You might also like
- Introduction - Principle of Operation - Hardware - Software - Graphical User Interface - Mathematical Description - Results - Conclusion - ReferencesDocument15 pagesIntroduction - Principle of Operation - Hardware - Software - Graphical User Interface - Mathematical Description - Results - Conclusion - ReferencesRavi KashyapNo ratings yet
- Controlling 3-Phase AC Induction Motors Using PIC18F4431Document24 pagesControlling 3-Phase AC Induction Motors Using PIC18F4431sanct1No ratings yet
- 5 - Control System TrainerDocument50 pages5 - Control System TrainerGadam Siva Charan DasNo ratings yet
- Speed Control of DC Motor Using Pid ControllerDocument20 pagesSpeed Control of DC Motor Using Pid ControllerBUBUNNo ratings yet
- DC Servo Motor ControlDocument14 pagesDC Servo Motor ControlKundan NamadeNo ratings yet
- BLDC Sinusoidal ControlDocument6 pagesBLDC Sinusoidal ControlOctavian MîrţiNo ratings yet
- Name: Faizan Bashir Reg No: F20604044 Submitted To: Sir Abdul Qadeer Date: 26/2/2023Document16 pagesName: Faizan Bashir Reg No: F20604044 Submitted To: Sir Abdul Qadeer Date: 26/2/2023safiullahadam353No ratings yet
- Automated Aquarium FeederDocument11 pagesAutomated Aquarium FeederMenaka MadusankaNo ratings yet
- Position Control of Hybrid Stepper MotorDocument36 pagesPosition Control of Hybrid Stepper MotorAditya ChaudharyNo ratings yet
- PID Speed Control of DC Motor Using MicrocontrollerDocument7 pagesPID Speed Control of DC Motor Using MicrocontrollerGias NawariNo ratings yet
- 1 Introduction To Real-Time ControlDocument8 pages1 Introduction To Real-Time ControlraghavNo ratings yet
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 pagesHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- A Project ProposalDocument5 pagesA Project ProposalMuhammad Umer FarooqNo ratings yet
- Unit V - Applications (9 Hours)Document37 pagesUnit V - Applications (9 Hours)hang hubsNo ratings yet
- BLDC Motor Speed Control with RPM DisplayDocument19 pagesBLDC Motor Speed Control with RPM Displays.b.v.seshagiri1407No ratings yet
- Speed Control of DC Motor Using Pid Controller BasedDocument16 pagesSpeed Control of DC Motor Using Pid Controller Basedayesha amjadNo ratings yet
- 2688 DERECHODocument4 pages2688 DERECHODiego CatariNo ratings yet
- Econder MicrochipDocument12 pagesEconder MicrochipSandra MarkivNo ratings yet
- Digital Control of Stepper MotorDocument13 pagesDigital Control of Stepper MotorEngr Nayyer Nayyab MalikNo ratings yet
- Stepper Motor Control Using The PIC16F684Document12 pagesStepper Motor Control Using The PIC16F684edward_conzaNo ratings yet
- PID AlgDocument2 pagesPID AlgAheesha J VadaviNo ratings yet
- Dsa 0026528Document2 pagesDsa 002652820824ddNo ratings yet
- Calibration Motion Control System-Part2 PDFDocument6 pagesCalibration Motion Control System-Part2 PDFnurhazwaniNo ratings yet
- Camera Movement Control Using PID Controller in LabVIEWDocument5 pagesCamera Movement Control Using PID Controller in LabVIEWEditor IJTSRDNo ratings yet
- Pick and Place RobotDocument5 pagesPick and Place RobotAkhilesh MaheshwariNo ratings yet
- 4 Quadrant Speed Control of DC Motor Using MicrocontrollerDocument3 pages4 Quadrant Speed Control of DC Motor Using MicrocontrollerAmritanshu RuhelaNo ratings yet
- Speed control of BLDC Motor using IPM and Micro 2812Document41 pagesSpeed control of BLDC Motor using IPM and Micro 2812subbanna100% (1)
- Mini Project 3Document5 pagesMini Project 3shrouksalah925No ratings yet
- DC Motor Speed ControlDocument24 pagesDC Motor Speed ControlSumu Talal50% (2)
- Novel Method PMDC Motor Speed ControlDocument15 pagesNovel Method PMDC Motor Speed ControlTravis WoodNo ratings yet
