You might also like
- Solar Car - The ReportDocument39 pagesSolar Car - The Reportinvictus_khan50% (4)
- Solar Car Seminar ReportDocument30 pagesSolar Car Seminar ReportAamir Khan100% (1)
- Solar Cars - The ReportDocument26 pagesSolar Cars - The ReportAnkit Gangwar50% (2)
- Solar CarsDocument23 pagesSolar CarsAkash Kumar .sNo ratings yet
- SOLWIN (Hybrid Solar-Wind Car)Document47 pagesSOLWIN (Hybrid Solar-Wind Car)Aditya SharmaNo ratings yet
- 45 - KirthanaDocument20 pages45 - KirthanaalysonmicheaalaNo ratings yet
- Solar Car ProjectDocument9 pagesSolar Car ProjectAravind GantiNo ratings yet
- An Overview: Solar CarsDocument14 pagesAn Overview: Solar CarsKunal SinhaNo ratings yet
- Solar Cars The Seminar ReportDocument26 pagesSolar Cars The Seminar ReportGarvit Midha100% (2)
- Solar CarsDocument30 pagesSolar Carsnaallamahesh0% (1)
- Design Report Cyclotron 33Document12 pagesDesign Report Cyclotron 33Hiếu NguyễnNo ratings yet
- 1st Phase CompleteDocument17 pages1st Phase CompleteBalaji C MNo ratings yet
- Regenerative BrakingDocument14 pagesRegenerative Braking19L129 - SAMRITHA DNo ratings yet
- KERSDocument17 pagesKERSAbhimanyu D JoshiNo ratings yet
- Final Project Report 1Document99 pagesFinal Project Report 1Sikander GirgoukarNo ratings yet
- Regenerative Brake: The Motor As A GeneratorDocument14 pagesRegenerative Brake: The Motor As A GeneratorBhavin MehtaNo ratings yet
- Flywheel Energy Storage by Bhupendra Kumar, SRMGPCDocument19 pagesFlywheel Energy Storage by Bhupendra Kumar, SRMGPCDeepak KumarNo ratings yet
- Analysis of The Regenerative Braking Efficiency of A Latest Electric VehicleDocument6 pagesAnalysis of The Regenerative Braking Efficiency of A Latest Electric VehicleJustinNo ratings yet
- Effect of Transmission Design On Electric Vehicle (EV) PerformanceDocument6 pagesEffect of Transmission Design On Electric Vehicle (EV) PerformanceSwati NikamNo ratings yet
- A Minor Project Report MEDocument18 pagesA Minor Project Report MEMudasir GureziNo ratings yet
- Go Kart REPORTDocument5 pagesGo Kart REPORTRayleighNo ratings yet
- Report On Wind Energy Vehicle: Submitted By: Vibhuti Kumar (1109020105) Branch: EEDocument14 pagesReport On Wind Energy Vehicle: Submitted By: Vibhuti Kumar (1109020105) Branch: EEvivek6681No ratings yet
- Piyali Pal Energy Efficient MotorDocument11 pagesPiyali Pal Energy Efficient MotorPiyali PalNo ratings yet
- Preliminary Design ReportDocument28 pagesPreliminary Design ReportpankajNo ratings yet
- Solar CarDocument6 pagesSolar CarHemaaHemaa50% (2)
- Physics Investigatory Project: Solar CarsDocument9 pagesPhysics Investigatory Project: Solar CarsDhanushreeNo ratings yet
- Engineering Rox - Regenerative Braking SystemDocument7 pagesEngineering Rox - Regenerative Braking SystemVivek SinghNo ratings yet
- Achieving Fuel Savings For Anchor Handling Tug Supply Vessels Through Electric Propulsion - ABBDocument4 pagesAchieving Fuel Savings For Anchor Handling Tug Supply Vessels Through Electric Propulsion - ABByw_oulalaNo ratings yet
- Urbino ElectricDocument9 pagesUrbino ElectricPhilippine Bus Enthusiasts Society0% (1)
