You might also like
- ANOVA Analysis of Variance TechniquesDocument57 pagesANOVA Analysis of Variance TechniquesLiza Lorena C. JalaNo ratings yet
- Monte Carlo SimulationDocument22 pagesMonte Carlo SimulationWillinton GutierrezNo ratings yet
- MATLAB Course Session 1 Introduction To Modelling and SimulationDocument59 pagesMATLAB Course Session 1 Introduction To Modelling and SimulationMahamod IsmailNo ratings yet
- Engineering Statistics Handbook 2003Document1,522 pagesEngineering Statistics Handbook 2003d-fbuser-67904250No ratings yet
- Simulation Models for System AnalysisDocument183 pagesSimulation Models for System AnalysisMujeeb Abdullah100% (1)
- Why Most Investors FailDocument2 pagesWhy Most Investors FailINo ratings yet
- Ace Your Data Science Interview with These Study NotesDocument7 pagesAce Your Data Science Interview with These Study NotesDănuț DanielNo ratings yet
- Modeling and Simulation of C&C NetworkDocument53 pagesModeling and Simulation of C&C NetworkMahamod IsmailNo ratings yet
- DATA SCIENCE INTERVIEW PREPARATION: V-NET ARCHITECTURE FOR BIOMEDICAL IMAGE SEGMENTATIONDocument16 pagesDATA SCIENCE INTERVIEW PREPARATION: V-NET ARCHITECTURE FOR BIOMEDICAL IMAGE SEGMENTATIONJulian TolosaNo ratings yet
- 101 Business Ideas Under 40 CharactersDocument9 pages101 Business Ideas Under 40 CharactersSunil KumarNo ratings yet
- OPERATIONAL RESEARCH IntroductionDocument38 pagesOPERATIONAL RESEARCH IntroductionSurya Prakash TNo ratings yet
- DESCRIPTIVE ANALYTICS PPT - UpdatedDocument127 pagesDESCRIPTIVE ANALYTICS PPT - UpdatedKEERTHANA DEVI ANo ratings yet
- Solving Telecommunication Research Problem Using MATLABDocument117 pagesSolving Telecommunication Research Problem Using MATLABMahamod IsmailNo ratings yet
- Basic Statistics 6 Sample Vs Population DistributionsDocument26 pagesBasic Statistics 6 Sample Vs Population DistributionsJay Ann DomeNo ratings yet
- Dynamic ProgrammingDocument52 pagesDynamic ProgrammingVaranasi SrikarNo ratings yet
- 2003 Makipaa 1Document15 pages2003 Makipaa 1faizal rizkiNo ratings yet
- Regression Analysis in Machine LearningDocument26 pagesRegression Analysis in Machine Learningvepowo LandryNo ratings yet
- Machine Learning Approachs (AI)Document11 pagesMachine Learning Approachs (AI)Abhishek Gupta100% (1)
- ForecastMETHODS TECHNIQUESDocument116 pagesForecastMETHODS TECHNIQUESVenkata Nelluri Pmp100% (1)
- Sampling PDFDocument120 pagesSampling PDFHamid HusainNo ratings yet
- Lecture Note 2 - Forecasting TrendsDocument60 pagesLecture Note 2 - Forecasting TrendsAshraf AhmedNo ratings yet
- Nursing Research StatisticsDocument7 pagesNursing Research StatisticsAbi RajanNo ratings yet
- Note 5Document26 pagesNote 5George MpalasNo ratings yet
- Radial Basis Functions With Adaptive Input and Composite Trend Representation For Portfolio SelectionDocument13 pagesRadial Basis Functions With Adaptive Input and Composite Trend Representation For Portfolio SelectionAlvaro Sebastian100% (1)
- Parts of Science Investigatory Project (SIPDocument25 pagesParts of Science Investigatory Project (SIPTino PandomaNo ratings yet
- 5G BeamformingDocument88 pages5G BeamformingMahamod IsmailNo ratings yet
- Research DesignDocument11 pagesResearch DesignAastha Vyas0% (1)
- Simulation Applications & InsightsDocument19 pagesSimulation Applications & InsightsAbhijeet SinghNo ratings yet