- Design of PLC Based Speed Control of DC Motor Using PI ControllerDocument4 pagesDesign of PLC Based Speed Control of DC Motor Using PI ControllerTricia Mae EvangelistaNo ratings yet
- CNC-H4-T Numerical Control System for Vertical LatheDocument8 pagesCNC-H4-T Numerical Control System for Vertical LatheRobert GiangNo ratings yet
- Fuzzy PID Controller Improves Speed Control of DC Motor in LabVIEWDocument7 pagesFuzzy PID Controller Improves Speed Control of DC Motor in LabVIEWGunpla GandamuNo ratings yet
- DC Motor Speed Control Part I: Open-Loop CommandDocument5 pagesDC Motor Speed Control Part I: Open-Loop CommandEbd RahmanNo ratings yet
- AnotherDocument51 pagesAnotherRoopam AmborNo ratings yet
- Paper 207578Document13 pagesPaper 207578inty vacaNo ratings yet
- User Manual For Speed Control of BLDC Motor Using DspicDocument12 pagesUser Manual For Speed Control of BLDC Motor Using DspicTrung TrựcNo ratings yet
- Microprocessors and Microcontrollers Lab: Title: ComponentsDocument8 pagesMicroprocessors and Microcontrollers Lab: Title: ComponentsGhulam E Muhammad UsmanNo ratings yet
- Interfacing Servo Motor with PIC MicrocontrollerDocument4 pagesInterfacing Servo Motor with PIC MicrocontrollerSUNIL MP100% (2)
- Calibration Motion Control System-Part2Document7 pagesCalibration Motion Control System-Part2NURUL FATIN HAMIZAH AH SIAK MOHD HELMINo ratings yet
- Electronica - Servo Control of A Dc-Brush Motor An532Document89 pagesElectronica - Servo Control of A Dc-Brush Motor An532Ismael 8877No ratings yet
- Project Report On Robotic ArmDocument28 pagesProject Report On Robotic Armpatel ketan84% (25)
- Dyna DCMC Curriculam ManualDocument203 pagesDyna DCMC Curriculam ManualDevSinghNo ratings yet
- ZigbeebaseddcmotorsremotemonitoringandcontrolDocument21 pagesZigbeebaseddcmotorsremotemonitoringandcontrolSiva RanjaniNo ratings yet
- DC Motor Closed LoopDocument11 pagesDC Motor Closed Looprichard chombaNo ratings yet
- ST2715Document20 pagesST2715mamz4uNo ratings yet
- Position Control of Brushed DC Motor Using Pid Controller in MatlabDocument5 pagesPosition Control of Brushed DC Motor Using Pid Controller in MatlabJournal 4 Research100% (1)
- Microprocessor Based Digital PID Controller For Speed Control of D.C. MotorDocument6 pagesMicroprocessor Based Digital PID Controller For Speed Control of D.C. MotorSwapnica GarreNo ratings yet
- Gas Turbine Frame 6 AVRDocument11 pagesGas Turbine Frame 6 AVRMohamed Kamal0% (1)
- CAT - Resolucion Falla Engine Speed - TestDocument6 pagesCAT - Resolucion Falla Engine Speed - TestSebastian Rodrigo OctavianoNo ratings yet
- Intelligent Stepper Motor Driver With DRV8824Document22 pagesIntelligent Stepper Motor Driver With DRV8824RintheGreatNo ratings yet
- Throttle Position Sensor Circuit PDFDocument13 pagesThrottle Position Sensor Circuit PDFaliNo ratings yet
- IMC Tuned PID Controller Improves DC Motor ControlDocument6 pagesIMC Tuned PID Controller Improves DC Motor ControljayaseelanNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- Model Predictive Control of High Power Converters and Industrial DrivesFrom EverandModel Predictive Control of High Power Converters and Industrial DrivesNo ratings yet
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- Tuberculosis of The Spine Is One of The Oldest Demonstrated Diseases of HumankindDocument32 pagesTuberculosis of The Spine Is One of The Oldest Demonstrated Diseases of HumankindtechcaresystemNo ratings yet
- M.C.B Unit - 7 Section - 2Document2 pagesM.C.B Unit - 7 Section - 2techcaresystemNo ratings yet
- Automatic Led Emergency LightDocument22 pagesAutomatic Led Emergency LightAditya SinghNo ratings yet
