You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Sms 32 V 50Document107 pagesSms 32 V 50Mihret SaracNo ratings yet
- Car Park Digital ControllerDocument25 pagesCar Park Digital Controllermuddassir07100% (5)
- FP0Document20 pagesFP0ROMAJUSTE1No ratings yet
- s7300 fm352 Operating Instructions en en-US PDFDocument226 pagess7300 fm352 Operating Instructions en en-US PDFABNo ratings yet
- MP 8086 Lab Manual TRAINER KITDocument70 pagesMP 8086 Lab Manual TRAINER KITKavitha Subramaniam100% (1)
- Seca - 374 Baby Scale Service ManualDocument19 pagesSeca - 374 Baby Scale Service ManualWaseem AlmuhtasebNo ratings yet
- Carrier Sense Multiple AccessDocument12 pagesCarrier Sense Multiple AccessSisay ADNo ratings yet
- Bitcoin Price Prediction 5 - ColaboratoryDocument5 pagesBitcoin Price Prediction 5 - ColaboratorySisay ADNo ratings yet
- Bitcoin Price Prediction 5 - ColaboratoryDocument5 pagesBitcoin Price Prediction 5 - ColaboratorySisay ADNo ratings yet
- Bitcoin Price Prediction 5 - ColaboratoryDocument5 pagesBitcoin Price Prediction 5 - ColaboratorySisay ADNo ratings yet
- Ch07theinternetintranetsandextranets 111102113734 Phpapp01Document47 pagesCh07theinternetintranetsandextranets 111102113734 Phpapp01Sisay ADNo ratings yet
- Bitcoin Price Prediction 5 - ColaboratoryDocument5 pagesBitcoin Price Prediction 5 - ColaboratorySisay ADNo ratings yet
- CD&Oass 1234Document20 pagesCD&Oass 1234Sisay ADNo ratings yet
- Css TutorialDocument158 pagesCss TutorialpatatimNo ratings yet
- HTML TutorialDocument55 pagesHTML TutorialRaviRahulNo ratings yet
- Chap 2. Basic Encryption and Decryption: H. Lee KwangDocument37 pagesChap 2. Basic Encryption and Decryption: H. Lee KwangsarithasenaNo ratings yet
- Especificaciones Java EEDocument68 pagesEspecificaciones Java EERichard MeloNo ratings yet
- 414141Document1 page414141Sisay ADNo ratings yet
- QuestionDocument1 pageQuestionSisay ADNo ratings yet
- Project Ele 447Document29 pagesProject Ele 447Narendra AchariNo ratings yet
- Lec13 PDFDocument42 pagesLec13 PDFharry_i3tNo ratings yet
- Combinational MultiplierDocument5 pagesCombinational Multipliersouvik1112No ratings yet
- Computer Organization and Architecture Micro-OperationsDocument9 pagesComputer Organization and Architecture Micro-OperationsArvinder SinghNo ratings yet
- Chapter OneDocument27 pagesChapter OneSisay ADNo ratings yet
- Chap. 5 Basic Computer Org. and Design: 5-1 Instruction CodesDocument21 pagesChap. 5 Basic Computer Org. and Design: 5-1 Instruction CodesSisay ADNo ratings yet
- April 16th Presentation-JSDocument7 pagesApril 16th Presentation-JSSisay ADNo ratings yet
- An Expert System For Automotive DiagnosisDocument1 pageAn Expert System For Automotive DiagnosisSisay ADNo ratings yet
- Advanced Design For Robot in Mars ExplorationDocument6 pagesAdvanced Design For Robot in Mars ExplorationSisay ADNo ratings yet
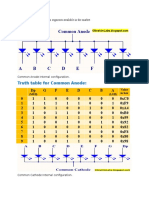
- Truth Table For Common AnodeDocument3 pagesTruth Table For Common AnodeSisay ADNo ratings yet
- Water Level PDFDocument8 pagesWater Level PDFGounalan BavaniNo ratings yet
- Laser Security System For HomeDocument19 pagesLaser Security System For HomeSelvakumar SubramaniNo ratings yet
- NODocument1 pageNOSisay ADNo ratings yet
- Introduction To Artificial Intelligence: By: Getaneh TDocument55 pagesIntroduction To Artificial Intelligence: By: Getaneh TSisay ADNo ratings yet
- Ch1 (1) (Compatibility Mode)Document45 pagesCh1 (1) (Compatibility Mode)Sisay ADNo ratings yet
- VDocument46 pagesVSisay ADNo ratings yet
- Lab Manual: Digital Electronics Lab (EE-224-F)Document33 pagesLab Manual: Digital Electronics Lab (EE-224-F)rv_andeNo ratings yet
- DRDDocument16 pagesDRDAnushree SaranNo ratings yet
- 4-Bit Counter Using Modified Master - Slave Edge Triggered RegisterDocument20 pages4-Bit Counter Using Modified Master - Slave Edge Triggered Registermilanjauhari0% (1)
- Lab 08Document16 pagesLab 08Aleena KhalidNo ratings yet
- Chapter 8 CounterDocument16 pagesChapter 8 CounterMUHAMMAD DANIEL AIMAN BIN MD AMANNo ratings yet
- EI6702-Logic and Distributed Control System PDFDocument15 pagesEI6702-Logic and Distributed Control System PDFlionelprakzy100% (1)
- Uni-Telway: ApplicomDocument52 pagesUni-Telway: Applicomalberto murguiaNo ratings yet
- EI Syllabus 3-8sem 2018Document129 pagesEI Syllabus 3-8sem 2018chetanNo ratings yet
- Using The Capture Module: Timer3 DescriptionDocument26 pagesUsing The Capture Module: Timer3 DescriptionGuillermo Hernandez100% (1)
- K L Code Hopping Decoder: EE OQ ®Document34 pagesK L Code Hopping Decoder: EE OQ ®Andres AlegriaNo ratings yet
- SN8P27143 V14 en PDFDocument130 pagesSN8P27143 V14 en PDFjuan echeverryNo ratings yet
- Embedded PDFDocument23 pagesEmbedded PDFKufaNo ratings yet
- Create Sinewcwes Using Digital IC's: 6 New CircuitsDocument4 pagesCreate Sinewcwes Using Digital IC's: 6 New CircuitsNatanael ManriqueNo ratings yet
- GPW Sie Mpi Mh01eaDocument52 pagesGPW Sie Mpi Mh01eaFathi MusaNo ratings yet
- Ex600 1 PDFDocument51 pagesEx600 1 PDFIlson JuniorNo ratings yet
- PL USD DLRDocument20 pagesPL USD DLRIkram ArifNo ratings yet
- Unit-1 (Computer Architecture)Document27 pagesUnit-1 (Computer Architecture)zakir hussainNo ratings yet
- Programming For Problem Solving LabDocument125 pagesProgramming For Problem Solving LabAbhik SenNo ratings yet
- Hardwired ControlDocument3 pagesHardwired ControlHulk ManNo ratings yet
- Lecture 2 - Combinational and Sequential LogicDocument27 pagesLecture 2 - Combinational and Sequential LogicGowthu GowthamiNo ratings yet
- Data SheetDocument9 pagesData Sheetdecabg591No ratings yet
- Alaram Clock DLDDocument31 pagesAlaram Clock DLDNatasha JacksonNo ratings yet
- Case Study For Mechatronic Design of A Coin CounterDocument4 pagesCase Study For Mechatronic Design of A Coin CounterMuhammad Jahangeer Qureshi100% (1)
- Example 39 - VGA ControllerDocument10 pagesExample 39 - VGA ControllerBárbara BabNo ratings yet