You might also like
- Differential Equations and Fourier Series Exam QuestionsDocument24 pagesDifferential Equations and Fourier Series Exam QuestionsPrudhvi BadeNo ratings yet
- Bilinear Tranformation2Document11 pagesBilinear Tranformation2Ayodele Emmanuel SonugaNo ratings yet
- Modeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABDocument26 pagesModeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABRajesh NayakNo ratings yet
- Review PPT Modified KLJLKDocument30 pagesReview PPT Modified KLJLKPranith KumarNo ratings yet
- Base ExcitationDocument51 pagesBase ExcitationPuneet BahriNo ratings yet
- CLAB1Document4 pagesCLAB1Mohammed GowharNo ratings yet
- A Simple Control Arithmetic of Step Wave Cascaded Multilevel Inverter With Different Voltage StepDocument5 pagesA Simple Control Arithmetic of Step Wave Cascaded Multilevel Inverter With Different Voltage StepSumit HarwaniNo ratings yet
- Constant Parameter Transmission Line: 1 Theoretical BackgroundDocument11 pagesConstant Parameter Transmission Line: 1 Theoretical Backgroundhatay2009No ratings yet
- MIT 6.011 Quiz 1 Signals and SystemsDocument8 pagesMIT 6.011 Quiz 1 Signals and SystemsThắng PyNo ratings yet
- Introduction To Equalization: Guy Wolf Roy Ron Guy ShwartzDocument50 pagesIntroduction To Equalization: Guy Wolf Roy Ron Guy ShwartzShilpi RaiNo ratings yet
- Calculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station PrefaceDocument11 pagesCalculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station Prefaceh_salkicNo ratings yet
- Lecture 9-10 - Frequency Response MethodsDocument68 pagesLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- Analysis of Data From A Batch ReactorDocument35 pagesAnalysis of Data From A Batch ReactorAdhirJNo ratings yet
- Dfig Book PDFDocument29 pagesDfig Book PDFSrinivasan PurushothamanNo ratings yet
- Orbital Mechanics MATLAB Lambert's ProblemDocument24 pagesOrbital Mechanics MATLAB Lambert's ProblempclaudeNo ratings yet
- Finite Element Analysis of Electric Machines - The Solver and Its ApplicationDocument43 pagesFinite Element Analysis of Electric Machines - The Solver and Its ApplicationHarshan ArumugamNo ratings yet
- Discriminator and Energy Based Demodulators: RevisitedDocument4 pagesDiscriminator and Energy Based Demodulators: RevisitedShakeel RanaNo ratings yet
- 2 Chaotical GeneratorsDocument44 pages2 Chaotical GeneratorsMaria ClaytonNo ratings yet
- On The Fundamental Aspects of DemodulationDocument11 pagesOn The Fundamental Aspects of DemodulationAI Coordinator - CSC JournalsNo ratings yet
- RegelTechniek1 2014Document3 pagesRegelTechniek1 2014John AppleseedNo ratings yet
- Gate Ec - 1991:, Vs Zsis =, And - Vt Zt It Vt - T Zt T Ν Ν = Ν Τ ΤDocument13 pagesGate Ec - 1991:, Vs Zsis =, And - Vt Zt It Vt - T Zt T Ν Ν = Ν Τ ΤSanthi SriNo ratings yet
- PH2130C 2006 Exam PaperaDocument7 pagesPH2130C 2006 Exam PaperabbteenagerNo ratings yet
- TOF-40: Time-of-Flight Basics ExplainedDocument15 pagesTOF-40: Time-of-Flight Basics ExplainedZhicheng1 YANGNo ratings yet
- Feedback Control Systems AnalysisDocument43 pagesFeedback Control Systems AnalysisSalmaanCadeXaajiNo ratings yet
- University of Illinois control systems homeworkDocument11 pagesUniversity of Illinois control systems homeworkSaied Aly SalamahNo ratings yet
- RT Exercises and Solutions Med TentatalDocument264 pagesRT Exercises and Solutions Med TentatalSANA100% (1)
- Network Theory-Electrical and Electronics Engineering-The Fourier SeriesDocument16 pagesNetwork Theory-Electrical and Electronics Engineering-The Fourier SeriesMompati Letsweletse100% (1)
- MIT 6.302 Feedback Systems Problem Set 1Document3 pagesMIT 6.302 Feedback Systems Problem Set 1Mahmoud AbuziadNo ratings yet