- Solar Car 1Document81 pagesSolar Car 1harish321100% (3)
- KERS Electric Aims To Produce Electricity by A MotorcycleDocument24 pagesKERS Electric Aims To Produce Electricity by A MotorcycleabhishekajansondkarNo ratings yet
- Electric VehicleDocument18 pagesElectric VehicleSrinivas Shinu75% (4)
- Energy Efficient Motors Full Seminar Report, Abstract and Presentation DownloadDocument7 pagesEnergy Efficient Motors Full Seminar Report, Abstract and Presentation DownloadJIN KHATRI33% (3)
- Edge DriveDocument4 pagesEdge DriveNjeru WairaguNo ratings yet
- Edge DriveDocument4 pagesEdge DriveNjeru WairaguNo ratings yet
- Design and Development of A Parallel Hybrid Powertrain For A High Performance Sport Utility VehicleDocument12 pagesDesign and Development of A Parallel Hybrid Powertrain For A High Performance Sport Utility VehicleWooram KimNo ratings yet
- Solar Car Competition 2011Document20 pagesSolar Car Competition 2011Mohd Azim Albain100% (1)
- 13 Ijaet Vol III Issue II 2012Document6 pages13 Ijaet Vol III Issue II 2012Arun GargNo ratings yet
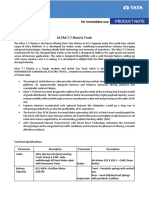
- Tata Ultra T 7 Electric BrochureDocument2 pagesTata Ultra T 7 Electric BrochuregopinadhNo ratings yet
- Kinetic Energy Recovery SystemDocument24 pagesKinetic Energy Recovery SystemVipin SekarNo ratings yet
- Department of Mechanical EngineeringDocument23 pagesDepartment of Mechanical EngineeringMail ManNo ratings yet
- Electric Propulsion SystemDocument2 pagesElectric Propulsion SystemABIR MUKHERJEENo ratings yet
- Solar Car: SMK Gombak SetiaDocument17 pagesSolar Car: SMK Gombak SetiamemosaNo ratings yet
- Design and Static Analysis of Regenerative Shock Absorber PDFDocument6 pagesDesign and Static Analysis of Regenerative Shock Absorber PDFKarthek SpNo ratings yet
- Electricity Generating Shock Absorber - Seminar Report, PPT, PDF For MechanicalDocument4 pagesElectricity Generating Shock Absorber - Seminar Report, PPT, PDF For MechanicalmobileNo ratings yet
- Physics Investigatory Project Solar CarDocument10 pagesPhysics Investigatory Project Solar CarPriyansh ShuklaNo ratings yet
- Mechanical KERS For Automotive ApplicationsDocument4 pagesMechanical KERS For Automotive ApplicationsVelshankar MJNo ratings yet
- Kers 3rdDocument45 pagesKers 3rdRknight BNo ratings yet
- BodyDocument44 pagesBodyBalaji C MNo ratings yet
- Midterm Project ReportDocument20 pagesMidterm Project Reportkaushal kumar sonkarNo ratings yet
- Anti Lock Brking SystemDocument30 pagesAnti Lock Brking SystemMayank GaurNo ratings yet
- Effi Cycle PresentationDocument13 pagesEffi Cycle Presentationwolfram77web100% (7)
- Ultra Low Fuel Consumption Hybrid CarDocument9 pagesUltra Low Fuel Consumption Hybrid CarDeanderthal VizmüllerNo ratings yet
- Automobile by KranthiDocument97 pagesAutomobile by KranthiVirat ChinnaNo ratings yet
- Mitsubishi ElevatorsDocument10 pagesMitsubishi ElevatorsAnonymous BwLfvuNo ratings yet
- Reducing Airlines’ Carbon Footprint: Using the Power of the Aircraft Electric Taxi SystemFrom EverandReducing Airlines’ Carbon Footprint: Using the Power of the Aircraft Electric Taxi SystemNo ratings yet
