You might also like
- Online Instructor's Manual For Digital Fundamentals - 11 Ed.Document26 pagesOnline Instructor's Manual For Digital Fundamentals - 11 Ed.Aqueel Amir Ali78% (9)
- Software Engineering for Embedded Systems: Methods, Practical Techniques, and ApplicationsFrom EverandSoftware Engineering for Embedded Systems: Methods, Practical Techniques, and ApplicationsRating: 2.5 out of 5 stars2.5/5 (2)
- Aircraft DO 254Document14 pagesAircraft DO 254Marcos Arend100% (2)
- MATLAB Simulink For Engineering EducationDocument32 pagesMATLAB Simulink For Engineering EducationKalyan GovindarajanNo ratings yet
- System Software: An Introduction To Systems Programming Leland L. Beck 3rd Edition Addison-Wesley, 1997Document40 pagesSystem Software: An Introduction To Systems Programming Leland L. Beck 3rd Edition Addison-Wesley, 1997Shoyab Ahamed50% (4)
- Quartus II Introduction PDFDocument38 pagesQuartus II Introduction PDFwindywake3910No ratings yet
- Asic and Fpga DesignDocument24 pagesAsic and Fpga DesignGiri ReddyNo ratings yet
- Intro To FPGA Design Using MATLAB and Simulink PublishedDocument31 pagesIntro To FPGA Design Using MATLAB and Simulink PublishedelectrocarbonNo ratings yet
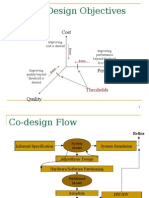
- Review: Design Objectives: ThresholdsDocument19 pagesReview: Design Objectives: ThresholdsSahadev RoyNo ratings yet
- Hardware-Software Co-Partitioning For Distributed Embedded SystemsDocument41 pagesHardware-Software Co-Partitioning For Distributed Embedded SystemsRaghu RamNo ratings yet
- Simplified FPGA Design Implementation FlowDocument36 pagesSimplified FPGA Design Implementation FlowRajendra PrasadNo ratings yet
- Vlsi Lab Manual 2013Document64 pagesVlsi Lab Manual 2013harish33330% (1)
- Sandeepalani Course of 16 WeeksDocument3 pagesSandeepalani Course of 16 WeeksNitesh JadhavNo ratings yet
- Cdnlive Jungeblut PaperDocument5 pagesCdnlive Jungeblut PaperSamNo ratings yet
- Generating Optimizing and Verifying HDL Code With Matlab and SimulinkDocument46 pagesGenerating Optimizing and Verifying HDL Code With Matlab and Simulinkkpkarthi80No ratings yet
- Introduction To System On ChipDocument110 pagesIntroduction To System On ChipKiệt PhạmNo ratings yet
- C 2030 Lundgren Gedae Gedae For CertificationDocument24 pagesC 2030 Lundgren Gedae Gedae For Certificationsandia_docsNo ratings yet
- Scoot Tacas08Document4 pagesScoot Tacas08mickeladam11No ratings yet
- Platform Based Behavior Level and SystemDocument4 pagesPlatform Based Behavior Level and Systemhemanth235No ratings yet
- Introduction To System On ChipDocument110 pagesIntroduction To System On ChipKhNo ratings yet
- Model Based Design From Concept To ProductionDocument40 pagesModel Based Design From Concept To ProductionSamRuDinNo ratings yet
- DFT-Formal VerificationDocument29 pagesDFT-Formal Verificationyhossam95No ratings yet
- Asic Design Flow: Submitted To:-Submitted By: - Manju K. Chattopadhyay Purvi Medawala 14MTES11Document18 pagesAsic Design Flow: Submitted To:-Submitted By: - Manju K. Chattopadhyay Purvi Medawala 14MTES11CLARITY UDTNo ratings yet
- 8.programmable Asic Design SoftwareDocument21 pages8.programmable Asic Design Softwaresalinsweety50% (2)
- Digital System Design & SynthesisDocument32 pagesDigital System Design & Synthesistej.vadla7No ratings yet
- System On Chip Design and ModellingDocument131 pagesSystem On Chip Design and ModellingGurram KishoreNo ratings yet
- Vlsi Design FlowDocument7 pagesVlsi Design FlowAster RevNo ratings yet
- Psoc Handbook Manual OfficialDocument78 pagesPsoc Handbook Manual Officialsantosh_babar_26No ratings yet
- CH 01Document37 pagesCH 01Kiran EceNo ratings yet
- System-On-Chip Design Introduction: Marcel Jacomet Bern University of Applied Sciences Bfh-Ti Huce-Microlab, Biel/BienneDocument55 pagesSystem-On-Chip Design Introduction: Marcel Jacomet Bern University of Applied Sciences Bfh-Ti Huce-Microlab, Biel/BienneboppanamuralikrishnaNo ratings yet
