You might also like
- Dynamometer: Theory and Application to Engine TestingFrom EverandDynamometer: Theory and Application to Engine TestingNo ratings yet
- Electrical Motor Products: International Energy-Efficiency Standards and Testing MethodsFrom EverandElectrical Motor Products: International Energy-Efficiency Standards and Testing MethodsNo ratings yet
- Activity 1.2.6 Maximizing Motor Power - VEXDocument13 pagesActivity 1.2.6 Maximizing Motor Power - VEXcaleb zimmermanNo ratings yet
- Gearhead Selection-Application GuidelinesDocument2 pagesGearhead Selection-Application GuidelinesKarim FawziNo ratings yet
- HugoBrogueira ExtendedAbstract PDFDocument10 pagesHugoBrogueira ExtendedAbstract PDFs2858No ratings yet
- DrivesDocument31 pagesDrivesNithin SebastianNo ratings yet
- Abstract:: Key Word: Induction Motor, EfficiencyDocument6 pagesAbstract:: Key Word: Induction Motor, Efficiencysrinivasan_smartNo ratings yet
- Braking and Regenerative Energy With AC Drives: Application SolutionDocument5 pagesBraking and Regenerative Energy With AC Drives: Application Solutionriver101No ratings yet
- CalculationDocument14 pagesCalculationLipika KanojiaNo ratings yet
- Speed Breaker Power GenerationDocument21 pagesSpeed Breaker Power GenerationmukundNo ratings yet
- Ecce2012 2 RaleighDocument8 pagesEcce2012 2 RaleighGeorge CălinNo ratings yet
- Motor EfficiencyDocument28 pagesMotor EfficiencyMani KandanNo ratings yet
- Solid State Drives & StartersDocument18 pagesSolid State Drives & StartersFlo MircaNo ratings yet
- Feasibility Report On SegwayDocument17 pagesFeasibility Report On SegwayDikshesh PuriNo ratings yet
- Presentation On Industrial AutomationDocument42 pagesPresentation On Industrial AutomationIti AgarwalNo ratings yet
- Permanent Magnet Motors GB 05-2004Document72 pagesPermanent Magnet Motors GB 05-2004David Lopez Rebollo100% (1)
- Solved Problems in Electric MotorsDocument6 pagesSolved Problems in Electric Motorssumithra93% (15)
- DC Motors InformationDocument9 pagesDC Motors InformationCarlosNo ratings yet
- Fadriquel 2208 Laboratory Report 2Document7 pagesFadriquel 2208 Laboratory Report 2Kent Orriele FadriquelNo ratings yet
- Performance Analysis of Three Phase Full Bridge Converter Controlled DC MotorDocument45 pagesPerformance Analysis of Three Phase Full Bridge Converter Controlled DC Motoranon_451051243No ratings yet
- Ed About Brushless MotorsDocument7 pagesEd About Brushless MotorsAddo AdhiyaksaNo ratings yet
- +diesel Electric Propulsion Plants Engineering GuidelineDocument27 pages+diesel Electric Propulsion Plants Engineering GuidelinelesmosNo ratings yet
- Lab Rep 2qweqretetDocument7 pagesLab Rep 2qweqretetKent Orriele FadriquelNo ratings yet
- Traction Motor DesignDocument11 pagesTraction Motor DesignS.m. FerdousNo ratings yet
- An Accurate Method To Determine Electric Motor Efficiency While The Motor Is in OperationDocument28 pagesAn Accurate Method To Determine Electric Motor Efficiency While The Motor Is in OperationShri KulkarniNo ratings yet
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDocument9 pagesDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegNo ratings yet
- "Automatic Sliding Gate": Prajakta Desai, Iptesam Aga, Arti Patil, Jeba WathareDocument6 pages"Automatic Sliding Gate": Prajakta Desai, Iptesam Aga, Arti Patil, Jeba WathareDeepika AndraNo ratings yet