- Mini Project Report IimtDocument3 pagesMini Project Report IimttechcaresystemNo ratings yet
- Research Project Report: On "Job Satisfaction"Document11 pagesResearch Project Report: On "Job Satisfaction"techcaresystemNo ratings yet
- 01 05iimt AirlineDocument5 pages01 05iimt AirlinetechcaresystemNo ratings yet
- Critical Analysis On: Rehabilitation of PrisonesDocument45 pagesCritical Analysis On: Rehabilitation of PrisonestechcaresystemNo ratings yet
- Pages From Shivam FinAL 0Document1 pagePages From Shivam FinAL 0techcaresystemNo ratings yet
- PCX - ReportDocument69 pagesPCX - ReporttechcaresystemNo ratings yet
- Chapter 4 DataDocument44 pagesChapter 4 DatatechcaresystemNo ratings yet
- Mobile Shop Management System: Mini Project Report ONDocument3 pagesMobile Shop Management System: Mini Project Report ONtechcaresystemNo ratings yet
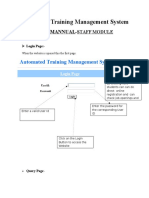
- ATS Project User Module ManualDocument8 pagesATS Project User Module ManualtechcaresystemNo ratings yet
- e-shopPROJECT REPORT-final1Document89 pagese-shopPROJECT REPORT-final1techcaresystemNo ratings yet
- Biomolecules (Chemistry) : Classification of Carbohydrates & Glucose - Preparation and StructureDocument15 pagesBiomolecules (Chemistry) : Classification of Carbohydrates & Glucose - Preparation and StructureLloyd Simon100% (1)
- Examinatoncentrelistforoddsemester2014 15: Centre Code Examination Centre Colleg e Code College Name CousreDocument34 pagesExaminatoncentrelistforoddsemester2014 15: Centre Code Examination Centre Colleg e Code College Name CousretechcaresystemNo ratings yet
- Examinatoncentrelistforoddsemester2014 15: Centre Code Examination Centre Colleg e Code College Name CousreDocument34 pagesExaminatoncentrelistforoddsemester2014 15: Centre Code Examination Centre Colleg e Code College Name CousretechcaresystemNo ratings yet
- Java B-Tech-2014-2015Document8 pagesJava B-Tech-2014-2015techcaresystemNo ratings yet
- Java B-Tech-2014-2015Document8 pagesJava B-Tech-2014-2015techcaresystemNo ratings yet
- Master of Business Administration: Study of Invesment Pattern of Private Employee With Reference To Reliance Money"Document47 pagesMaster of Business Administration: Study of Invesment Pattern of Private Employee With Reference To Reliance Money"techcaresystemNo ratings yet
- Java B-Tech-2014-2015Document8 pagesJava B-Tech-2014-2015techcaresystemNo ratings yet
- Study On HR Process at Bosch India LTD ": Summer Training Project ReportDocument5 pagesStudy On HR Process at Bosch India LTD ": Summer Training Project ReporttechcaresystemNo ratings yet
- All ProjectDocument2 pagesAll ProjecttechcaresystemNo ratings yet
- "Customer Satisfaction at Domino'S Pizza": College of Applied Education & Health SciencesDocument4 pages"Customer Satisfaction at Domino'S Pizza": College of Applied Education & Health SciencestechcaresystemNo ratings yet
- Motivation in BanksDocument98 pagesMotivation in Bankstechcaresystem0% (1)
- Comparative Study of RIM and Other Insurance ProductsDocument4 pagesComparative Study of RIM and Other Insurance ProductstechcaresystemNo ratings yet
- To Study of Marketing of TATA Photon Plus": DeclarationDocument2 pagesTo Study of Marketing of TATA Photon Plus": DeclarationtechcaresystemNo ratings yet
- 2nd Draft - Pulkit AgarwalDocument63 pages2nd Draft - Pulkit AgarwalGuman SinghNo ratings yet
- Maruti Asif AligggDocument74 pagesMaruti Asif AligggGuman SinghNo ratings yet
- "Consumer Satisfaction For Maruti Suzuki Showroom": College of Applied Education & Health SciencesDocument5 pages"Consumer Satisfaction For Maruti Suzuki Showroom": College of Applied Education & Health SciencestechcaresystemNo ratings yet