- Bayesian Approach For Animal Breeding Data AnalysisDocument42 pagesBayesian Approach For Animal Breeding Data AnalysisGopal Gowane50% (2)
- Effects of Social Media On SocietyDocument17 pagesEffects of Social Media On SocietyPooja RamNo ratings yet
- Data PreparationDocument28 pagesData PreparationnaveengargnsNo ratings yet
- ARIMA ForecastingDocument9 pagesARIMA Forecastingilkom12No ratings yet
- Univariate Time Series Analysis With Matlab - M. PerezDocument147 pagesUnivariate Time Series Analysis With Matlab - M. Perezvincus27No ratings yet
- Modeling and Simulation: Amr El MougyDocument32 pagesModeling and Simulation: Amr El Mougyfahadabbas11No ratings yet
- Linear Algebra for Business AnalyticsDocument27 pagesLinear Algebra for Business AnalyticsBom VillatuyaNo ratings yet
- Random ForestDocument83 pagesRandom ForestBharath Reddy MannemNo ratings yet
- Ex Simulare Monte Carlo - Ex Din ExcelDocument14 pagesEx Simulare Monte Carlo - Ex Din ExcelIulia TacheNo ratings yet
- Jawaharlal Nehru Technological University: School of Management StudiesDocument8 pagesJawaharlal Nehru Technological University: School of Management StudiesNeeharaNo ratings yet
- 7 OLS AssumptionsDocument37 pages7 OLS AssumptionsSaitejNo ratings yet
- Full Stats NotesDocument126 pagesFull Stats NotesSamantha KarindiraNo ratings yet
- Introduction Investment PlanningDocument5 pagesIntroduction Investment Planningapi-3770163No ratings yet
- Time SeriesDocument59 pagesTime SeriesMeonghun LeeNo ratings yet
- CH 3 Probability TheoryDocument14 pagesCH 3 Probability TheoryPoint BlankNo ratings yet
- Chapin S., Young T. The MATLAB Workbook - A Supplement For Calculus, Differential Equations and Linear Algebra (2003) (En) (73s)Document73 pagesChapin S., Young T. The MATLAB Workbook - A Supplement For Calculus, Differential Equations and Linear Algebra (2003) (En) (73s)Miguel SaavedraNo ratings yet
- Queuing Analysis: Chapter OutlineDocument22 pagesQueuing Analysis: Chapter OutlineMike SerquinaNo ratings yet
- M.C.A. (Sem - III) Operation Research PDFDocument161 pagesM.C.A. (Sem - III) Operation Research PDFanas_pm100% (1)
- Logistic Regression ExampleDocument22 pagesLogistic Regression ExampleLUV ARORA100% (1)
- Statistical Foundation For Analytics-Module 1Document18 pagesStatistical Foundation For Analytics-Module 1VikramAditya RattanNo ratings yet
- CA 2mark and 16 Mark With AnswerDocument112 pagesCA 2mark and 16 Mark With AnswerOmprakash DNo ratings yet
- BRM Data Analysis TechniquesDocument53 pagesBRM Data Analysis TechniquesS- AjmeriNo ratings yet
- Monte CarloDocument14 pagesMonte CarlohltanNo ratings yet
- CheatsheetOO LetterDocument4 pagesCheatsheetOO LetterniloyrayNo ratings yet
- Ch11Integer Goal ProgrammingDocument54 pagesCh11Integer Goal ProgrammingAngelina WattssNo ratings yet
- Presentation Lecture 1 INDU 6111Document36 pagesPresentation Lecture 1 INDU 6111Vinoth RamaiahNo ratings yet
- Review of Capital City Strategic Planning SystemsDocument271 pagesReview of Capital City Strategic Planning SystemsABC News Online100% (1)
- Markov ChainsDocument63 pagesMarkov ChainsIbrahim El SharNo ratings yet
- Unit 9 - SimulationDocument17 pagesUnit 9 - SimulationSarvar PathanNo ratings yet
- Simulation of Plant Scale ManufacturingDocument6 pagesSimulation of Plant Scale ManufacturingTim ChegeNo ratings yet