- Integrated Starter-Alternator SystemDocument7 pagesIntegrated Starter-Alternator Systempixelo09No ratings yet
- Schneider IIEE 2013Document66 pagesSchneider IIEE 2013Dave CamposNo ratings yet
- Power Generation Using Speed BreakerDocument32 pagesPower Generation Using Speed BreakerChetan Tiwary0% (1)
- Energy Production From Speed BreakerDocument44 pagesEnergy Production From Speed BreakerMuhammad Bilal67% (3)
- 390 MotorDocument14 pages390 MotorAlex MoiseNo ratings yet
- 3.2 Design SystemDocument48 pages3.2 Design SystemMahmoud RababahNo ratings yet
- DC or AC DrivesDocument12 pagesDC or AC DrivesNeelima MishraNo ratings yet
- E - BikeDocument17 pagesE - BikeSaurabh DeshmukhNo ratings yet
- 2022-2023 ED - Lecture - 1 - Part - 2Document45 pages2022-2023 ED - Lecture - 1 - Part - 2Mats VersmissenNo ratings yet
- Me 2209 Electrical Engineering Lab ManualDocument45 pagesMe 2209 Electrical Engineering Lab ManualSai Karthi100% (1)
- Shimpo Circulute 3000 CatalogDocument36 pagesShimpo Circulute 3000 CatalogElectromateNo ratings yet
- Motors: Ratings and SpecificationsDocument8 pagesMotors: Ratings and SpecificationsSoumen BanerjeeNo ratings yet
- JGB37-550-Geared Motor PDFDocument12 pagesJGB37-550-Geared Motor PDFNguyễn Tấn KhiêmNo ratings yet
- FinalYearProject-DC Motor Speed Control PIC16F877ADocument57 pagesFinalYearProject-DC Motor Speed Control PIC16F877ACata83% (6)
- Motor CalculationsDocument8 pagesMotor CalculationssmhbNo ratings yet
- Choosing A Motor and Gearing CombinationDocument4 pagesChoosing A Motor and Gearing CombinationqeddyNo ratings yet
- DC Motor CalculationsDocument10 pagesDC Motor Calculationsoctav12No ratings yet
- MAGNA START - New Generation Slip-Ring Motor Starter: December 5, 2015Document7 pagesMAGNA START - New Generation Slip-Ring Motor Starter: December 5, 2015udhayNo ratings yet
- Kan ChanDocument21 pagesKan ChanAnonymous NGXdt2BxNo ratings yet
- Electric MotorsDocument66 pagesElectric MotorsAerwin Bautista100% (1)
- Motor Driver Selection For CompressorsDocument13 pagesMotor Driver Selection For CompressorsMuhammad ImranNo ratings yet
- 3 CH 9Document16 pages3 CH 9Pradeep Srivastava SrivastavaNo ratings yet
- Coreless Motor 720Document15 pagesCoreless Motor 720anikmandal106No ratings yet
- Kaizen - Motor Selection GuideDocument11 pagesKaizen - Motor Selection GuideAmory Sabri AsmaroNo ratings yet
- Handson Technology: 775 Ball Bearing DC MotorDocument13 pagesHandson Technology: 775 Ball Bearing DC MotorArif KusumaNo ratings yet
- Handson Technology: 775 Ball Bearing DC MotorDocument13 pagesHandson Technology: 775 Ball Bearing DC Motoranonymous anonymousNo ratings yet
- Handson Technology: 775 Ball Bearing DC MotorDocument13 pagesHandson Technology: 775 Ball Bearing DC Motorkaderdina abdullaNo ratings yet
- Energy Savings of Variable Frequency DrivesDocument31 pagesEnergy Savings of Variable Frequency DrivesAnand AgrawalNo ratings yet
- Electric Motors and Drives: Fundamentals, Types and ApplicationsFrom EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsRating: 4.5 out of 5 stars4.5/5 (12)
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- EGB272 Assignment SpreadsheetDocument7 pagesEGB272 Assignment SpreadsheetWinston BoonNo ratings yet
- WK7Document82 pagesWK7Winston BoonNo ratings yet
- EGB373 Summary PermeabilityDocument1 pageEGB373 Summary PermeabilityWinston BoonNo ratings yet
