You might also like
- Les Machines Synchrones 2019-2020Document81 pagesLes Machines Synchrones 2019-2020sawadogo100% (3)
- Modèle Présentation PFE 2021Document18 pagesModèle Présentation PFE 2021Evox100% (2)
- 50 Romans IncontourablesDocument5 pages50 Romans IncontourablesFarid BouNo ratings yet
- TP2 Onduleur TriphaséDocument10 pagesTP2 Onduleur Triphasédrissi kaitouni zineb100% (1)
- TP AntDocument43 pagesTP Anthubfri100% (1)
- Soutenance PFE CDG DevDocument23 pagesSoutenance PFE CDG DevscabandraNo ratings yet
- Etude de Projet PDF TunisieDocument2 pagesEtude de Projet PDF TunisieJason67% (3)
- Demande Manuscrite Pour Concours de DoctoratDocument1 pageDemande Manuscrite Pour Concours de Doctoratberkane chrifa100% (4)
- Impo Dimensionnement Installation Electrique 2Document80 pagesImpo Dimensionnement Installation Electrique 2Rabia Manar100% (4)
- Attestation de VacationDocument2 pagesAttestation de VacationÉcole 221100% (4)
- Stage de Fin DDocument231 pagesStage de Fin Ddj44100% (1)
- LM Stage-MyCVFactoryDocument1 pageLM Stage-MyCVFactoryLETUDIANT75% (8)
- Rapport de Stage Au Sein de L'agence Du Bassin Hydraulique de SebouDocument20 pagesRapport de Stage Au Sein de L'agence Du Bassin Hydraulique de SebouBrahim GharoudiNo ratings yet
- Lettre de Motivation Pour Un Stage PFEDocument1 pageLettre de Motivation Pour Un Stage PFESliim AmiriNo ratings yet
- Monsieur IbrahimDocument18 pagesMonsieur IbrahimFarid BouNo ratings yet
- Diagramme de MoodyDocument1 pageDiagramme de MoodyHyd BenNo ratings yet
- Mise en Place D'une Communication Digitale Pour Une Entreprise de Télécom: Cas de ARYAMADocument77 pagesMise en Place D'une Communication Digitale Pour Une Entreprise de Télécom: Cas de ARYAMAIssifou OUATTARANo ratings yet
- Demande Manuscrite LPDocument1 pageDemande Manuscrite LPMaximillianBeGassusNo ratings yet
- Coran BibleDocument109 pagesCoran BibleFarid BouNo ratings yet
- Polycopié Benabadji Final PDFDocument71 pagesPolycopié Benabadji Final PDFabdelouahab bouchama100% (1)
- 1 PFE Remerciement Et ConclusionDocument4 pages1 PFE Remerciement Et Conclusionسير ين0% (1)
- Lettre de Motivation Stage Pfe PDFDocument1 pageLettre de Motivation Stage Pfe PDFsaid100% (2)
- Page de Garde Rapport de PfeDocument1 pagePage de Garde Rapport de PfeRabiaa Chihaoui100% (4)
- Demande de Stage RedalDocument1 pageDemande de Stage RedalYoussef EL GHAIDA100% (2)
- Demande de StageDocument1 pageDemande de Stagehoussamlollol50% (2)
- Rapport Projet StatistiqueDocument33 pagesRapport Projet StatistiqueAKHMOUCH Sarah100% (1)
- Fiche de NotationDocument1 pageFiche de NotationNybaly IsmælovićNo ratings yet
- Memoire - M2 - Mamadou COULIBAY - FinaleDocument83 pagesMemoire - M2 - Mamadou COULIBAY - FinaleMamadou CoulibalyNo ratings yet
- Campus France-8 Erreurs À ÉviterDocument3 pagesCampus France-8 Erreurs À ÉviterFranck-Ismael CoulibalyNo ratings yet
- Page de GardeDocument1 pagePage de GardeIMANo ratings yet
- Projet D'étudeDocument2 pagesProjet D'étudefaysal100% (1)
- Demande de Vacation Université NDjamenaDocument1 pageDemande de Vacation Université NDjamenaBelenan Kemtingar100% (1)
- Pfe FinaleDocument78 pagesPfe FinaleYossef ARNo ratings yet