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsFrom EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNo ratings yet
- WeatherDocument1 pageWeatheramalNo ratings yet
- CDM Smith MilestoneDocument2 pagesCDM Smith MilestoneamalNo ratings yet
- OHS ChecklistDocument4 pagesOHS ChecklistamalNo ratings yet
- Major Landforms of The Earth Lesson6 NotesDocument5 pagesMajor Landforms of The Earth Lesson6 NotesamalNo ratings yet
- Assessment Sheet Ladder UseDocument3 pagesAssessment Sheet Ladder UseamalNo ratings yet
- Assessment Sheet Mobile Tower ScaffoldsDocument3 pagesAssessment Sheet Mobile Tower ScaffoldsamalNo ratings yet
- Working at Height: Assessment SheetDocument3 pagesWorking at Height: Assessment SheetamalNo ratings yet
- Toilet Cleaning Checklist: Checked by Cleaning Freq. Handwash Urinals Toilet GeneralDocument1 pageToilet Cleaning Checklist: Checked by Cleaning Freq. Handwash Urinals Toilet Generalamal100% (2)
- 5T Gantry CraneDocument1 page5T Gantry CraneamalNo ratings yet
- Assessment Sheet Use of HoistsDocument3 pagesAssessment Sheet Use of HoistsamalNo ratings yet
- 1 Identification of The Substance/mixture and of The Company/undertakingDocument8 pages1 Identification of The Substance/mixture and of The Company/undertakingamalNo ratings yet
- Scaffolding: Assessment SheetDocument3 pagesScaffolding: Assessment SheetamalNo ratings yet
- Office Safety GuidelinesDocument2 pagesOffice Safety GuidelinesamalNo ratings yet
- LUS-HSE-WG3-446-004.03 - Incident Reporting & InvestigationDocument13 pagesLUS-HSE-WG3-446-004.03 - Incident Reporting & InvestigationamalNo ratings yet
- Vehicle Refueling: City of Hamilton - Corporate Safety GuidelineDocument5 pagesVehicle Refueling: City of Hamilton - Corporate Safety GuidelineamalNo ratings yet
- Skyrak: Material Handling AttachmentDocument2 pagesSkyrak: Material Handling AttachmentamalNo ratings yet
- LUS-HSE-FM4-453-003.01 - Incident Investigation ReportDocument11 pagesLUS-HSE-FM4-453-003.01 - Incident Investigation ReportamalNo ratings yet
- LUS-HSE-WG3-446-011.01 - Emergency Planning & ResponseDocument15 pagesLUS-HSE-WG3-446-011.01 - Emergency Planning & ResponseamalNo ratings yet
- LUS-HSE-WG3-446-005.02 - Field and Office FacillitiesDocument13 pagesLUS-HSE-WG3-446-005.02 - Field and Office FacillitiesamalNo ratings yet
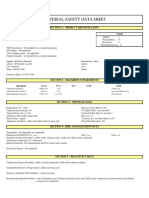
- Material Safety Data Sheet: Section 1: Product IdentificationDocument3 pagesMaterial Safety Data Sheet: Section 1: Product IdentificationamalNo ratings yet
- 13.2.9 RA SWP For Cable Installation Glanding Terminating Testing at DCL PDFDocument15 pages13.2.9 RA SWP For Cable Installation Glanding Terminating Testing at DCL PDFamalNo ratings yet
- Mcafee Mobile Security: The Ultimate Protection For Your Mobile LifeDocument2 pagesMcafee Mobile Security: The Ultimate Protection For Your Mobile LifeamalNo ratings yet
- Ee Roadinfra Tend 01Document3 pagesEe Roadinfra Tend 01Prasanna VswamyNo ratings yet
