You might also like
- 2130 WP Peakvue PDFDocument19 pages2130 WP Peakvue PDFedwinsazzz100% (1)
- GET-20061 869 Broken Rotor Bar Application NoteDocument9 pagesGET-20061 869 Broken Rotor Bar Application NoteMeghavahinaNo ratings yet
- WPL 26 Shock MonitoringDocument16 pagesWPL 26 Shock MonitoringAhmed El-ShafeiNo ratings yet
- High Frequency VADocument20 pagesHigh Frequency VAM.TayyabNo ratings yet
- 2130 WP Highfrequency PDFDocument22 pages2130 WP Highfrequency PDFedwinsazzz100% (1)
- Bently Case Study-1Document16 pagesBently Case Study-1selvam998254No ratings yet
- Impact Hammer PDFDocument4 pagesImpact Hammer PDFTheerayootNo ratings yet
- Introduction To Impulse HammersDocument3 pagesIntroduction To Impulse HammersxxNo ratings yet
- Two Channel Plot Setup: 8-16 Advanced Analyze FunctionsDocument13 pagesTwo Channel Plot Setup: 8-16 Advanced Analyze FunctionsrfhunterNo ratings yet
- Csi 2130 WP Triaxal AccelerometerDocument13 pagesCsi 2130 WP Triaxal AccelerometerOrlando MarucaNo ratings yet
- Flir T1K: HD Thermal Imaging CameraDocument2 pagesFlir T1K: HD Thermal Imaging CameraFloreaNo ratings yet
- Using PeakVue Plus Technology For Detecting Anti Friction Bearing FaultsDocument11 pagesUsing PeakVue Plus Technology For Detecting Anti Friction Bearing Faultseko bagus sunaryo100% (1)
- Camaras Flir 2018 - 1020Document128 pagesCamaras Flir 2018 - 1020Victor Polanco GonzalezNo ratings yet
- High Frequency Vibration AnalysisDocument22 pagesHigh Frequency Vibration AnalysisMohamed BelallNo ratings yet
- UltrasonicsDocument26 pagesUltrasonicsRebecca RileyNo ratings yet
- Choosing The Right Accelerometer White Paper PDFDocument6 pagesChoosing The Right Accelerometer White Paper PDFRahulNo ratings yet
- Vibration Monitoring of Paper Mill MachineryDocument17 pagesVibration Monitoring of Paper Mill Machineryerick giovanniNo ratings yet
- Alignment GuideDocument180 pagesAlignment GuideKSMNo ratings yet
- Advanced Vibration Chapter03Document130 pagesAdvanced Vibration Chapter03Alooy MohamedNo ratings yet
- Vibration Case StudiesDocument79 pagesVibration Case StudiesDefinal Chaniago100% (2)
- OrbitDocument12 pagesOrbitThair El-KabbaryNo ratings yet
- Rev.0 CSI 2600 PDFDocument170 pagesRev.0 CSI 2600 PDFAnonymous srwHCpANo ratings yet
- WB - Bearings - Poster - FINAL - US SizeDocument1 pageWB - Bearings - Poster - FINAL - US SizeAditya Shiva AppallaNo ratings yet
- TN 13 Omnitrend ShortcutsDocument2 pagesTN 13 Omnitrend ShortcutsBrtonNo ratings yet
- Emerson Process Management - CSI - PHASE MEASUREMENTS-Fundamental Uses For Single and Cross Channel PhaseDocument11 pagesEmerson Process Management - CSI - PHASE MEASUREMENTS-Fundamental Uses For Single and Cross Channel PhaseiesajitoNo ratings yet
- Vibra K Cmva 2006 Spike Energy Paper 430kb PDFDocument22 pagesVibra K Cmva 2006 Spike Energy Paper 430kb PDFmarvin17No ratings yet
- Accelerometer Selection Based On ApplicationsDocument8 pagesAccelerometer Selection Based On Applicationspatilrushal824No ratings yet
- Jordan University of Science &technology Mechanical Engineering DepartmentDocument8 pagesJordan University of Science &technology Mechanical Engineering Departmentبشير النعيمNo ratings yet
- 2 - Slow Speed Vibration Signal AnalysisDocument9 pages2 - Slow Speed Vibration Signal AnalysisSasi NimmakayalaNo ratings yet
- How Sensor Mounting Affects Measurments: Written by David A. CorelliDocument11 pagesHow Sensor Mounting Affects Measurments: Written by David A. CorelliGilbertoAndresDuarteNo ratings yet
- FLIRDocument19 pagesFLIRArnab SaharoyNo ratings yet
- FFT Windowing TutorialDocument10 pagesFFT Windowing TutorialPradeep LoboNo ratings yet
- Vibration SwitchesDocument12 pagesVibration SwitchesAnonymous 1dVLJSVhtrNo ratings yet
- BN Vbonline Pro Configuration GuideDocument15 pagesBN Vbonline Pro Configuration Guidebiotech666No ratings yet
- VbOnline Reference Guide 24march11Document186 pagesVbOnline Reference Guide 24march11Hamdi MohamedNo ratings yet