- Rapport de Stage HexabyteDocument18 pagesRapport de Stage HexabyteMsalmi Rim100% (2)
- Lettre de RecommandationDocument2 pagesLettre de RecommandationGuillaume NchupasseNo ratings yet
- Demande de DérogationDocument1 pageDemande de DérogationKamoun100% (5)
- Powerpoint Exemple Soutenance de Memoire 2 1Document10 pagesPowerpoint Exemple Soutenance de Memoire 2 1Youssef Rafiki100% (1)
- CV End EtudiantDocument1 pageCV End EtudiantLouay ZiouaNo ratings yet
- 2 Mémoire Remerciement Introduction ConclusionDocument4 pages2 Mémoire Remerciement Introduction ConclusionBouh moussaNo ratings yet
- Entretien Questions Et Réponses PDFDocument4 pagesEntretien Questions Et Réponses PDFHamza ABBASSINo ratings yet
- CHAPITRE 3 - Les PrecipitationsDocument44 pagesCHAPITRE 3 - Les PrecipitationsNoreddine Ait Oussi100% (1)
- Rapport de Stage FinalDocument37 pagesRapport de Stage FinalElhattab FethiNo ratings yet
- Conseils Compte Rendu TPDocument2 pagesConseils Compte Rendu TPAbdelbasset Biaz100% (3)
- ABH LoukkosDocument28 pagesABH Loukkosmoussa el mansouriNo ratings yet
- Rappel Chapitre 3-4 PERT ProbabilisteDocument28 pagesRappel Chapitre 3-4 PERT ProbabilisteAbdelkhalek Saidi100% (3)
- Lettre de Motivation CIT OrientalDocument1 pageLettre de Motivation CIT OrientalZÄkãrîãêÊlJêmLîNo ratings yet
- Fiche D'appreciationDocument4 pagesFiche D'appreciationHassan HoudoudNo ratings yet
- SOPALDocument2 pagesSOPALguerrerosNo ratings yet
- InnovTech 21Document1 pageInnovTech 21Fatima EzzahraNo ratings yet
- Rapport de Projet de Fin de FormationDocument13 pagesRapport de Projet de Fin de FormationZakaria Jmili100% (2)
- LP MIEUR H2O - PresentationDocument1 pageLP MIEUR H2O - PresentationOthmänë El HimessNo ratings yet
- Lettre de Motivation ManagemDocument1 pageLettre de Motivation Managemhasnaa azziNo ratings yet
- Demande de StageDocument1 pageDemande de StageredNo ratings yet
- Mon Rapport de Stage Pour La SNCEDocument16 pagesMon Rapport de Stage Pour La SNCEMohàméd Jààfàr Arhoùjdam100% (1)
- TP OfdmDocument3 pagesTP Ofdmhassan ABDELMOUNIM0% (2)
- Exercice Optique G1-05 PDFDocument1 pageExercice Optique G1-05 PDFsevemasse0% (1)
- PFE ENS Version Final - Impression PDFDocument75 pagesPFE ENS Version Final - Impression PDFAbdel Hakim M. Nadjib100% (1)
- Mémoire PFEDocument59 pagesMémoire PFEGhâdaAouiniNo ratings yet
- Tp1 VRD EpanetDocument8 pagesTp1 VRD EpanetLoTfi Sassi100% (1)
- L'influence Du Barrage de Draa Diss Sur Les Réserves Hydriques Dans Le Bassin Versant D'el Eulma (NE Algérien)Document172 pagesL'influence Du Barrage de Draa Diss Sur Les Réserves Hydriques Dans Le Bassin Versant D'el Eulma (NE Algérien)Mezerzi Aboutaleb80% (5)
- Examen MethodologieDocument4 pagesExamen MethodologieLeila Karar100% (3)
- Lettre Motivation Ingenieur HydrauliqueDocument1 pageLettre Motivation Ingenieur HydrauliqueAdilGuizza100% (1)
- Demande de Stage OCP PDFDocument1 pageDemande de Stage OCP PDFayoubNo ratings yet
- TP Elt2Document8 pagesTP Elt2Sa RahNo ratings yet
- ATD03 Avec SolutionDocument7 pagesATD03 Avec Solutionbaya eltNo ratings yet
- Ofppt: Office de La Formation Professionnelle Et de La Promotion Du TravailDocument7 pagesOfppt: Office de La Formation Professionnelle Et de La Promotion Du Travailouissal electroNo ratings yet
