You might also like
- Trabajo Final de Maquinas Electricas 2Document10 pagesTrabajo Final de Maquinas Electricas 2Juan Carlos MojicaNo ratings yet
- Argumentar El Funcionamiento y El Arranque de Motor SincrónicoDocument11 pagesArgumentar El Funcionamiento y El Arranque de Motor Sincrónicoluis gonzalez100% (1)
- HT 4Document3 pagesHT 4MatthiasSibrianNo ratings yet
- Fugas en NeumaticaDocument4 pagesFugas en NeumaticaJavierNo ratings yet
- Preguntas de Unidad 4Document8 pagesPreguntas de Unidad 4JaviStg1No ratings yet
- Naturaleza y Condiciones Básicas de FallasDocument13 pagesNaturaleza y Condiciones Básicas de FallasMarco Antonio Cruz FalconNo ratings yet
- Paralelo de Las Maquinas SincronasDocument3 pagesParalelo de Las Maquinas Sincronasfer6669993No ratings yet
- Motor de CC Parte #2Document7 pagesMotor de CC Parte #2Coordinador Ejecutivo Juarez DosNo ratings yet
- Motor DC ShuntDocument2 pagesMotor DC ShuntCesar CasasNo ratings yet
- Prepa2 - maquinasII - SInche KleverDocument3 pagesPrepa2 - maquinasII - SInche KleverJuan David RamírezNo ratings yet
- 3Document4 pages3Elvis TubonNo ratings yet
- Circuito Equivalente de Motor de Induccion AsincronaDocument3 pagesCircuito Equivalente de Motor de Induccion AsincronaRenzo DezaNo ratings yet
- Motor A Tension Reducida Con Resistencias EscalonadasDocument2 pagesMotor A Tension Reducida Con Resistencias EscalonadasBolaños100% (1)
- Practica El Motor de Induccion TrifasicoDocument11 pagesPractica El Motor de Induccion TrifasicoAndrés CárdenasNo ratings yet
- Prepa2 - Guanoluisa CarlosDocument2 pagesPrepa2 - Guanoluisa CarlosJuan David RamírezNo ratings yet
- Practica 9 Curvas V Del Motor SincronoDocument3 pagesPractica 9 Curvas V Del Motor SincronoBraulio GutiérrezNo ratings yet
- Ejercicios de Aplicación (Sesión 03)Document7 pagesEjercicios de Aplicación (Sesión 03)Jhan Rojas Pérez100% (1)
- Práctica 4 Maq II Parametros Maq Sincro IT2018Document4 pagesPráctica 4 Maq II Parametros Maq Sincro IT2018David Leyton GuevaraNo ratings yet
- Practica Del Motor SincrónicoDocument8 pagesPractica Del Motor SincrónicoCarlos PilatasigNo ratings yet
- 1Document3 pages1Geraldo PitaNo ratings yet
- Tema 16Document40 pagesTema 16luis fernando0% (1)
- Practica 2 Maquinas ElectricasDocument5 pagesPractica 2 Maquinas Electricasmjencua60gmail.comNo ratings yet
- Practica 7Document9 pagesPractica 7Jesus MontantesNo ratings yet
- Frenado en Motores de Corriente DirectaDocument7 pagesFrenado en Motores de Corriente DirectaDarwin Cando Ligista de CorazonNo ratings yet
- Aplicaciones de Conversor de Frecuencia A Voltaje Final ConclusionesDocument3 pagesAplicaciones de Conversor de Frecuencia A Voltaje Final ConclusionesMarco Manuel Marca Castillo100% (1)
- Maquinas EspecialesDocument27 pagesMaquinas EspecialesJOse RodrIguezNo ratings yet
- Controlador Pid de Un Circuito RLC en SerieDocument7 pagesControlador Pid de Un Circuito RLC en SerieMarisol Tancara RoqueNo ratings yet
- Motor de CD CompuestoDocument16 pagesMotor de CD CompuestoMarco perez0% (1)
- Cuestionario de Maquinas Electricas 2 Cap 9Document4 pagesCuestionario de Maquinas Electricas 2 Cap 9dannyquizhpe100% (1)
- Práctica 8Document3 pagesPráctica 8Elías ArriolaNo ratings yet
- Trabajo Practico Maquina Sincronica TrifasicaDocument50 pagesTrabajo Practico Maquina Sincronica TrifasicaBruce ClozzaNo ratings yet