- Full SpectraDocument19 pagesFull SpectraBharath Chandra ReddyNo ratings yet
- Istec Bookazine Vibration WebDocument77 pagesIstec Bookazine Vibration WebJarot PrakosoNo ratings yet
- System-1-Evo-Datasheet - RRDocument13 pagesSystem-1-Evo-Datasheet - RRNoetNo ratings yet
- 9, Frequency Response 2 Bode Plot PDFDocument29 pages9, Frequency Response 2 Bode Plot PDFwasif karimNo ratings yet
- Vibration SeverityDocument11 pagesVibration SeverityDr. R. SharmaNo ratings yet
- PCB Thermal Simulation - The State of The Art: Alexandra Francois-Saint-CyrDocument35 pagesPCB Thermal Simulation - The State of The Art: Alexandra Francois-Saint-Cyrkwangjin1980100% (1)
- Forced Vibration AnalysisDocument3 pagesForced Vibration AnalysisJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Paper Oil Analysis in Machine Diagnostic PDFDocument80 pagesPaper Oil Analysis in Machine Diagnostic PDFj.mabukaNo ratings yet
- Introduction To FFTDocument58 pagesIntroduction To FFTTuw Tze KhaiNo ratings yet
- Analysis of Fan Excessive Vibration Using Operating Deflection Shape AnalysisDocument11 pagesAnalysis of Fan Excessive Vibration Using Operating Deflection Shape Analysisbudi_kamilNo ratings yet
- TN 7 VibxpertDocument1 pageTN 7 VibxpertBahtiar YudhistiraNo ratings yet
- Temperature Effects On DC Motor Performance 1Document10 pagesTemperature Effects On DC Motor Performance 1BabuNo ratings yet
- Vibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SDocument14 pagesVibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SSathish KumarNo ratings yet
- AN011 Basics of Structural Testing Analysis PDFDocument16 pagesAN011 Basics of Structural Testing Analysis PDFdejavu_45No ratings yet
- Bently NevadaDocument2 pagesBently Nevadakalam2k2No ratings yet
- Understanding FFTs and WindowingDocument15 pagesUnderstanding FFTs and WindowingSamruddha ThakurNo ratings yet
- Advanced Vibration Exam MCQ 2Document4 pagesAdvanced Vibration Exam MCQ 2ayushNo ratings yet
- DWDM Unit-5Document52 pagesDWDM Unit-5Arun kumar SomaNo ratings yet
- Modeling Material Damping Properties in AnsysDocument16 pagesModeling Material Damping Properties in AnsysNono_geotec100% (1)
- Vibration Analysis of Discrete One and Two Degree of Freedom SystemsDocument11 pagesVibration Analysis of Discrete One and Two Degree of Freedom SystemsNaveen FootyNo ratings yet
- Material Damping PropertiesDocument16 pagesMaterial Damping Propertiessamiran237No ratings yet
- Random VibrationsDocument20 pagesRandom VibrationsVivek PandeyNo ratings yet
- Two Lecture VibrationDocument12 pagesTwo Lecture VibrationUjjawal GuptaNo ratings yet
- ACFrOgDvGtCKXg FgH7kBSOJkzhgwzdfwrMqAlVITixAzWDxtz3nYggpK79H6v5bU2jDm-C8JFLho4i6kS6HQhAXi0wtJ2hnUdBBEzE8U5lo Y2Q6x2R7COHjEX1ePjcguO5EwCKd YcBhlowUpSDocument8 pagesACFrOgDvGtCKXg FgH7kBSOJkzhgwzdfwrMqAlVITixAzWDxtz3nYggpK79H6v5bU2jDm-C8JFLho4i6kS6HQhAXi0wtJ2hnUdBBEzE8U5lo Y2Q6x2R7COHjEX1ePjcguO5EwCKd YcBhlowUpS05ITB Nishant PandeyNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Solar Energy ApplicationDocument9 pagesSolar Energy ApplicationatulsemiloNo ratings yet
- 1 NcesDocument2 pages1 NcesatulsemiloNo ratings yet
- Auto 5sem ATEDocument97 pagesAuto 5sem ATEatulsemiloNo ratings yet
- Compensating Devices of CarbutetorDocument8 pagesCompensating Devices of Carbutetoratulsemilo0% (1)
- Gears Their Designs & Uses: Andrei Lozzi 2012Document23 pagesGears Their Designs & Uses: Andrei Lozzi 2012atulsemiloNo ratings yet
- Terrestrial Heat - : Energy From The Inside of The EarthDocument20 pagesTerrestrial Heat - : Energy From The Inside of The EarthatulsemiloNo ratings yet
- Fuel EnergizerDocument29 pagesFuel EnergizeratulsemiloNo ratings yet
- Vehicle Body Engineering: G.Vijay Bhaskar Asst - Prof Automobile Enginineering DeptDocument75 pagesVehicle Body Engineering: G.Vijay Bhaskar Asst - Prof Automobile Enginineering DeptatulsemiloNo ratings yet
- Topic: Compressor: Tutorial 2Document1 pageTopic: Compressor: Tutorial 2atulsemiloNo ratings yet
- Exercise CompDocument6 pagesExercise CompatulsemiloNo ratings yet
