You might also like
- Mechanical Vibrations For Engineers AbDocument219 pagesMechanical Vibrations For Engineers Abshyamsundarsr100% (2)
- 80 REAL TIME SELENIUM Interview Questions and Answers List of Top Selenium Interview Questions and Answers For Freshers Beginners and Experienced PDFDocument45 pages80 REAL TIME SELENIUM Interview Questions and Answers List of Top Selenium Interview Questions and Answers For Freshers Beginners and Experienced PDFPuneet Bahri83% (29)
- EEP-SSA-EC-0001 - Grounding CalculationDocument23 pagesEEP-SSA-EC-0001 - Grounding Calculationjie zhangNo ratings yet
- Design Parameters of Driver Seat in An AutomobileDocument5 pagesDesign Parameters of Driver Seat in An AutomobilePuneet BahriNo ratings yet
- CN Chap10 - Moments of InertiaDocument25 pagesCN Chap10 - Moments of Inertiaengineer_atulNo ratings yet
- 3 Forced VibrationsDocument62 pages3 Forced VibrationsAshishAgarwalNo ratings yet
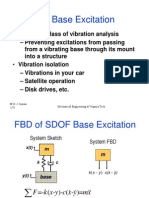
- 2.4 Base Excitation: - Important Class of Vibration Analysis - Preventing Excitations From PassingDocument51 pages2.4 Base Excitation: - Important Class of Vibration Analysis - Preventing Excitations From Passingpriyankar007No ratings yet
- Vibration EngineeringDocument37 pagesVibration EngineeringAlen Benguit II0% (1)
- Stator Winding Induction Motor in The EMTPDocument8 pagesStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaNo ratings yet
- Solution Thermodynamics LecturesDocument74 pagesSolution Thermodynamics LecturesS S S REDDY100% (1)
- Earthquake EngineeringDocument79 pagesEarthquake EngineeringLuis MontoyaNo ratings yet
- Assignment 1 Solution (Doctor) PDFDocument14 pagesAssignment 1 Solution (Doctor) PDFAhmed KhairiNo ratings yet
- MECH1230 Exam Paper v4 2013 2014 SolutionsDocument18 pagesMECH1230 Exam Paper v4 2013 2014 SolutionssebNo ratings yet
- LNA Design ProjectDocument18 pagesLNA Design ProjectCrystal ChenNo ratings yet
- MD1 Assignment 2 MT Period Clutches TongcoDocument3 pagesMD1 Assignment 2 MT Period Clutches TongcoLister NambatacNo ratings yet
- XSteam Excel v2.6Document3 pagesXSteam Excel v2.6pchanycNo ratings yet
- EarthingDocument8 pagesEarthingboopelectraNo ratings yet
- Materials Science and Technology of Optical FabricationFrom EverandMaterials Science and Technology of Optical FabricationNo ratings yet
- AEEC432 Rectilinear ControlDocument46 pagesAEEC432 Rectilinear ControlMelina Andrea ZiccorNo ratings yet
- An Introduction To Electrostatic ActuatorDocument32 pagesAn Introduction To Electrostatic Actuatormujeeb.abdullah2830No ratings yet
- Tutorial 12 2nd Order Differential Equation V2Document3 pagesTutorial 12 2nd Order Differential Equation V2Shamsul BaruddinNo ratings yet
- Section5 1Document22 pagesSection5 1sonti11No ratings yet
- Section2 4Document11 pagesSection2 4sonti11No ratings yet
- Ph3 Chapter ThemechanicaloscillatorDocument17 pagesPh3 Chapter ThemechanicaloscillatorscrewyouregNo ratings yet
- DynamicsDocument80 pagesDynamicsalexNo ratings yet
- m7l13 PDFDocument10 pagesm7l13 PDFPradip GuptaNo ratings yet
- MultiLayer DONEDocument13 pagesMultiLayer DONEDouglas ColvinNo ratings yet
- Harmonics Reduction 1Document10 pagesHarmonics Reduction 1Swaminathan SrinivasanNo ratings yet
- 2004 CSAcoust SimDocument6 pages2004 CSAcoust SimberndNo ratings yet
- (Reading Assignment) : EE42/100-Spring 2006Document4 pages(Reading Assignment) : EE42/100-Spring 2006Sova ŽalosnaNo ratings yet
- General Power System Dynamic Modeling: Signals Dynamics and Control (2010/11)Document16 pagesGeneral Power System Dynamic Modeling: Signals Dynamics and Control (2010/11)Paulo RijoNo ratings yet