- Reportes de MaquinasDocument8 pagesReportes de MaquinasEliezer Lara100% (2)
- Ejercicios Cap 4Document24 pagesEjercicios Cap 4Alisson HerreraNo ratings yet
- Introducción A Control de MotoresDocument22 pagesIntroducción A Control de MotoresEdwin Santiago Villegas AuquesNo ratings yet
- Me Iii 09 Potencia en Maquinas Sincronas PDFDocument19 pagesMe Iii 09 Potencia en Maquinas Sincronas PDFRodrigo Iván Villagrán MontesinosNo ratings yet
- Motores Fase Partida, y TrifasicosDocument69 pagesMotores Fase Partida, y TrifasicosDavid R Mariñas50% (2)
- Efecto de Los Cambios de Carga en Un Motor SincrónicoDocument2 pagesEfecto de Los Cambios de Carga en Un Motor SincrónicoMiguel AngelNo ratings yet
- Caracteristicas en Vacio de Las Maquinas de Corriente ContinuaDocument16 pagesCaracteristicas en Vacio de Las Maquinas de Corriente ContinuaNeil ChoqueNo ratings yet
- Control de Motor Electrico Trifasico Por Estacion de Botones para Control ReversibleDocument6 pagesControl de Motor Electrico Trifasico Por Estacion de Botones para Control ReversibleAdrian Millan MartinezNo ratings yet
- Arranque de MotoresDocument5 pagesArranque de MotoresLuis Carlos MassNo ratings yet
- Arranque de Motores Jaula de ArdillaDocument10 pagesArranque de Motores Jaula de ArdillaMarcelo TolaNo ratings yet
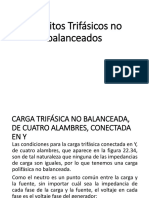
- Circuitos Trifásicos No BalanceadosDocument27 pagesCircuitos Trifásicos No BalanceadosDarvin MartinezNo ratings yet
- Arranque Manual de Motores de Induccion de Jaula de ArdillaDocument3 pagesArranque Manual de Motores de Induccion de Jaula de ArdillaSecm Chame MartinezNo ratings yet
- Practica 4 Maquinas SincronasDocument8 pagesPractica 4 Maquinas SincronasDaxterMancerNo ratings yet
- Introduccion A Sistemas CAD-CAE - Jonathan Andres Gonzalez Velasco PDFDocument6 pagesIntroduccion A Sistemas CAD-CAE - Jonathan Andres Gonzalez Velasco PDFJonathan GonzálezNo ratings yet
- LAB - ME - Preparatorio 02Document4 pagesLAB - ME - Preparatorio 02Jorge Chalco MHNo ratings yet
- Motores de Corriente Directa Fuerza Contraelectromotriz - UnlockedDocument19 pagesMotores de Corriente Directa Fuerza Contraelectromotriz - UnlockedCarlOs OzïlNo ratings yet
- Laboratorio 03 - MCC - Excitacion en SerieDocument7 pagesLaboratorio 03 - MCC - Excitacion en SerieVilma ChoqueNo ratings yet
- 3.5 Paralelaje de Alternadores SincronosDocument16 pages3.5 Paralelaje de Alternadores Sincronos'Antonio De Jesus67% (3)
- Pérdidas y Diagrama de Flujo de PotenciaDocument3 pagesPérdidas y Diagrama de Flujo de PotenciaWalter LemusNo ratings yet
- Metodo Simplex K82Document15 pagesMetodo Simplex K82Monse MorenoNo ratings yet
- Máquinas Eléctricas Capitulo 8.Document6 pagesMáquinas Eléctricas Capitulo 8.Darwin AlvaradoNo ratings yet
- Qué Podría Impedir La Elevación de Voltaje en El ArranqueDocument1 pageQué Podría Impedir La Elevación de Voltaje en El ArranqueLenin RomeroNo ratings yet
- Chicaiza Alejandro Práctica#1 InformeDocument3 pagesChicaiza Alejandro Práctica#1 InformeAlejandro Sebastian Chicaiza TipanNo ratings yet
- Entrega EXAMEN P 2. MAQUINAS ELECTRICAS IIDocument5 pagesEntrega EXAMEN P 2. MAQUINAS ELECTRICAS IIArturo PeñaNo ratings yet
- Practica 2, Motor en SerieDocument13 pagesPractica 2, Motor en SerieLope David0% (1)
- Practica #8 Maquinas de Corriente DirectaDocument9 pagesPractica #8 Maquinas de Corriente DirectaJorge Daniel MercadoNo ratings yet