- Input AnalysisDocument14 pagesInput AnalysisNovie Tyas Noegroho NingroemNo ratings yet
- Probability and Computing Lecture NotesDocument252 pagesProbability and Computing Lecture NotesAl AreefNo ratings yet
- Throttle Body Assembly Line Balancing - Case Study VIDocument21 pagesThrottle Body Assembly Line Balancing - Case Study VISantosh GangwarNo ratings yet
- Modeling and Simulation of Communication and Computer NetworksDocument34 pagesModeling and Simulation of Communication and Computer NetworksUkAYsNo ratings yet
- Tawanda Mushiri Monte Carlo SimulationDocument17 pagesTawanda Mushiri Monte Carlo SimulationoscarNo ratings yet
- Software Testing and ConceptsDocument12 pagesSoftware Testing and ConceptspeterNo ratings yet
- Lesson-1 Modeling and SimulationDocument24 pagesLesson-1 Modeling and SimulationSundaramali Govindaswamy GNo ratings yet
- Ans: - Continous and Discrete Simulation ModelDocument6 pagesAns: - Continous and Discrete Simulation ModelAnitesh SaundersNo ratings yet
- Benefits From The Story of Prophet Yusuf PT 2Document14 pagesBenefits From The Story of Prophet Yusuf PT 2viquarul3109No ratings yet
- Qualnet AssignmentDocument29 pagesQualnet AssignmentMahamod IsmailNo ratings yet
- KKKT 4034 - Class ToolsDocument4 pagesKKKT 4034 - Class ToolsMahamod IsmailNo ratings yet
- Benefits From The Story of Prophet Yusuf PT 1Document12 pagesBenefits From The Story of Prophet Yusuf PT 1viquarul3109No ratings yet
- 2004 IJCIS Soltane PaperDocument8 pages2004 IJCIS Soltane PaperMahamod IsmailNo ratings yet
- Keynote SCOReD2016Document61 pagesKeynote SCOReD2016Mahamod Ismail100% (1)
- Keynote ICESReD2016Document54 pagesKeynote ICESReD2016Mahamod IsmailNo ratings yet
- 2016 Plos One YusorDocument24 pages2016 Plos One YusorMahamod IsmailNo ratings yet
- Keynote ICWT2016 5G BeamformingDocument89 pagesKeynote ICWT2016 5G BeamformingMahamod Ismail100% (3)
- VANETDocument17 pagesVANETMahamod IsmailNo ratings yet
- 2013 Procedia Technology SawsanDocument8 pages2013 Procedia Technology SawsanMahamod IsmailNo ratings yet
- APCC2012 - Chan - FinalDocument1 pageAPCC2012 - Chan - FinalMahamod IsmailNo ratings yet
- 2014 PHD MahaDocument172 pages2014 PHD MahaMahamod IsmailNo ratings yet
- KT6274 Lecture 5 - ProjectDocument50 pagesKT6274 Lecture 5 - ProjectMahamod IsmailNo ratings yet
- 2013 Procedia Technology MojtabaDocument7 pages2013 Procedia Technology MojtabaMahamod IsmailNo ratings yet
- Modeling and Simulation of C&C NetworkDocument1 pageModeling and Simulation of C&C NetworkMahamod IsmailNo ratings yet
- KT6274 Lecture 5Document56 pagesKT6274 Lecture 5Mahamod IsmailNo ratings yet
- Mobile Communication: Monitoring Network ActivitiesDocument17 pagesMobile Communication: Monitoring Network ActivitiesMahamod IsmailNo ratings yet
- KT6274 Lecture 1Document35 pagesKT6274 Lecture 1Mahamod IsmailNo ratings yet
- KT6274 Lecture 1Document35 pagesKT6274 Lecture 1Mahamod IsmailNo ratings yet
- 2nd Quarter PR 2 REVIEWERDocument5 pages2nd Quarter PR 2 REVIEWERReggie AlarcioNo ratings yet
- 6220010Document37 pages6220010Huma AshrafNo ratings yet
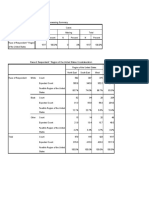
- Chi square test results for relationship between race and regionDocument4 pagesChi square test results for relationship between race and regionfaisalshafiq1No ratings yet
- Thesis Kwalitatief OnderzoekDocument4 pagesThesis Kwalitatief Onderzoekafkodkedr100% (2)