- Section2 5Document6 pagesSection2 5sonti11No ratings yet
- Torque Production in Permanent-MagnetDocument6 pagesTorque Production in Permanent-MagnetTien Dung TranNo ratings yet
- Modeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABDocument26 pagesModeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABRajesh NayakNo ratings yet
- Faults Detection in Gas Turbine Rotor Using Vibration Analysis Under Varying ConditionsDocument14 pagesFaults Detection in Gas Turbine Rotor Using Vibration Analysis Under Varying ConditionsscribdkhatnNo ratings yet
- Dynamics and VibrationsDocument19 pagesDynamics and Vibrationsadhi2796No ratings yet
- Effect of Compensation Factor On The Subsynchronous Resonance in Single Machine Infinite Bus SystemDocument6 pagesEffect of Compensation Factor On The Subsynchronous Resonance in Single Machine Infinite Bus SystemLong LeoNo ratings yet
- Vib QN Paper Test IIDocument4 pagesVib QN Paper Test IIRaghupathi ManickamNo ratings yet
- Modeling in The Frequency Domain: Prof. Ju-Jang LeeDocument32 pagesModeling in The Frequency Domain: Prof. Ju-Jang LeeMohammad HassanNo ratings yet
- Control Systems Systems and Their Representations Unit-1: Ms. P. Geethanjali Asst. Professor (SR) SelectDocument72 pagesControl Systems Systems and Their Representations Unit-1: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument32 pagesDynamics: Vector Mechanics For Engineersعبدالله عمرNo ratings yet
- Discriminator and Energy Based Demodulators: RevisitedDocument4 pagesDiscriminator and Energy Based Demodulators: RevisitedShakeel RanaNo ratings yet
- Section 1.8 Stability: Stability Is Defined For The Solution of Free Response CaseDocument24 pagesSection 1.8 Stability: Stability Is Defined For The Solution of Free Response CaserajasekharjvNo ratings yet
- Introduction To Mechanical Vibration - Unit 1 - Assignment 1Document3 pagesIntroduction To Mechanical Vibration - Unit 1 - Assignment 1Rafael LicaNo ratings yet
- Mechanical Engineering Department Mechanical Vibration (Met-351) Tutorial 1Document15 pagesMechanical Engineering Department Mechanical Vibration (Met-351) Tutorial 1Aakash SinglaNo ratings yet
- Review PPT Modified KLJLKDocument30 pagesReview PPT Modified KLJLKPranith KumarNo ratings yet
- Calculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station PrefaceDocument11 pagesCalculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station Prefaceh_salkicNo ratings yet
- Dynamic Analysis of The Stress and Strain State of The Spur Gear PairDocument6 pagesDynamic Analysis of The Stress and Strain State of The Spur Gear PairMabelus BurgerNo ratings yet
- RegelTechniek1 2014Document3 pagesRegelTechniek1 2014John AppleseedNo ratings yet
- An Optimal Balancing Structure For Small and Medium Electrical Machine RotorsDocument9 pagesAn Optimal Balancing Structure For Small and Medium Electrical Machine Rotorsikram09568519No ratings yet
- Nonlinear GuideDocument17 pagesNonlinear Guidepiv0ter_betterNo ratings yet
- DTGDocument9 pagesDTGkapilkumar18No ratings yet
- Automobile Suspension Design: Ian Arlen, Paul Gu Enette, & Ariel LevyDocument10 pagesAutomobile Suspension Design: Ian Arlen, Paul Gu Enette, & Ariel LevyHermesNo ratings yet
- Modeling and Analysis of Elevated Skid Mounted High Speed Compressor StructureDocument44 pagesModeling and Analysis of Elevated Skid Mounted High Speed Compressor Structuremasum91032No ratings yet
