You might also like
- Permutaciones PDFDocument6 pagesPermutaciones PDFMilagrosNievesEspinozaNo ratings yet
- 1ro SecundariaDocument35 pages1ro Secundariamarlo sislaNo ratings yet
- Metodos de Programacion de RobotsDocument20 pagesMetodos de Programacion de RobotsDavid Shure XivNo ratings yet
- 1.5 AplicacionesDocument19 pages1.5 AplicacionesErick Perez PalaciosNo ratings yet
- Impresic3b3n 3d para Profesores 08-10-2017Document24 pagesImpresic3b3n 3d para Profesores 08-10-2017GeviNo ratings yet
- Impresión 3DDocument3 pagesImpresión 3DEduardo Alvarez MaldonadoNo ratings yet
- Guia Prestaciones Del ProductoDocument8 pagesGuia Prestaciones Del ProductoantonioherediaNo ratings yet
- Tutorial Soft ESP32Document15 pagesTutorial Soft ESP32cynthiNo ratings yet
- Programacion Ladder Lectura 1Document15 pagesProgramacion Ladder Lectura 1Anonymous izV0H777jkNo ratings yet
- Robots y Juguetes Autónomos Una OportunidadDocument7 pagesRobots y Juguetes Autónomos Una OportunidadPrincess Danny FiallosNo ratings yet
- Conectar Arduino UNO A Un PC Con W7Document16 pagesConectar Arduino UNO A Un PC Con W7eon_eternoNo ratings yet
- Laboratorio 4 - Configuracion de PLC SchneiderDocument16 pagesLaboratorio 4 - Configuracion de PLC SchneiderZamora Ventura JhossepNo ratings yet
- Folleto de Control Automático 2008 A. AguinagaDocument57 pagesFolleto de Control Automático 2008 A. AguinagaMariela BelénNo ratings yet
- Creación e Implementación de Un Software para La Automatización Del Registro de Matrícula de Los Estudiantes en El Centro de Educación BásicaDocument20 pagesCreación e Implementación de Un Software para La Automatización Del Registro de Matrícula de Los Estudiantes en El Centro de Educación BásicaChined Alfaro100% (1)
- Proyecto MirosotDocument20 pagesProyecto MirosotSebastian Miguel Cáceres HuamánNo ratings yet
- Ohmetro Equipo4Document4 pagesOhmetro Equipo4Edgar SuárezNo ratings yet
- Morfología Del RobotDocument18 pagesMorfología Del RobotM Sc Marco Antonio Canchola100% (1)
- Intro EmbebidosDocument34 pagesIntro EmbebidosHarry PradoNo ratings yet
- Aprender Robótica Desde CeroDocument2 pagesAprender Robótica Desde Ceroenrique martinoNo ratings yet
- Revista Somos Mecatrónica Marzo 2011-1Document26 pagesRevista Somos Mecatrónica Marzo 2011-1RonaldNo ratings yet
- Sistemas Embebidos FPGADocument91 pagesSistemas Embebidos FPGAcarlos.otiniano9811No ratings yet
- Tema 2 - Morfología Del RobotDocument44 pagesTema 2 - Morfología Del RobotDulce VelizNo ratings yet
- Revista Somos Mecatronica Febrero 2011-1 PDFDocument33 pagesRevista Somos Mecatronica Febrero 2011-1 PDFAlex CaamañoNo ratings yet
- Guia Impresión 3DDocument56 pagesGuia Impresión 3D_guybrush_No ratings yet
- DRONESDocument65 pagesDRONESEder GuzmánNo ratings yet
- S01.s2 - MaterialDocument15 pagesS01.s2 - Materialdavid Arevalo ToroNo ratings yet
- UnoArduSim FullHelp EsDocument45 pagesUnoArduSim FullHelp EsJosé Ramón TorresNo ratings yet
- Micropython ESP32 Parte 2Document8 pagesMicropython ESP32 Parte 2jimmyNo ratings yet
- Librerias ArduinoDocument9 pagesLibrerias ArduinoMichelle SalazarNo ratings yet
- Equipo2 Ev4 IarDocument19 pagesEquipo2 Ev4 IarSalma RuízNo ratings yet
- Manual ProteusDocument14 pagesManual ProteusGA16DETNo ratings yet
- Proyecto Innovador Mano ArticuladaDocument66 pagesProyecto Innovador Mano ArticuladaOscar Altamirano SilvaNo ratings yet
- Control DinamicoDocument11 pagesControl DinamicoÁngeles Campaña Olmos100% (1)
- Red Neuronal OCRDocument30 pagesRed Neuronal OCRklefo100% (1)
- Clase 20. Arduino SimulinkDocument9 pagesClase 20. Arduino SimulinkYayitaLeonaB.VanegasNo ratings yet