- Tyre TreadsDocument35 pagesTyre TreadsatulsemiloNo ratings yet
- Eco-Design X TransportationDocument35 pagesEco-Design X TransportationatulsemiloNo ratings yet
- Distributor Less SystemDocument13 pagesDistributor Less SystematulsemiloNo ratings yet
- High Performance Power PlantsDocument93 pagesHigh Performance Power PlantsatulsemiloNo ratings yet
- Knock Sensor CombinedDocument15 pagesKnock Sensor Combinedatulsemilo100% (1)
- Brakes FFDocument27 pagesBrakes FFatulsemiloNo ratings yet
- Steering System of VehicleDocument37 pagesSteering System of Vehicleatulsemilo50% (2)
- BOW Guru Antra Goal: Anand PrakashDocument10 pagesBOW Guru Antra Goal: Anand PrakashThe Innocent TuberNo ratings yet
- Me2404 Set1Document16 pagesMe2404 Set1sakthivelsvsNo ratings yet
- Expt 7 Shock Absorber Test RigDocument5 pagesExpt 7 Shock Absorber Test RigRithwik pawarNo ratings yet
- To Determine Central Deflection of Simply Supported Beam by A Concentrated Load at The MidDocument4 pagesTo Determine Central Deflection of Simply Supported Beam by A Concentrated Load at The MidzainNo ratings yet
- FlocculationDocument54 pagesFlocculationSudhir JadhavNo ratings yet
- 2.5.2 L C - D C: Fracture Mechanics: Fundamentals and ApplicationsDocument1 page2.5.2 L C - D C: Fracture Mechanics: Fundamentals and Applicationsahmed fayedNo ratings yet
- Motion in One DimensionDocument12 pagesMotion in One DimensionShinji50% (2)
- SDCDSCDocument9 pagesSDCDSCAnish NeupaneNo ratings yet
- Lecture 2 - Chap 1Document15 pagesLecture 2 - Chap 1Muneer AhmedNo ratings yet
- Pipe Fea Using AnsysDocument14 pagesPipe Fea Using AnsysTONNo ratings yet
- MomentumDocument13 pagesMomentumAlyssa Marie L. PalamianoNo ratings yet
- NCERT Grade 11 Physics CH 04 Motion in Two DimensionsDocument22 pagesNCERT Grade 11 Physics CH 04 Motion in Two DimensionsVenu Chowdary SandhireddyNo ratings yet
- Technical Engineering College Baghdad: Bending TestDocument8 pagesTechnical Engineering College Baghdad: Bending TestDhurghAm M AlmosaoyNo ratings yet
- Final Exam Engineering MechanicsDocument9 pagesFinal Exam Engineering MechanicsjohnjabarajNo ratings yet
- Sol Assign 7Document6 pagesSol Assign 7John Ray CuevasNo ratings yet
- WME01 01 Que 20220111Document28 pagesWME01 01 Que 20220111Dulvan VitharanaNo ratings yet
- Solutions Manual: Heat ExchangersDocument125 pagesSolutions Manual: Heat ExchangersRafael Rivera DelgadoNo ratings yet
- Pretensioned Beam DesignDocument129 pagesPretensioned Beam Designlakshmi1011No ratings yet
- Cooling Tower. Kari Alane Aalto University ExampleDocument53 pagesCooling Tower. Kari Alane Aalto University ExampleTech ManagerNo ratings yet
- Upheavel Buckling CalculationDocument8 pagesUpheavel Buckling Calculationsaravanakkumar boominahtanNo ratings yet
- PE 100 and PP Material Properties Sheet PDFDocument2 pagesPE 100 and PP Material Properties Sheet PDFQuisperolandoNo ratings yet
- Further Kinematics MSDocument7 pagesFurther Kinematics MShello helloNo ratings yet
- Failure Analysis of An Overhead Travelin PDFDocument11 pagesFailure Analysis of An Overhead Travelin PDFRadit and bambangNo ratings yet
- A Computer Program For Designing Interplanetary Injection Trajectories (Fortran)Document22 pagesA Computer Program For Designing Interplanetary Injection Trajectories (Fortran)Anonymous REw1YIq4q7No ratings yet
- Strength of Materials, Structural Design & DrawingsDocument24 pagesStrength of Materials, Structural Design & Drawingsamitkap00rNo ratings yet
- Parking SHEV CalcDocument2 pagesParking SHEV CalcDušan VasićNo ratings yet
- 3-Shear Provisions SlidesDocument15 pages3-Shear Provisions SlidesEngr Aizaz AhmadNo ratings yet
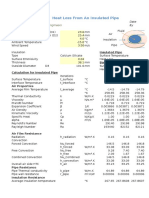
- Heat Loss Insulated PipeDocument32 pagesHeat Loss Insulated PipeDougMooreNo ratings yet
- Fea QBDocument11 pagesFea QBPradeepNo ratings yet
- Broek - The Practical Use of Fracture Mechanics PDFDocument266 pagesBroek - The Practical Use of Fracture Mechanics PDFIan Kelly100% (1)