- Cnc-2009 Si Tsi Ge CorrigeDocument7 pagesCnc-2009 Si Tsi Ge Corrigeali18abidNo ratings yet
- Romans Mag 1 1962Document11 pagesRomans Mag 1 1962Farid BouNo ratings yet
- Rapandoc PDFDocument3 pagesRapandoc PDFFarid BouNo ratings yet
- RomansMag 371 Octobre 2022Document32 pagesRomansMag 371 Octobre 2022Farid BouNo ratings yet
- Parcours Romans WebDocument11 pagesParcours Romans WebFarid BouNo ratings yet
- Pensee IslamiqueDocument16 pagesPensee IslamiqueFarid BouNo ratings yet
- A1429 tIX PDFDocument69 pagesA1429 tIX PDFFarid BouNo ratings yet
- 9wut7-Islam PPTDocument58 pages9wut7-Islam PPTFarid BouNo ratings yet
- Livret Jdi FinalDocument16 pagesLivret Jdi FinalFarid BouNo ratings yet
- ClassesDocument18 pagesClassesFarid BouNo ratings yet
- DotnetDocument16 pagesDotnetFarid Bou100% (1)
- DOTNET Vs JAVADocument38 pagesDOTNET Vs JAVAFarid BouNo ratings yet
- Java Cours 1Document83 pagesJava Cours 1Farid BouNo ratings yet
- Cours N°9-3 - Protection Par Disjonteur DifférentielDocument5 pagesCours N°9-3 - Protection Par Disjonteur DifférentielDame GayeNo ratings yet
- TD1 A3Document1 pageTD1 A3Slimane ZadoudNo ratings yet
- ph2 1RC-coursDocument9 pagesph2 1RC-coursFoudil LaouiciNo ratings yet
- DNB Blanc 2 Wolf 2017Document3 pagesDNB Blanc 2 Wolf 2017aticiNo ratings yet
- Memoire de Master Recherches/DEA en Sciences de l'ingénieur/UFD-PSI Université de Douala/CamerounDocument101 pagesMemoire de Master Recherches/DEA en Sciences de l'ingénieur/UFD-PSI Université de Douala/CamerounNGOUNE0% (1)
- L'électrotechnique Notion de Base Et Réseau Électrique PDFDocument53 pagesL'électrotechnique Notion de Base Et Réseau Électrique PDFfekielyes100% (5)
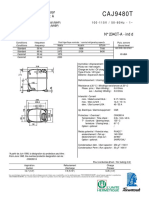
- Caj9480t - Fiche TechniqueDocument2 pagesCaj9480t - Fiche TechniqueA BNo ratings yet
- Devoir de Contrôle N°1 - Sciences Physiques - Bac Sciences Exp (2013-2014) MR Alibi Anouar (1) - DecryptedDocument5 pagesDevoir de Contrôle N°1 - Sciences Physiques - Bac Sciences Exp (2013-2014) MR Alibi Anouar (1) - DecryptedchihebNo ratings yet
- Machine À Courant ContinuDocument6 pagesMachine À Courant ContinuAli_Ghom_9843100% (1)
- 2004 Asie Sujet Etude Bobine 6ptsDocument4 pages2004 Asie Sujet Etude Bobine 6ptsKwiikaa NoNo ratings yet
- MultiSolar - datasheet-FR (1) (1) 2 PDFDocument2 pagesMultiSolar - datasheet-FR (1) (1) 2 PDFFrance MagreNo ratings yet
- I-Introduction:: II-1 - Définitions D'un Réseau ÉlectriqueDocument9 pagesI-Introduction:: II-1 - Définitions D'un Réseau ÉlectriqueDounia PnlaNo ratings yet
- Le Couplage Inductif ch1,2Document7 pagesLe Couplage Inductif ch1,2Oussama LamhiliNo ratings yet
- T Rev 2transfosreponsesDocument3 pagesT Rev 2transfosreponsesLine Hustling DollarNo ratings yet
- Changeur de Prises - WikipédiaDocument16 pagesChangeur de Prises - WikipédiaMohammed BouzianeNo ratings yet
- ExercicesRésolus InstrumentationDocument83 pagesExercicesRésolus Instrumentationmalika elorfNo ratings yet
- Analyse de Circuits A Courant Alternatif PDFDocument132 pagesAnalyse de Circuits A Courant Alternatif PDFazizNo ratings yet
- RL CoursDocument9 pagesRL Coursالغزيزال الحسن EL GHZIZAL HassaneNo ratings yet
- Guides D'ondeDocument17 pagesGuides D'ondeelhoucineNo ratings yet