- Applied Calculus For Business Economics and The Social and Life Sciences 11th Edition Hoffmann Test BankDocument11 pagesApplied Calculus For Business Economics and The Social and Life Sciences 11th Edition Hoffmann Test Banktestbankloo100% (1)
- GATE-Electronics & Comm (ECE) - 2008Document29 pagesGATE-Electronics & Comm (ECE) - 2008Shirshendu PanditNo ratings yet
- GATE ECE Solved Paper - 2005Document24 pagesGATE ECE Solved Paper - 2005Shashi KanthNo ratings yet
- Chapter 3 - MatlabDocument59 pagesChapter 3 - MatlabZe SaNo ratings yet
- Periodic Signals: 1. Application GoalDocument10 pagesPeriodic Signals: 1. Application GoalGabi MaziluNo ratings yet
- An Optimal Balancing Structure For Small and Medium Electrical Machine RotorsDocument9 pagesAn Optimal Balancing Structure For Small and Medium Electrical Machine Rotorsikram09568519No ratings yet
- Lab 1Document11 pagesLab 1Maitha SaeedNo ratings yet
- Web For Principle of Communication - B. Tech 4th SemDocument36 pagesWeb For Principle of Communication - B. Tech 4th SemFurqan Ali Khan100% (1)
- GATE EE 2006 With SolutionsDocument56 pagesGATE EE 2006 With Solutionspwnkumar63100% (1)
- TE Report LastDocument11 pagesTE Report LastManu SwarnkarNo ratings yet
- Chapter 3 Transmission Lines and WaveguidesDocument21 pagesChapter 3 Transmission Lines and WaveguidesRajesh PrabhuNo ratings yet
- Control Systems Unitwise Important Questions Unit 1 Part ADocument10 pagesControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarNo ratings yet
- FDTD (Intro)Document169 pagesFDTD (Intro)Nameeza SultanNo ratings yet
- Pset 1 SolDocument8 pagesPset 1 SolLJOCNo ratings yet
- Krylov methods reduce large FEM modelsDocument30 pagesKrylov methods reduce large FEM modelsgorot1No ratings yet
- Detailed Solution of IES 2103 (ECE) Objective Paper - I: Set - A'Document12 pagesDetailed Solution of IES 2103 (ECE) Objective Paper - I: Set - A'vijaynarayan guptaNo ratings yet
- Ece503 ps04Document5 pagesEce503 ps04Rushabh MehtaNo ratings yet
- Hw3 Chap4 SolutionDocument13 pagesHw3 Chap4 Solutioncoasterfan13100% (1)
- GATE EE 2005 Q1-30 one mark questionsDocument17 pagesGATE EE 2005 Q1-30 one mark questionsvims124No ratings yet
- Finalexam 2013Document5 pagesFinalexam 2013RezaNo ratings yet
- Compilation of Matlab Problems and SolutionsDocument14 pagesCompilation of Matlab Problems and SolutionsGem AguimbagNo ratings yet
- Control System Lab Manual by AMIT KUMARDocument35 pagesControl System Lab Manual by AMIT KUMARamit kumar83% (6)
- Golay CodesDocument50 pagesGolay CodesdshgjklopNo ratings yet
- Homework 4Document2 pagesHomework 4dogudoguNo ratings yet
- Engineering Academy: MOCK GATE (2012) - 2Document12 pagesEngineering Academy: MOCK GATE (2012) - 2shrish9999No ratings yet
- Antenna Azimuth Position Control System Modelling, AnalysisDocument30 pagesAntenna Azimuth Position Control System Modelling, AnalysisMbongeni Maxwell100% (3)
- St. Joseph'S College of Engineering Department of Ece Multiple Choice Questions (MCQ) Subject: Ec 8553-Discrete Time Signal Processing (Unit I)Document65 pagesSt. Joseph'S College of Engineering Department of Ece Multiple Choice Questions (MCQ) Subject: Ec 8553-Discrete Time Signal Processing (Unit I)formyphdNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- 12 Ports Ieee Access Paper 2020Document9 pages12 Ports Ieee Access Paper 2020mujeeb.abdullah2830No ratings yet
- Compact Eight-Antenna MIMO Array for 5G SmartphonesDocument9 pagesCompact Eight-Antenna MIMO Array for 5G Smartphonesmujeeb.abdullah2830No ratings yet
- Negative Refraction: Contemporary PhysicsDocument13 pagesNegative Refraction: Contemporary Physicsmujeeb.abdullah2830No ratings yet