- Flexible Tools For Interactive Model-Based Control Design and SimulationDocument55 pagesFlexible Tools For Interactive Model-Based Control Design and SimulationArun KumarNo ratings yet
- Rapid-Prototyping Emulation System For Embedded System Hardware VDocument14 pagesRapid-Prototyping Emulation System For Embedded System Hardware VTechnical NoviceNo ratings yet
- Hardware Performance Simulations of Round 2 Advanced Encryption Standard AlgorithmsDocument55 pagesHardware Performance Simulations of Round 2 Advanced Encryption Standard AlgorithmsMihai Alexandru OlaruNo ratings yet
- Introduction To FPGADocument29 pagesIntroduction To FPGAMohan Babu ANo ratings yet
- Cdac Vlsi Course StructureDocument2 pagesCdac Vlsi Course Structuresureshr_42No ratings yet
- Dependent Sources, Passive ElementsDocument3 pagesDependent Sources, Passive ElementsSridhar ChandrasekarNo ratings yet
- Fpga Design FlowDocument3 pagesFpga Design FlowShaik IliyasNo ratings yet
- Just-In-Time Compilation andDocument29 pagesJust-In-Time Compilation andDilip TheLipNo ratings yet
- Asic Design FlowDocument2 pagesAsic Design Flowravi3192No ratings yet
- Summer Training VHDLDocument38 pagesSummer Training VHDLmjcetpaNo ratings yet
- Alpha Breathing: (2 Mins) : - Breathe in - Breathe Out - HoldDocument27 pagesAlpha Breathing: (2 Mins) : - Breathe in - Breathe Out - HoldAnil KumarNo ratings yet
- Snug04 Bromley Smith PaperDocument16 pagesSnug04 Bromley Smith PaperDheeraj SinglaNo ratings yet
- Asic Design FlowDocument2 pagesAsic Design Flowapi-3696047100% (1)
- Introduction To VHDL: Course Objectives AffectedDocument7 pagesIntroduction To VHDL: Course Objectives AffectedsabbithiNo ratings yet
- Unit 4Document26 pagesUnit 4Dr. M V GANESWARA RAONo ratings yet
- CIS775: Computer Architecture: Chapter 1: Fundamentals of Computer DesignDocument43 pagesCIS775: Computer Architecture: Chapter 1: Fundamentals of Computer DesignPranjal JainNo ratings yet
- R&D Facilities at ECE DepartmentDocument3 pagesR&D Facilities at ECE DepartmentArpita MukherjeeNo ratings yet
- Verification of High Performance Embedded Systems: Sisira K. Amarasinghe, PH.DDocument82 pagesVerification of High Performance Embedded Systems: Sisira K. Amarasinghe, PH.DRachana SrinivasNo ratings yet
- Design Flow VlsiDocument42 pagesDesign Flow VlsiRahul ShandilyaNo ratings yet
- CpE321L Lesson 1 - Introduction To IC Design and HDLDocument38 pagesCpE321L Lesson 1 - Introduction To IC Design and HDLSebastian KarlNo ratings yet
- SOC - System On Chip SeminarDocument8 pagesSOC - System On Chip SeminarUlhas N. GangjiNo ratings yet
- DSP Adoptive FilterDocument9 pagesDSP Adoptive FilterIsmail MalikNo ratings yet
- Cshardware PortfolioDocument3 pagesCshardware Portfolioapi-243868301No ratings yet
- Wireless Sensor Networks Laboratory: SRM Institute of Science and TechnologyDocument9 pagesWireless Sensor Networks Laboratory: SRM Institute of Science and TechnologyRevathi PrakashNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Embedded Software Design and Programming of Multiprocessor System-on-Chip: Simulink and System C Case StudiesFrom EverandEmbedded Software Design and Programming of Multiprocessor System-on-Chip: Simulink and System C Case StudiesNo ratings yet
- Embedded Systems Design with Platform FPGAs: Principles and PracticesFrom EverandEmbedded Systems Design with Platform FPGAs: Principles and PracticesRating: 5 out of 5 stars5/5 (1)
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- RRDocument1 pageRRRaghu RamNo ratings yet
- CMOS Technology and Logic Gates: Only 15,432,758 More Mosfets To Do..Document37 pagesCMOS Technology and Logic Gates: Only 15,432,758 More Mosfets To Do..Raghu RamNo ratings yet