- Generative Adversarial Networks Review 1-06-08-1.editDocument24 pagesGenerative Adversarial Networks Review 1-06-08-1.editgijare6787No ratings yet
- A-019730-1647417034966-137850-W.M.Supun Anjana SADDocument100 pagesA-019730-1647417034966-137850-W.M.Supun Anjana SADDishan SanjayaNo ratings yet
- An Introduction To Artificial Neural NetworkDocument5 pagesAn Introduction To Artificial Neural NetworkMajin BuuNo ratings yet
- UML - Structural and Behavioral ThingsDocument34 pagesUML - Structural and Behavioral Thingshonalemangesh100% (1)
- Robotic Warehouse Systems, Parcel Sorter, Automated Warehouse RobotsDocument11 pagesRobotic Warehouse Systems, Parcel Sorter, Automated Warehouse RobotsronalddragoNo ratings yet
- 10th Part B-Unit 2 AI Project Cycle-1Document17 pages10th Part B-Unit 2 AI Project Cycle-1anshsoni1101No ratings yet
- Paper Publications Details - EleDocument2 pagesPaper Publications Details - EleNisha OjhaNo ratings yet
- Failure Mode Effects Analysis (Fmea)Document10 pagesFailure Mode Effects Analysis (Fmea)ULHAS KADAM0% (1)
- Selvakumar Perumal: Education SkillsDocument1 pageSelvakumar Perumal: Education SkillsarbimbbNo ratings yet
- JK Sharma - PERT and CPMDocument139 pagesJK Sharma - PERT and CPMRakshitha RNo ratings yet
- Modern Systems Analysis and DesignDocument31 pagesModern Systems Analysis and DesignBhavikDaveNo ratings yet
- Elaborando macros con Solver en LibreOffice Calc para optimización no linealDocument2 pagesElaborando macros con Solver en LibreOffice Calc para optimización no linealJeffersonMorilloNo ratings yet
- Advanced Software Engineering Lecture 04Document39 pagesAdvanced Software Engineering Lecture 04Buddhika GamageNo ratings yet
- 1 10 Optimization PDFDocument20 pages1 10 Optimization PDFDanielNo ratings yet
- Design & Development ProcessDocument3 pagesDesign & Development ProcessganrashNo ratings yet
- Predictive Maintenance With MatlabDocument22 pagesPredictive Maintenance With MatlabwilliamNo ratings yet
- OOAD - Object Oriented Analysis Design OverviewDocument70 pagesOOAD - Object Oriented Analysis Design OverviewUdhaya SankarNo ratings yet
- Testing Methods - SEDocument25 pagesTesting Methods - SEHassam ShahidNo ratings yet
- Lecture 3 (CHP 3) ModelsDocument45 pagesLecture 3 (CHP 3) ModelsRita RanveerNo ratings yet
- Nonverbal CommunicationDocument35 pagesNonverbal CommunicationSofia De Luna100% (3)
- Reliability 2Document8 pagesReliability 2Georgina SuleNo ratings yet
- Pmbok Guide 6: Ed. Process Flow ChartDocument1 pagePmbok Guide 6: Ed. Process Flow ChartHazaratali DakhaniNo ratings yet
- Core Tool (APQP, PPAP, MSA, SPC & Fmea) : Store CoursesDocument3 pagesCore Tool (APQP, PPAP, MSA, SPC & Fmea) : Store CoursesPrasenjit PuriNo ratings yet
- A 4096-Neuron 1M-Synapse 3.8-pJ SOP Spiking Neural Network With On-Chip STDP Learning and Sparse Weights in 10-nm FinFET CMOSDocument11 pagesA 4096-Neuron 1M-Synapse 3.8-pJ SOP Spiking Neural Network With On-Chip STDP Learning and Sparse Weights in 10-nm FinFET CMOSPANTHADIP MAJINo ratings yet
- 4 Control System ComponentsDocument43 pages4 Control System ComponentsJEYAVEL PALANISAMYNo ratings yet
- Job Safety Analysis (Jsa) and Risk Assessment FormDocument2 pagesJob Safety Analysis (Jsa) and Risk Assessment FormHery KurniawanNo ratings yet
- History of Control SystemDocument11 pagesHistory of Control Systemarvinlorenz100% (1)
- Rekap Nilai Uas Genap 20092010Document108 pagesRekap Nilai Uas Genap 20092010Rahmat HidayatullahNo ratings yet
- Professional Diploma in Artificial Intelligence Starter PackDocument8 pagesProfessional Diploma in Artificial Intelligence Starter PackGaming X YTNo ratings yet
- Vu Re Lecture 43Document36 pagesVu Re Lecture 43AlirezaNo ratings yet