- Postgraduate Studies: Scholarships Programs ForDocument6 pagesPostgraduate Studies: Scholarships Programs ForAFTAB GAMBHIRNo ratings yet
- Sample Letter WelcomingDocument1 pageSample Letter Welcomingmujeeb.abdullah2830No ratings yet
- A Low Q Electrically Small Magnetic (TE Mode) Dipole: Steven R. Best, Fellow, IEEEDocument4 pagesA Low Q Electrically Small Magnetic (TE Mode) Dipole: Steven R. Best, Fellow, IEEEmujeeb.abdullah2830No ratings yet
- Launching of Web-Tv For KP GovernmentDocument8 pagesLaunching of Web-Tv For KP Governmentmujeeb.abdullah2830No ratings yet
- EE 4382 - Antenna Engineering Course SyllabusDocument5 pagesEE 4382 - Antenna Engineering Course SyllabusMahmoud IsmailNo ratings yet
- Letter of Complaint Useful Phrases and ExampleDocument4 pagesLetter of Complaint Useful Phrases and ExampleTinh NguyenNo ratings yet
- Final Seniority List of Excise & Taxation Officers (Bs-18) of Excise, Taxation & Narcotics Control, Khyber PakhtunkhwaDocument3 pagesFinal Seniority List of Excise & Taxation Officers (Bs-18) of Excise, Taxation & Narcotics Control, Khyber Pakhtunkhwamujeeb.abdullah2830No ratings yet
- EE 4382 - Antenna Engineering Course SyllabusDocument5 pagesEE 4382 - Antenna Engineering Course SyllabusMahmoud IsmailNo ratings yet
- ECE 54000 Antenna Design, Analysis and Simulation Methods: Course DescriptionDocument3 pagesECE 54000 Antenna Design, Analysis and Simulation Methods: Course Descriptionmujeeb.abdullah2830No ratings yet
- Representing Integer Data: ITEC 1011 Introduction To Information TechnologiesDocument27 pagesRepresenting Integer Data: ITEC 1011 Introduction To Information Technologiesmujeeb.abdullah2830No ratings yet
- Electronics Overview: Basic Circuits, Power Supplies, Transistors, Cable ImpedanceDocument36 pagesElectronics Overview: Basic Circuits, Power Supplies, Transistors, Cable ImpedanceOxymoronic BlasphemyNo ratings yet
- S.No Position With Bps (Equivalent) Required Qualification & Experience Faculty Positions A. Education: PHD Degree in Relevant FieldDocument4 pagesS.No Position With Bps (Equivalent) Required Qualification & Experience Faculty Positions A. Education: PHD Degree in Relevant Fieldmujeeb.abdullah2830No ratings yet
- Introduction To Wireless MIMO - Theory and ApplicationsDocument63 pagesIntroduction To Wireless MIMO - Theory and Applicationskokusz76100% (2)
- Antennas PropagationDocument40 pagesAntennas PropagationSafura BegumNo ratings yet
- Electric Current: Flow, Measurement and EffectsDocument36 pagesElectric Current: Flow, Measurement and EffectstaufiqstuneNo ratings yet
- Template Letter of OfferDocument2 pagesTemplate Letter of OfferJaneIvyDio88No ratings yet
- IETE Paper AntennaDocument11 pagesIETE Paper Antennamujeeb.abdullah2830No ratings yet
- Sweden CA MimoDocument4 pagesSweden CA Mimomujeeb.abdullah2830No ratings yet
- Paper 2 Antenna PDFDocument18 pagesPaper 2 Antenna PDFmujeeb.abdullah2830No ratings yet
- Germany CA Mimo Ieee PaperDocument5 pagesGermany CA Mimo Ieee Papermujeeb.abdullah2830No ratings yet
- Paper AntennaDocument4 pagesPaper Antennamujeeb.abdullah2830No ratings yet
- Uliopilase Toend PraktikaDocument1 pageUliopilase Toend PraktikaeshuNo ratings yet
- Four Antenna Slot Improve ImpendanceDocument4 pagesFour Antenna Slot Improve Impendancemujeeb.abdullah2830No ratings yet
- Job - Joining ReportDocument1 pageJob - Joining Reportmujeeb.abdullah2830No ratings yet
- New Zealand Patent Application AnalyzedDocument3 pagesNew Zealand Patent Application Analyzedmujeeb.abdullah2830No ratings yet
- Uk Share LatexDocument1 pageUk Share Latexmujeeb.abdullah2830No ratings yet
