You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Universal Basic IncomeDocument32 pagesUniversal Basic IncomeparadoxendazzlingNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- EG2401 Lec 6 14-15sem2 (Compatibility Mode)Document31 pagesEG2401 Lec 6 14-15sem2 (Compatibility Mode)paradoxendazzlingNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- UTS2101 Syllabus AY2015 Sem 1Document7 pagesUTS2101 Syllabus AY2015 Sem 1paradoxendazzlingNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Gaming SocialDocument15 pagesGaming SocialparadoxendazzlingNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Hips (High Impact Polystyrene) : Advantages of HIPS: Applications IncludeDocument1 pageHips (High Impact Polystyrene) : Advantages of HIPS: Applications IncludeparadoxendazzlingNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- ME2135 Lecture Summary 21janDocument4 pagesME2135 Lecture Summary 21janparadoxendazzlingNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- V U Vds Udx Vdy Dxdy Dxdy X Y: Counterclockwise Line IntegralDocument1 pageV U Vds Udx Vdy Dxdy Dxdy X Y: Counterclockwise Line IntegralparadoxendazzlingNo ratings yet
- ME3122 Handbook of Heat Transfer Equations 2014Document22 pagesME3122 Handbook of Heat Transfer Equations 2014howsky31No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
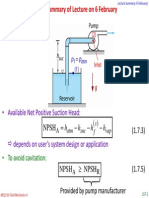
- Cavitation in Pumps: NPSH (1.7.3)Document2 pagesCavitation in Pumps: NPSH (1.7.3)paradoxendazzlingNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
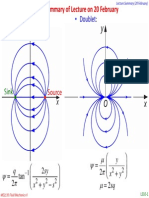
- Source: - DoubletDocument4 pagesSource: - DoubletparadoxendazzlingNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Theory Test 1 NotesDocument6 pagesTheory Test 1 NotesparadoxendazzlingNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- ME2135 QUIZ - February 2010Document6 pagesME2135 QUIZ - February 2010paradoxendazzlingNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Chapter 1 Sept 12Document39 pagesChapter 1 Sept 12paradoxendazzlingNo ratings yet
- Gatsby: Chapter SevenDocument1 pageGatsby: Chapter SevenparadoxendazzlingNo ratings yet
- Impact of World War I Treaty of VersaillesDocument4 pagesImpact of World War I Treaty of VersaillesparadoxendazzlingNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- FI NotesDocument1,069 pagesFI NotesparadoxendazzlingNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- BBFH107Document102 pagesBBFH107lord100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Conduction Convection RadiationDocument23 pagesConduction Convection Radiationsuhaila bakarNo ratings yet
- MTH101 TutorialDocument2 pagesMTH101 TutorialOnochie EnunwaonyeNo ratings yet
- Chapter 09 - FracturePressureDocument55 pagesChapter 09 - FracturePressuredwiokkysaputraNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Padhle Akshay Maths 33 DaysDocument263 pagesPadhle Akshay Maths 33 DaysShamik BhattacharjeeNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Finalaanddsjs 161006045209Document25 pagesFinalaanddsjs 161006045209S.marimuthuNo ratings yet
- PDF Solution Manual For Gas Turbine Theory 6th Edition Saravanamuttoo Rogers CompressDocument7 pagesPDF Solution Manual For Gas Turbine Theory 6th Edition Saravanamuttoo Rogers CompressErickson Brayner MarBer100% (1)
- Swap Sector & Wrong Azimuth - JBDocument19 pagesSwap Sector & Wrong Azimuth - JBPaulus SihombingNo ratings yet
- Multimeter Parts and Functions PDFDocument15 pagesMultimeter Parts and Functions PDFmarkNo ratings yet
- Electromagnetic FlowmeterDocument10 pagesElectromagnetic FlowmeterAjjay KumarNo ratings yet
- Dav Kapildev Public School, Kadru, Ranchi: ( Most Important Questions For Board Exams)Document2 pagesDav Kapildev Public School, Kadru, Ranchi: ( Most Important Questions For Board Exams)MD JahangirNo ratings yet
- Fourier SeriesDocument46 pagesFourier Seriesपल मान्टिNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Unit 6-Fluid MechanicsDocument25 pagesUnit 6-Fluid MechanicsApechRanger100% (4)
- NTE7197 Integrated Circuit High-Performance 68W Audio Power Amplifier /muteDocument4 pagesNTE7197 Integrated Circuit High-Performance 68W Audio Power Amplifier /mutedaneloNo ratings yet
- Universal Informatics: "Python"Document23 pagesUniversal Informatics: "Python"Maanvendra Singh RajputNo ratings yet
- Ray Tracing Algorithms - Theory and Practice: 1 Photographic Realism in Computer GraphicsDocument29 pagesRay Tracing Algorithms - Theory and Practice: 1 Photographic Realism in Computer Graphicschuck212No ratings yet
- P 278 - GN 1007Document25 pagesP 278 - GN 1007Doben DalisayNo ratings yet
- A Mathematical Model For The Spatiotemporal Epidemic Spreading of COVID19Document13 pagesA Mathematical Model For The Spatiotemporal Epidemic Spreading of COVID19Barbara BusanelloNo ratings yet
- P521 OrderForm - V18 - 09 - 2014Document11 pagesP521 OrderForm - V18 - 09 - 2014Pakde NdokNo ratings yet
- Electronics Fundamentals Circuits Devices and ApplicationsDocument194 pagesElectronics Fundamentals Circuits Devices and ApplicationsRenz Justine VillegasNo ratings yet
- TEMA Shell Bundle Entrance and Exit AreasDocument3 pagesTEMA Shell Bundle Entrance and Exit AreasArunkumar MyakalaNo ratings yet
- Oasismontaj TutorialnewDocument297 pagesOasismontaj TutorialnewArmando Cesar Landa FerrelNo ratings yet
- FT8 Hinson Tips For HF DXersDocument80 pagesFT8 Hinson Tips For HF DXersIp CamNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapter 5 Final A5 EditDocument8 pagesChapter 5 Final A5 EditkINGNo ratings yet
- The Angular Firebase Survival Guide 465103162Document110 pagesThe Angular Firebase Survival Guide 465103162Al XxNo ratings yet
- COMPUTER PROGRA-WPS OfficeDocument5 pagesCOMPUTER PROGRA-WPS OfficeGurpreet KumarNo ratings yet
- Aldehydes Ketones and Carboxylic Acids YuvabrigadeDocument4 pagesAldehydes Ketones and Carboxylic Acids YuvabrigadeRavishankar H SNo ratings yet
- Software Development Life Cycle-VDocument3 pagesSoftware Development Life Cycle-VDeepak Prakash JayaNo ratings yet
- CNQ#1 PDFDocument32 pagesCNQ#1 PDFareejaNo ratings yet
- DRIVEN PilesDocument64 pagesDRIVEN PilesAyoNo ratings yet