- Guide Wire OverviewDocument20 pagesGuide Wire OverviewpallaviNo ratings yet
- ACQ580 Poduct Specific Warranty Appendix - 3AXD10000506404 - BDocument10 pagesACQ580 Poduct Specific Warranty Appendix - 3AXD10000506404 - Bsaifurrahman binyulismanNo ratings yet
- Data Visualization EbookDocument15 pagesData Visualization EbookBittu RanaNo ratings yet
- Mitutoyo - Katalog USA-1005Document580 pagesMitutoyo - Katalog USA-1005D.T.No ratings yet
- JIP - Field Segmented Fittings - Phase 2 Report - FINAL - 12-06-11 - tcm153-484341Document127 pagesJIP - Field Segmented Fittings - Phase 2 Report - FINAL - 12-06-11 - tcm153-484341quiron2010No ratings yet
- ISO 37500 OutsourcingDocument17 pagesISO 37500 OutsourcingParichoy GuptaNo ratings yet
- Data Lake For HadoopDocument12 pagesData Lake For Hadoopg17_ram100% (2)
- FAPPPDocument422 pagesFAPPPMarcos David Revoredo MezaNo ratings yet
- Catalog YorkDocument91 pagesCatalog YorkedenNo ratings yet
- AS400 Job SchedulerDocument183 pagesAS400 Job Schedulerapi-27605687No ratings yet
- Scope of WorkDocument8 pagesScope of WorkGlenda CambelNo ratings yet
- ECE LawsDocument8 pagesECE LawsExequiel Xavier Caringal DiaNo ratings yet
- Training ProjectDocument93 pagesTraining ProjectSimu Matharu100% (1)
- PWC - Sizing The PrizeDocument32 pagesPWC - Sizing The PrizeAlpArıbalNo ratings yet
- BODIN & GASS - Exercises For Teaching The Analytic Hierarchy Process PDFDocument21 pagesBODIN & GASS - Exercises For Teaching The Analytic Hierarchy Process PDFAndriantsalamaNo ratings yet
- Supply Chain TechnologyDocument26 pagesSupply Chain TechnologyjosetaqueoNo ratings yet
- Hyperion Essbase Bootcamp ExercisesDocument74 pagesHyperion Essbase Bootcamp Exerciseslog_anupamNo ratings yet
- Quality Management System For Project DeliveryDocument3 pagesQuality Management System For Project DeliveryjxsxNo ratings yet
- ERP Project - FinalDocument66 pagesERP Project - FinalHiral PatelNo ratings yet
- Civil Engineering ProjectsDocument3 pagesCivil Engineering ProjectsMarvin Bryant Medina50% (2)
- ASSHTO Example Strut and TieDocument62 pagesASSHTO Example Strut and TieSothea Born100% (4)
- Specifications For Prefabricated BuildingDocument3 pagesSpecifications For Prefabricated Buildingm8877223No ratings yet
- AAC Wall System by Leichtbric - SGDocument8 pagesAAC Wall System by Leichtbric - SGChimmy GonzalezNo ratings yet
- Us 20190016231 A 1Document27 pagesUs 20190016231 A 1Fred Lamert100% (1)
- Printed Circuit Board Manufacturing ProcessDocument2 pagesPrinted Circuit Board Manufacturing ProcessDipesh AggarwalNo ratings yet
- A Project Report On Financial Performance Evaluation With Key Ratios at Vasavadatta Cement Kesoram Industries LTD Sedam GulbargaDocument82 pagesA Project Report On Financial Performance Evaluation With Key Ratios at Vasavadatta Cement Kesoram Industries LTD Sedam GulbargaK Sagar KondollaNo ratings yet
- CT660 BrochureDocument21 pagesCT660 BrochureCarlos Abel Conza LopezNo ratings yet
- RCA2600 User Manual Rev C PDFDocument9 pagesRCA2600 User Manual Rev C PDFMarcus DragoNo ratings yet