- Forms Included in This Shipment: A Print Out of This Form Must Accompany Your Physical Returns (In Box 1)Document2 pagesForms Included in This Shipment: A Print Out of This Form Must Accompany Your Physical Returns (In Box 1)Winston BoonNo ratings yet
- A Print Out of This Form Must Accompany Your Physical Returns (In Box 1)Document5 pagesA Print Out of This Form Must Accompany Your Physical Returns (In Box 1)Winston BoonNo ratings yet
- Lecture4 Blank NotesDocument14 pagesLecture4 Blank NotesWinston BoonNo ratings yet
- Assignment-1 Problem 2 ShellDocument1 pageAssignment-1 Problem 2 ShellWinston BoonNo ratings yet
- EGB100 Engineering Sustainability and Professional Practice Lecture Plan 17/02/15Document1 pageEGB100 Engineering Sustainability and Professional Practice Lecture Plan 17/02/15Winston BoonNo ratings yet
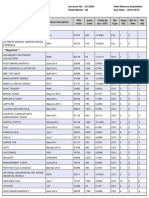
- Account Name: Newstead News Account No: 7313295 Web Returns Submitted Returns Form No: 6061066 Week/Month: 26 Due Date: 1/07/2015Document2 pagesAccount Name: Newstead News Account No: 7313295 Web Returns Submitted Returns Form No: 6061066 Week/Month: 26 Due Date: 1/07/2015Winston BoonNo ratings yet
- Week 2: In-Class Assessment On Teamwork (Group Work, Individual Assessment)Document1 pageWeek 2: In-Class Assessment On Teamwork (Group Work, Individual Assessment)Winston BoonNo ratings yet
- Interference (Workshop 10) Winston Boon - ID: n9450947 Q (1a) Confidence IntervalDocument2 pagesInterference (Workshop 10) Winston Boon - ID: n9450947 Q (1a) Confidence IntervalWinston BoonNo ratings yet
- CRA Week 2Document2 pagesCRA Week 2Winston BoonNo ratings yet
- EGB100 Week 1Document18 pagesEGB100 Week 1Winston BoonNo ratings yet
- Marketing Notes (YAD Meeting)Document1 pageMarketing Notes (YAD Meeting)Winston BoonNo ratings yet
- Account Name: Newstead News Account No: 7313295 Web Returns Submitted Returns Form No: 1781312 Week/Month: 24 Due Date: 18/06/2014Document2 pagesAccount Name: Newstead News Account No: 7313295 Web Returns Submitted Returns Form No: 1781312 Week/Month: 24 Due Date: 18/06/2014Winston BoonNo ratings yet
- When Do I Need in Text Referencing?: Is Not RequiredDocument1 pageWhen Do I Need in Text Referencing?: Is Not RequiredWinston BoonNo ratings yet
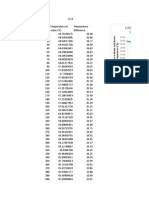
- Newton's Law of Cooling Math Assignment Winston BoonDocument27 pagesNewton's Law of Cooling Math Assignment Winston BoonWinston BoonNo ratings yet
- 12cdiagtest17complex de MDocument1 page12cdiagtest17complex de MWinston BoonNo ratings yet
- Experiment 3 - Observing A Chemical ReactionDocument5 pagesExperiment 3 - Observing A Chemical ReactionWinston Boon100% (1)
- Print Posters - Officeworks - Ask For A3 PrintDocument1 pagePrint Posters - Officeworks - Ask For A3 PrintWinston BoonNo ratings yet
- Frankenstein Research ActivityDocument5 pagesFrankenstein Research ActivityWinston BoonNo ratings yet
- Account Name: Newstead News Account No: 7313295 Web Returns Submitted Returns Form No: 2099690 Week/Month: 28 Due Date: 16/07/2014Document2 pagesAccount Name: Newstead News Account No: 7313295 Web Returns Submitted Returns Form No: 2099690 Week/Month: 28 Due Date: 16/07/2014Winston BoonNo ratings yet
- Ethical Issues: Ian Chen, James Jessop, Shanice Leung, Tiffany Morris, Winston Boon Group 3Document6 pagesEthical Issues: Ian Chen, James Jessop, Shanice Leung, Tiffany Morris, Winston Boon Group 3Winston BoonNo ratings yet
- Academic License InstructionsDocument1 pageAcademic License InstructionsWinston BoonNo ratings yet