- Motores de Corriente DirectaDocument18 pagesMotores de Corriente DirectaALEJANDRO HERNANDEZ TAPIANo ratings yet
- 08 Motores y Generadores DCDocument61 pages08 Motores y Generadores DCLuis Alfredo Ventura RamosNo ratings yet
- Motor SerieDocument13 pagesMotor SerieRUTH ELOISA HURTADONo ratings yet
- Plan Técnico Artes Plasticas Pintura (2013) 2Document108 pagesPlan Técnico Artes Plasticas Pintura (2013) 2Raul FernandezNo ratings yet
- Desarrollando Habilidades SensorialesDocument22 pagesDesarrollando Habilidades SensorialesMacarena Moraga SandovalNo ratings yet
- El ProtectorDocument3,319 pagesEl Protectormalemo7767% (3)
- ExperimentoDocument9 pagesExperimentoanon-331445100% (2)
- Taller de Costos 2Document2 pagesTaller de Costos 2Martha Ortega MorenoNo ratings yet
- Entendiendo Los Motores SumergiblesDocument12 pagesEntendiendo Los Motores SumergiblesvicbtoNo ratings yet
- Tarea II - Tarea III - Hormonas y PersonalidadDocument16 pagesTarea II - Tarea III - Hormonas y PersonalidadHenrry Antigua GonzalezNo ratings yet
- Triptico Semana Forestal NacionalDocument2 pagesTriptico Semana Forestal Nacionalval adriano73% (11)
- MovimaDocument10 pagesMovimaNicol ApNo ratings yet
- Planta MedicinalDocument11 pagesPlanta MedicinalMaria Teresa HerreraNo ratings yet
- Plan de Refuerzo ReligionDocument2 pagesPlan de Refuerzo ReligionMonica Martinez50% (2)
- Informe Practico de Fisica Marco OrellanaDocument4 pagesInforme Practico de Fisica Marco OrellanaMarco OrellanaNo ratings yet
- 2015 Spanish Envejecer Menos - CompressDocument18 pages2015 Spanish Envejecer Menos - CompressEDUARDONo ratings yet
- Cuadro Sinóptico ConductismoDocument1 pageCuadro Sinóptico ConductismoAngelica FuentesNo ratings yet
- Las 5 Fuerzas de PorterDocument8 pagesLas 5 Fuerzas de PorterMaria MaytaNo ratings yet
- La HidrosferaDocument15 pagesLa HidrosferabrizzNo ratings yet
- 0ejercicios 8 y 9 de Teoria Economica-PatatabravaDocument12 pages0ejercicios 8 y 9 de Teoria Economica-PatatabravaPaola HERNANDEZ GOMEZNo ratings yet
- PAVAN DescripciónDocument4 pagesPAVAN DescripciónWein ImporterNo ratings yet
- 3° de Secundaria AP - 1° TrimestreDocument17 pages3° de Secundaria AP - 1° TrimestreAlem Amed Rojas UgarteNo ratings yet
- Evaluacion Trabajo en CalienteDocument2 pagesEvaluacion Trabajo en Calientegonzors0% (1)
- Trabajo Completo HipertensionDocument35 pagesTrabajo Completo HipertensionAleex SiguenzaNo ratings yet
- 9.manejo de ResiduosDocument6 pages9.manejo de ResiduosCONSORCIO ANDRES 2020No ratings yet
- Reconocimiento de SemillasDocument16 pagesReconocimiento de SemillasNicole Irene100% (1)
- Baja Montante Ø 2" Y Sube Tub. Vent. Ø 2"Document1 pageBaja Montante Ø 2" Y Sube Tub. Vent. Ø 2"Romario Villasante ValderramaNo ratings yet
- Ismael y La Salvacion de La TierraDocument65 pagesIsmael y La Salvacion de La Tierrafabi_kuleff100% (1)
- Huella de Carbono YoneiderDocument25 pagesHuella de Carbono YoneiderYONEIDER JOSE MENDOZA GAMEZ (:-)No ratings yet
- Fascículo Unidad 2 - Sesión 1Document28 pagesFascículo Unidad 2 - Sesión 1Rosa Carranza Davila100% (2)
- M.P. Joaqd PDFDocument99 pagesM.P. Joaqd PDFYecid Brayam Poma CallisayaNo ratings yet
- SanyDocument13 pagesSanyJorgeSánchezNúñezNo ratings yet
- Plan de Gobierno Del Distrito de Unicachi AÑO 2023-2026Document8 pagesPlan de Gobierno Del Distrito de Unicachi AÑO 2023-2026Javier QuispeNo ratings yet