- Curso de Robótica 1Document9 pagesCurso de Robótica 1Guillermo Chacon AcevedoNo ratings yet
- Ascensor de 5 PisosDocument8 pagesAscensor de 5 PisosLane ClaudioNo ratings yet
- 2016 Libro SistemasEmbebidos PDFDocument67 pages2016 Libro SistemasEmbebidos PDFLeonardo Vargas PeñaNo ratings yet
- Acuña Michael Sistema Video VigilanciaDocument122 pagesAcuña Michael Sistema Video Vigilanciahumberto_guerrero_taboadaNo ratings yet
- Curso de Microcontroladores Pic18f4550Document69 pagesCurso de Microcontroladores Pic18f4550ingmontoya704754100% (2)
- Guía para El Desarrollo Del Componente Práctico - Desarrollar El Componente Práctico Presencial PDFDocument26 pagesGuía para El Desarrollo Del Componente Práctico - Desarrollar El Componente Práctico Presencial PDFEdier OliverosNo ratings yet
- Robot MensajeroDocument6 pagesRobot MensajeroChristian JiménezNo ratings yet
- TDD-2208 Internet de Las CosasDocument11 pagesTDD-2208 Internet de Las CosasVic PereaNo ratings yet
- Introducción Pic18F4550Document13 pagesIntroducción Pic18F4550Lázaro López PuenteNo ratings yet
- Diapositivas de RobóticaDocument7 pagesDiapositivas de RobóticaKary CastilloNo ratings yet
- Ardu BlockDocument11 pagesArdu Blockmicky_vxNo ratings yet
- Manual de Interfaz Arduino PDFDocument39 pagesManual de Interfaz Arduino PDFDante LlerenaNo ratings yet
- Siglas UnadDocument4 pagesSiglas UnadLeidicitha Madrigal CNo ratings yet
- El Robot Proton de ElektorDocument3 pagesEl Robot Proton de ElektorMoisesNo ratings yet
- Contenido TemáticoDocument32 pagesContenido Temáticoeduardo_benitez_18No ratings yet
- Diseño RobotsDocument170 pagesDiseño Robotsmartin_s_29100% (1)
- Retos Arduino-Básico 1Document7 pagesRetos Arduino-Básico 1Victor Alfaro PatracaNo ratings yet
- Evaluación de Sensores para Su Conexión A Tarjeta ArduinoDocument137 pagesEvaluación de Sensores para Su Conexión A Tarjeta Arduinopaco1805No ratings yet
- Diseno Sistemas Digitales IIDocument184 pagesDiseno Sistemas Digitales IICarlos ColmenarezNo ratings yet
- ARDUINODocument30 pagesARDUINOJuan BustamanteNo ratings yet
- Robotic ADocument27 pagesRobotic AJorge E Ortega Lopez100% (1)
- Introduccion LabviewDocument59 pagesIntroduccion LabviewDaniel JaramilloNo ratings yet
- Memristor: Una nueva era de aplicaciones más allá de la ley de Moore para la computaciónFrom EverandMemristor: Una nueva era de aplicaciones más allá de la ley de Moore para la computaciónNo ratings yet
- Sistemas de Control en IngenieriaDocument12 pagesSistemas de Control en Ingenieriadavid_kunNo ratings yet
- Auto Lava Do en LabviewDocument9 pagesAuto Lava Do en Labviewdavid_kun0% (1)
- Tabla Transformada Laplace ZetaDocument2 pagesTabla Transformada Laplace Zetadavid_kunNo ratings yet
- Auto Lava Do en LabviewDocument9 pagesAuto Lava Do en Labviewdavid_kun0% (1)
- Auto Lava Do en LabviewDocument9 pagesAuto Lava Do en Labviewdavid_kun0% (1)
- Ensayo de La Unidad 6 Y7Document4 pagesEnsayo de La Unidad 6 Y7david_kunNo ratings yet
- MTF-1025 - RobóticaDocument16 pagesMTF-1025 - RobóticavicocalanNo ratings yet
- Elementos Maquinas y Vibraciones-Jesus M Pintor Borobia PDFDocument243 pagesElementos Maquinas y Vibraciones-Jesus M Pintor Borobia PDFdavid_kun100% (1)
- Unidad 4 ControladoresDocument20 pagesUnidad 4 Controladoresdavid_kunNo ratings yet
- Medidores de Caudal o FlujoDocument15 pagesMedidores de Caudal o Flujodavid_kunNo ratings yet
- Medidores de Caudal o FlujoDocument15 pagesMedidores de Caudal o Flujodavid_kunNo ratings yet
- ManualrecienDocument9 pagesManualreciendavid_kunNo ratings yet