- Conflicts and Solutions in Tempe Lake RevitalizationDocument12 pagesConflicts and Solutions in Tempe Lake RevitalizationFadliadi SadliNo ratings yet
- Imrd Format 2020-2021Document14 pagesImrd Format 2020-2021BeaNo ratings yet
- Basic Econometrics Revision - Econometric ModellingDocument65 pagesBasic Econometrics Revision - Econometric ModellingTrevor ChimombeNo ratings yet
- Chapter 4 Statistical Inference in Quality Control and ImprovementDocument106 pagesChapter 4 Statistical Inference in Quality Control and ImprovementEfraim John Hernandez100% (1)
- BCS-DS-602: Machine Learning: Dr. Sarika Chaudhary Associate Professor Fet-CseDocument18 pagesBCS-DS-602: Machine Learning: Dr. Sarika Chaudhary Associate Professor Fet-CseAnonmity worldNo ratings yet
- Activity 4.2 Problems For Z-Test and T-Test Statistics: Group WorkDocument1 pageActivity 4.2 Problems For Z-Test and T-Test Statistics: Group WorkJames CantorneNo ratings yet
- Reviewing Related LiteratureDocument7 pagesReviewing Related Literaturetheresa balaticoNo ratings yet
- Gateways 16e GuidedNotes Chapter1.4Document2 pagesGateways 16e GuidedNotes Chapter1.4Rozita WahabNo ratings yet
- Game-Based Learning: Leveraging Digital Technology Simulations For Educational ImpactDocument11 pagesGame-Based Learning: Leveraging Digital Technology Simulations For Educational Impactindex PubNo ratings yet
- Vit Syllabus 6th Sem EceDocument15 pagesVit Syllabus 6th Sem Ecepranavateja12399No ratings yet
- White Paper Quantos Gravimetric enDocument20 pagesWhite Paper Quantos Gravimetric enportesfernandoNo ratings yet
- Grade 9 Statistics: Data Collection and SummationDocument6 pagesGrade 9 Statistics: Data Collection and SummationKaren Loremia TapecNo ratings yet
- Design of Experiments - Basic Concepts - Treatment - Experimental Unit - Experimental Error - Basic Principle - Replication, Randomization and Local Control.Document3 pagesDesign of Experiments - Basic Concepts - Treatment - Experimental Unit - Experimental Error - Basic Principle - Replication, Randomization and Local Control.D K SRIVASTAVANo ratings yet
- f9e88e2f575a3cf66efc8dbf1e6cf715Document3 pagesf9e88e2f575a3cf66efc8dbf1e6cf715vish7550% (2)
- Advertising in Context of ': A Project Report ONDocument68 pagesAdvertising in Context of ': A Project Report ONRahul Pansuriya100% (1)
- Format of Synopsis: Research Methodology, Biostatistics & Medical Writing WorkshopDocument2 pagesFormat of Synopsis: Research Methodology, Biostatistics & Medical Writing WorkshopManjunath ShettyNo ratings yet
- ANNOVADocument2 pagesANNOVAdivi86No ratings yet
- ISAD - HW 2 Information Gathering Unobtrusive Methods Review QuestionsDocument3 pagesISAD - HW 2 Information Gathering Unobtrusive Methods Review QuestionsKathleen AgustinNo ratings yet
- Statistical Analysis in Neuroimaging: T-tests, ANOVAs, and RegressionDocument39 pagesStatistical Analysis in Neuroimaging: T-tests, ANOVAs, and RegressionWork PlaceNo ratings yet
- STA 342-TH8-Neyman-PearsonDocument18 pagesSTA 342-TH8-Neyman-Pearsonsolomon mwatiNo ratings yet
- Time Series With EViews PDFDocument37 pagesTime Series With EViews PDFashishankurNo ratings yet
- ANALYSIES AIRPORT PASSENGER AND CARGO MOVEMENT MODELSDocument14 pagesANALYSIES AIRPORT PASSENGER AND CARGO MOVEMENT MODELSNitha RahayuNo ratings yet