- Journal Manuscript Format MS Office 2007Document3 pagesJournal Manuscript Format MS Office 2007mujeeb.abdullah2830No ratings yet
- SQL Server 2008 Failover ClusteringDocument176 pagesSQL Server 2008 Failover ClusteringbiplobusaNo ratings yet
- Philips DVD Player SpecificationsDocument2 pagesPhilips DVD Player Specificationsbhau_20No ratings yet
- Obligations and Contracts Bar Questions and Answers PhilippinesDocument3 pagesObligations and Contracts Bar Questions and Answers PhilippinesPearl Aude33% (3)
- NameDocument5 pagesNameMaine DagoyNo ratings yet
- Injection Timing (5L) : InspectionDocument2 pagesInjection Timing (5L) : InspectionaliNo ratings yet
- ExpDocument425 pagesExpVinay KamatNo ratings yet
- Covey - Moral CompassingDocument5 pagesCovey - Moral CompassingAsimNo ratings yet
- SYNOPSIS - Impact of GST On Small Traders!Document21 pagesSYNOPSIS - Impact of GST On Small Traders!Laxmi PriyaNo ratings yet
- Environmental Assessment of Sewer ConstructionDocument32 pagesEnvironmental Assessment of Sewer ConstructionKaleab TadesseNo ratings yet
- Machine Learning: Bilal KhanDocument26 pagesMachine Learning: Bilal KhanBilal KhanNo ratings yet
- Ramdump Memshare GPS 2019-04-01 09-39-17 PropsDocument11 pagesRamdump Memshare GPS 2019-04-01 09-39-17 PropsArdillaNo ratings yet
- NGPDU For BS SelectDocument14 pagesNGPDU For BS SelectMario RamosNo ratings yet
- Unit 1 - Introduction To BankingDocument17 pagesUnit 1 - Introduction To Bankingc08No ratings yet
- WWW - Istructe.pdf FIP UKDocument4 pagesWWW - Istructe.pdf FIP UKBunkun15No ratings yet
- Lady Allen On Froebel Training School, Emdrup, CopenhagenDocument5 pagesLady Allen On Froebel Training School, Emdrup, CopenhagenLifeinthemix_FroebelNo ratings yet
- Socially Responsible CompaniesDocument2 pagesSocially Responsible CompaniesItzman SánchezNo ratings yet
- Department of Education: Weekly Home Learning Plan Grade Ii Fourth Quarter Week 8Document8 pagesDepartment of Education: Weekly Home Learning Plan Grade Ii Fourth Quarter Week 8Evelyn DEL ROSARIONo ratings yet
- How To Check PC Full Specs Windows 10 in 5 Ways (Minitool News)Document19 pagesHow To Check PC Full Specs Windows 10 in 5 Ways (Minitool News)hiwot kebedeNo ratings yet
- SD-SCD-QF75 - Factory Audit Checklist - Rev.1 - 16 Sept.2019Document6 pagesSD-SCD-QF75 - Factory Audit Checklist - Rev.1 - 16 Sept.2019Lawrence PeNo ratings yet
- Post Marketing SurveillanceDocument19 pagesPost Marketing SurveillanceRamanjeet SinghNo ratings yet
- Application of ISO/IEC 17020:2012 For The Accreditation of Inspection BodiesDocument14 pagesApplication of ISO/IEC 17020:2012 For The Accreditation of Inspection BodiesWilson VargasNo ratings yet
- Emergency Room Delivery RecordDocument7 pagesEmergency Room Delivery RecordMariel VillamorNo ratings yet
- Second Law of EntrophyDocument22 pagesSecond Law of EntrophyMia Betia BalmacedaNo ratings yet
- The Sound Collector - The Prepared Piano of John CageDocument12 pagesThe Sound Collector - The Prepared Piano of John CageLuigie VazquezNo ratings yet
- Environment ManagerDocument234 pagesEnvironment ManagerAbhishek kumarNo ratings yet
- ROPE TENSIONER Product-Catalog-2019Document178 pagesROPE TENSIONER Product-Catalog-2019jeedanNo ratings yet
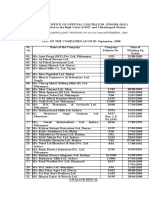
- Statement of Compulsory Winding Up As On 30 SEPTEMBER, 2008Document4 pagesStatement of Compulsory Winding Up As On 30 SEPTEMBER, 2008abchavhan20No ratings yet
- Newcomers Guide To The Canadian Job MarketDocument47 pagesNewcomers Guide To The Canadian Job MarketSS NairNo ratings yet
- Spsi RDocument2 pagesSpsi RBrandy ANo ratings yet
- Desert Power India 2050Document231 pagesDesert Power India 2050suraj jhaNo ratings yet