- Mev Cm2/Mg (I.E., Mev/Cm Divided by Mg/Cm2)Document2 pagesMev Cm2/Mg (I.E., Mev/Cm Divided by Mg/Cm2)Raghu RamNo ratings yet
- Internal Marks ReportDocument4 pagesInternal Marks ReportRaghu RamNo ratings yet
- 3 1Document22 pages3 1Raghu RamNo ratings yet
- Objective 8085Document18 pagesObjective 8085Raghu RamNo ratings yet
- Marks Duty Sessional I D Sec Not EnteredDocument3 pagesMarks Duty Sessional I D Sec Not EnteredRaghu RamNo ratings yet
- A. Explain The Significance of PIN 31, Pin 18, and 19 in 8051 MicrocontrollerDocument8 pagesA. Explain The Significance of PIN 31, Pin 18, and 19 in 8051 MicrocontrollerRaghu RamNo ratings yet
- ECE EC5001: Dept Results AnalysisDocument10 pagesECE EC5001: Dept Results AnalysisRaghu RamNo ratings yet
- Scientech 2272ADocument2 pagesScientech 2272ARaghu RamNo ratings yet
- Budget 10-11 NBADocument3 pagesBudget 10-11 NBARaghu RamNo ratings yet
- XSTDocument412 pagesXSTNaman BhayaniNo ratings yet
- Asic Part1Document147 pagesAsic Part1ashfaqalimkNo ratings yet
- HDL Project Report On Automatic WashingDocument17 pagesHDL Project Report On Automatic WashingMuyeez AktharNo ratings yet
- Lab 1Document5 pagesLab 1tttm2609No ratings yet
- My First FpgaDocument47 pagesMy First FpgashadoNo ratings yet
- LogicWorks 5 Version HistoryDocument3 pagesLogicWorks 5 Version HistoryEman IshaqNo ratings yet
- HIL Webinar PDFDocument50 pagesHIL Webinar PDFRoberto Eduardo Quintal PalomoNo ratings yet
- Design of Hamming Code Using VerilogDocument18 pagesDesign of Hamming Code Using VerilogDevanshu AnandNo ratings yet
- VHDL Implementation of 8-Bit ALU: Arshabha AryaDocument7 pagesVHDL Implementation of 8-Bit ALU: Arshabha Aryamohammad aidilNo ratings yet
- Identify ME H-2013.03M-SP1 User Guide PDFDocument214 pagesIdentify ME H-2013.03M-SP1 User Guide PDFParjanya Sai Krishna YellapragadaNo ratings yet
- Readme TR0511Document114 pagesReadme TR0511dstoliarNo ratings yet
- Best FPGA Development Practices 2014-02-20Document16 pagesBest FPGA Development Practices 2014-02-20Aaron RobbinsNo ratings yet
- ECEN 714 Lecture 1Document60 pagesECEN 714 Lecture 1Abhineet BhojakNo ratings yet
- Double Data Rate I/O (ALTDDIO - IN, ALTDDIO - OUT, and ALTDDIO - BIDIR) IP Cores User GuideDocument22 pagesDouble Data Rate I/O (ALTDDIO - IN, ALTDDIO - OUT, and ALTDDIO - BIDIR) IP Cores User Guidesantanu_sinha87No ratings yet
- MTech VLSI Syllabus 2015 16Document43 pagesMTech VLSI Syllabus 2015 16palagani muralibabuNo ratings yet
- Model-Based Design For Embedded Control Systems: White PaperDocument12 pagesModel-Based Design For Embedded Control Systems: White Papersam hamNo ratings yet
- VHDL Stands For VHSIC Hardware Description LanguageDocument15 pagesVHDL Stands For VHSIC Hardware Description LanguageNoti GalNo ratings yet
- M2 Session4Document17 pagesM2 Session4Amarnath KambaleNo ratings yet
- L02 - Introduction To VerilogDocument17 pagesL02 - Introduction To VerilogAlinaNo ratings yet
- Qts Qii51007Document76 pagesQts Qii51007Nisreen AlhamriNo ratings yet
- Urkund Report - Amit Thesis Report - Plagcheck - Docx (D47399055)Document43 pagesUrkund Report - Amit Thesis Report - Plagcheck - Docx (D47399055)vickram jainNo ratings yet
- Verilog SlidesDocument24 pagesVerilog SlidesDeepikaa PoobalarajaNo ratings yet
- Native Testbench TutorialDocument66 pagesNative Testbench TutorialPrabakaran EllaiyappanNo ratings yet
- HDL Manual 3 June 2022Document83 pagesHDL Manual 3 June 2022Ram Kumar SinghNo ratings yet
- Verilog HDL A Guide To Digital Design and Synthesis Samir Palnitkar Sunsoft Press 1996Document3 pagesVerilog HDL A Guide To Digital Design and Synthesis Samir Palnitkar Sunsoft Press 1996Pramod Reddy RNo ratings yet
- VHDL FinalDocument152 pagesVHDL FinalManish YadavNo ratings yet
- MODEL ANSWER KEY VLSI-converted-compressedDocument28 pagesMODEL ANSWER KEY VLSI-converted-compressedPradeep ravichanderNo ratings yet