangaLSenavirathnaNo ratings yet
- VHDL ALU TutorialDocument4 pagesVHDL ALU TutorialArpit AggarwalNo ratings yet
- Induction CookerDocument2 pagesInduction CookerSanjayaRangaLSenavirathnaNo ratings yet
- Basic ElectronicsDocument16 pagesBasic ElectronicsddyzleeNo ratings yet
- Introduction to Verilog HDLDocument69 pagesIntroduction to Verilog HDLAustin Tyson DsouzaNo ratings yet
- Computer Architecture Lab 2Document6 pagesComputer Architecture Lab 2Hasan IqbalNo ratings yet
- Alarm Clock Using VerilogDocument5 pagesAlarm Clock Using VerilogRadhikaNo ratings yet
- Esoteric LanguagesDocument2 pagesEsoteric Languagesgilbert biloNo ratings yet
- M2 Session4Document17 pagesM2 Session4Amarnath KambaleNo ratings yet
- Integrated Circuits and Applications: CO1 CO2 CO3 CO4 CO5Document72 pagesIntegrated Circuits and Applications: CO1 CO2 CO3 CO4 CO5Chinsdazz KumarNo ratings yet
- VLSI design using Verilog HDLDocument21 pagesVLSI design using Verilog HDLDinesh PalavalasaNo ratings yet
- Lecture 3 P4 NetFPGADocument83 pagesLecture 3 P4 NetFPGAnguyentienduy1512No ratings yet
- Karthiga Phase I ReportDocument69 pagesKarthiga Phase I ReportKarthiga MuruganNo ratings yet
- Bece102l - Digital-Systems-Design - TH - 1.0 - 71 - Bece102l - 66 AcpDocument2 pagesBece102l - Digital-Systems-Design - TH - 1.0 - 71 - Bece102l - 66 AcpsggrfgfNo ratings yet
- MEL G623 Advanced VLSI Design Course Handout: SECOND SEMESTER 2021-2022Document7 pagesMEL G623 Advanced VLSI Design Course Handout: SECOND SEMESTER 2021-2022SARITA GAJANAN BIJAWENo ratings yet
- Implement Logic Gates using Tanner and XilinxDocument25 pagesImplement Logic Gates using Tanner and Xilinxjagadeesh100% (1)
- Verilog TutorialDocument19 pagesVerilog Tutorialr4royalcNo ratings yet
- VHDLBased Circuits Designand Synthesison FPGADocument6 pagesVHDLBased Circuits Designand Synthesison FPGAPhuc Van NguyenNo ratings yet
- Atmel Fpga FlowDocument21 pagesAtmel Fpga FlowOmprakash Ramanathan RamamoorthyNo ratings yet
- Verilog Quickstart A Practical Guide ToDocument2 pagesVerilog Quickstart A Practical Guide ToTharun kondaNo ratings yet
- Vlsi ResumeDocument4 pagesVlsi Resumelinhanuma60% (5)
- © Sudhakar Yalamanchili, Georgia Institute of Technology, 2006Document13 pages© Sudhakar Yalamanchili, Georgia Institute of Technology, 2006Maha IswaryaNo ratings yet
- Ug1118 Vivado Creating Packaging Custom IpDocument105 pagesUg1118 Vivado Creating Packaging Custom IpvpsampathNo ratings yet
- LPM ShiftregDocument46 pagesLPM ShiftregVamshi KrishnaNo ratings yet
- PHD Thesis On Vlsi DesignDocument5 pagesPHD Thesis On Vlsi DesignBuyEssaysTulsa100% (2)
- CV Sellaroli AlessioDocument2 pagesCV Sellaroli AlessioSellaroliAlessioNo ratings yet
- Vlsi 2018 19 PDFDocument44 pagesVlsi 2018 19 PDFUmang yadavNo ratings yet
- Digital System Design: Tutorial-1: Getting StartedDocument17 pagesDigital System Design: Tutorial-1: Getting StartedVivek S MayinkarNo ratings yet
- ASIC-System On Chip-VLSI Design - SRAM Cell Design PDFDocument8 pagesASIC-System On Chip-VLSI Design - SRAM Cell Design PDFGowtham SpNo ratings yet
- 3QPG1 Cse It CS8351 DPSD QB1Document2 pages3QPG1 Cse It CS8351 DPSD QB1Pragna SidhireddyNo ratings yet
- VLSI Lab Manual - 2022-1Document54 pagesVLSI Lab Manual - 2022-1SuhailNo ratings yet
- Ug772 Xadc WizDocument36 pagesUg772 Xadc Wizpepeluis666No ratings yet