- Introducción A La Instrumentacion IndustrialDocument4 pagesIntroducción A La Instrumentacion Industrialdavid_kunNo ratings yet
- Aplicación de La Planeación en Las Distintas Áreas Funcionales de La EmpresaDocument2 pagesAplicación de La Planeación en Las Distintas Áreas Funcionales de La Empresadavid_kun100% (2)
- InterferometrosDocument17 pagesInterferometrosArthur MeRaNo ratings yet
- AnalfabetismoDocument9 pagesAnalfabetismoAmtoo BustamanteNo ratings yet
- La HistologíaDocument1 pageLa Histologíadavid_kunNo ratings yet
- Kana para Recordar ObsequioDocument20 pagesKana para Recordar ObsequioFranzyzko MarínNo ratings yet
- Planeación y Organización TécnicaDocument38 pagesPlaneación y Organización TécnicaDannesa NavarroNo ratings yet
- Formato AAAr113Document8 pagesFormato AAAr113James CastilloNo ratings yet
- Avance Libro Hackers en WindowsDocument28 pagesAvance Libro Hackers en WindowsKEREN CESIA NINA RAMOSNo ratings yet
- Seguros Ley 1883Document6 pagesSeguros Ley 1883Veronica Cruz quispeNo ratings yet
- Fortunas Del FeminismoDocument21 pagesFortunas Del FeminismoCindy ParthenopaeusNo ratings yet
- Evaluación SumativaDocument3 pagesEvaluación SumativaGlenda Auristela Castellano CevallosNo ratings yet
- Diagnóstico Epidemia Psíquica - Artículo de Paul LevyDocument14 pagesDiagnóstico Epidemia Psíquica - Artículo de Paul LevyGladysMolinaNo ratings yet
- Las Cinco P'S de La EstrategiaDocument3 pagesLas Cinco P'S de La Estrategiaale ortizNo ratings yet
- Rueda de Maxwell PDFDocument7 pagesRueda de Maxwell PDFdavidcp107No ratings yet
- Vertiv GXT4 6-10kva - Hoja de DatosDocument8 pagesVertiv GXT4 6-10kva - Hoja de DatosGermanYPNo ratings yet
- Televisión HJZLDocument3 pagesTelevisión HJZLJosue LagosNo ratings yet
- Monteza LWDocument73 pagesMonteza LWJenniferMNo ratings yet
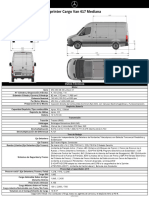
- Sprinter CargoVan 417 Mediana - 90764313-MXFDocument1 pageSprinter CargoVan 417 Mediana - 90764313-MXFManuel SalinasNo ratings yet
- Catálogo Contadores Con Preselección Omron H5CX - H7CXDocument6 pagesCatálogo Contadores Con Preselección Omron H5CX - H7CXAbel SantNo ratings yet
- Nueva SimbologiaDocument7 pagesNueva SimbologiaLuisa Fernanda LopezNo ratings yet
- Determinación de Carbonatos y BicarbonatosDocument4 pagesDeterminación de Carbonatos y BicarbonatosRomario GutierrezNo ratings yet
- Programa Curricular Primaria 3 Grado Iaro Con QuechuaDocument28 pagesPrograma Curricular Primaria 3 Grado Iaro Con QuechuaJorge A. Mejia BernuyNo ratings yet
- 6 7 y 8 GuytonDocument6 pages6 7 y 8 Guytontonolo100% (1)
- Esquema! 2Document7 pagesEsquema! 2Alberto TitoNo ratings yet
- Absorcion AtomicaDocument36 pagesAbsorcion AtomicaKarol ArellanoNo ratings yet
- 6 Implementacion y Evaluacion Administrativa 1 Pe2016 Tri2-17Document2 pages6 Implementacion y Evaluacion Administrativa 1 Pe2016 Tri2-17Armando RivasNo ratings yet
- Desarrollo de La Química Analítica en Función Del TiempoDocument5 pagesDesarrollo de La Química Analítica en Función Del Tiempokaren mestraNo ratings yet
- Metrologia Tarea Semana 5Document4 pagesMetrologia Tarea Semana 5erwin100% (1)
- Caso 1 - Diagrama de ParetoDocument8 pagesCaso 1 - Diagrama de Paretoobjetivo19No ratings yet
- Escaras TDocument122 pagesEscaras ThomecaresaludNo ratings yet
- Planificacion RosarioDocument2 pagesPlanificacion RosarioTere RodríguezNo ratings yet
- Lubricacion Industrial.Document62 pagesLubricacion Industrial.Drosee MatiasNo ratings yet
- Manual de Instrucciones sn210bm - sn270btDocument76 pagesManual de Instrucciones sn210bm - sn270btAlfonso GiménezNo ratings yet
- El Silogismo y El TaoDocument15 pagesEl Silogismo y El TaoDavid RamírezNo ratings yet