- Kinematic Analysis of 3-Position Mechanisms For Use in Hybrid Kinematic MachinesDocument9 pagesKinematic Analysis of 3-Position Mechanisms For Use in Hybrid Kinematic MachinesEdwin AguilarNo ratings yet
- Development of Automatic Chicken Feeder Using Arduino UnoDocument5 pagesDevelopment of Automatic Chicken Feeder Using Arduino UnoBrayan MazónNo ratings yet
- Powered ExoskeletonDocument22 pagesPowered ExoskeletonSarfaras Ali K100% (1)
- Maintenance Group AssignmentDocument20 pagesMaintenance Group Assignmentdawit gashuNo ratings yet
- Automatic Stamping MachineDocument3 pagesAutomatic Stamping MachineInternational Journal of Innovative Science and Research Technology100% (1)
- Caterpillar Cat 247B3 MULTI TERRAIN LOADER (Prefix KB3) Service Repair Manual (KB300001 and Up)Document24 pagesCaterpillar Cat 247B3 MULTI TERRAIN LOADER (Prefix KB3) Service Repair Manual (KB300001 and Up)rpoy9396615No ratings yet
- Machine Design Project PPT - NewDocument43 pagesMachine Design Project PPT - NewAdugna GosaNo ratings yet
- Power Transmission Engineering and Fluid PowerDocument108 pagesPower Transmission Engineering and Fluid PowerHitesh DakharaNo ratings yet
- MONORAIL and AMS Product Catalogue ENDocument211 pagesMONORAIL and AMS Product Catalogue ENCicero MelloNo ratings yet
- Toothed CouplingsDocument47 pagesToothed CouplingsROUSSMATNo ratings yet
- W8 Technology HumanityDocument38 pagesW8 Technology HumanityJerald BacacaoNo ratings yet
- Ccr100 Manual UsuarioDocument224 pagesCcr100 Manual UsuarioAndres RiveraNo ratings yet
- Aesthetics of Interactive Arts SyllabusDocument5 pagesAesthetics of Interactive Arts SyllabusVeraNo ratings yet
- Omm PC200-7Document310 pagesOmm PC200-7Budi Waskito89% (9)
- E70 PDFDocument900 pagesE70 PDFАлексей100% (1)
- BMN Automation 2023 enDocument40 pagesBMN Automation 2023 enВладимирNo ratings yet
- Product Realization Practice Manual Updated PDFDocument22 pagesProduct Realization Practice Manual Updated PDFYerriboina Vishnu VardhanNo ratings yet
- Design and Manufacture of A 30-Ton Hydraulic Press: February 2011Document6 pagesDesign and Manufacture of A 30-Ton Hydraulic Press: February 2011MaheshNo ratings yet
- Magnapunch Parts PunchDocument18 pagesMagnapunch Parts PunchAlex GonzalezNo ratings yet
- Electromechanical EngDocument18 pagesElectromechanical EngAnonymous gsu1cFNo ratings yet
- 6 - Control in Machine ToolsDocument26 pages6 - Control in Machine ToolsMD Al-AminNo ratings yet
- Grant Kadokura Resume 2017 For BlogDocument2 pagesGrant Kadokura Resume 2017 For Blogapi-359520902No ratings yet
- Mini Drill Press MachineDocument13 pagesMini Drill Press MachineTabish Samar100% (5)
- RPS Spare CatalogDocument25 pagesRPS Spare Catalogसुरेश चंद Suresh ChandNo ratings yet
- Agri ProcessDocument63 pagesAgri ProcessAlfredo Jr FortuNo ratings yet
- Planar Mechanisms 1Document6 pagesPlanar Mechanisms 1Aryan Rai0% (1)
- Mechanical Power PressDocument157 pagesMechanical Power PressthaivinhtuyNo ratings yet
- 2042 Mid Term Exam AerodynamicsDocument16 pages2042 Mid Term Exam AerodynamicsHarsh KumarNo ratings yet
- Muyang SLHSJ Series Mixer: Operation ManualDocument67 pagesMuyang SLHSJ Series Mixer: Operation ManualLuis Felipe Saavedra ArangoNo ratings yet
- Application Center: Individual System SolutionsDocument2 pagesApplication Center: Individual System Solutionsdal2507No ratings yet