- Electronics 08 00221Document13 pagesElectronics 08 00221AMAN GOYALNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument32 pagesDynamics: Vector Mechanics For EngineersKrishnakumar ThekkepatNo ratings yet
- Robust Control Design For Maglev Train With Parametric Uncertainties Using - SynthesisDocument7 pagesRobust Control Design For Maglev Train With Parametric Uncertainties Using - SynthesisRaj PurohitNo ratings yet
- Manual Performance Analysis of A 2.2kw Refurbished Three-Phase Induction MotorDocument7 pagesManual Performance Analysis of A 2.2kw Refurbished Three-Phase Induction MotorInternational Organization of Scientific Research (IOSR)No ratings yet
- DownloadDocument2 pagesDownloadManoesh JohnNo ratings yet
- Earthquake 1893 Example Numerical Civil Engineering ProblemDocument12 pagesEarthquake 1893 Example Numerical Civil Engineering ProblemMohsin KhanNo ratings yet
- An Introduction To Discrete Wavelet TransformsDocument36 pagesAn Introduction To Discrete Wavelet TransformsAtacan ÖzkanNo ratings yet
- Gate Mechanical Engineering 2010Document8 pagesGate Mechanical Engineering 2010aeroherozNo ratings yet
- Antenna Azimuth and Its Simulation by Lab View Program: School of Electrical and Electronoic EngineeringDocument25 pagesAntenna Azimuth and Its Simulation by Lab View Program: School of Electrical and Electronoic EngineeringKenneth CastroNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Qsys Pro: A10 Nios II Hello WorldDocument28 pagesQsys Pro: A10 Nios II Hello WorldPuneet BahriNo ratings yet
- Agile1 AnswerDocument5 pagesAgile1 AnswerPuneet BahriNo ratings yet
- Class - IX (English) The Road Not Taken (Multiple Choice Questions)Document16 pagesClass - IX (English) The Road Not Taken (Multiple Choice Questions)Puneet BahriNo ratings yet
- Serv - Chula.ac - TH Pphongsa Teaching Vibration Ch3Document95 pagesServ - Chula.ac - TH Pphongsa Teaching Vibration Ch3Puneet BahriNo ratings yet
- The Numerical Simulation of Foam - An Example of Inter-Industrial SynergyDocument17 pagesThe Numerical Simulation of Foam - An Example of Inter-Industrial SynergyPuneet BahriNo ratings yet
- Result Result Result: True Public Void Throws IfDocument1 pageResult Result Result: True Public Void Throws IfPuneet BahriNo ratings yet
- Erke Wang-Ansys ContactDocument42 pagesErke Wang-Ansys ContactanilmaviNo ratings yet
- MRev High Deck Bus Rollover PDFDocument54 pagesMRev High Deck Bus Rollover PDFPuneet BahriNo ratings yet
- Seat Belts & Child RestraintsDocument228 pagesSeat Belts & Child RestraintsautocontactNo ratings yet
- Frequently Asked Questions - Formatting and Publishing An SAE Technical PaperDocument3 pagesFrequently Asked Questions - Formatting and Publishing An SAE Technical PaperPuneet BahriNo ratings yet
- Title Filename Menu DocsDocument1 pageTitle Filename Menu DocsPuneet BahriNo ratings yet
- Fea of Seat As Per AIS 023 Test RequirementsDocument8 pagesFea of Seat As Per AIS 023 Test RequirementsPuneet BahriNo ratings yet
- U.S. Department of Transportation: National Highway Traffic Safety AdministrationDocument31 pagesU.S. Department of Transportation: National Highway Traffic Safety AdministrationPuneet BahriNo ratings yet
- Guru Nanak Dev Engg College LudhianaDocument7 pagesGuru Nanak Dev Engg College LudhianaPuneet BahriNo ratings yet
- Seatbelt 2 D GuidelineDocument6 pagesSeatbelt 2 D GuidelinePuneet BahriNo ratings yet
- 03 Borrvall DYNAmoreNordic PDocument22 pages03 Borrvall DYNAmoreNordic PPuneet BahriNo ratings yet
- In Home Service Sow UkDocument7 pagesIn Home Service Sow UkPuneet BahriNo ratings yet
- Connecting Your Solar Electric System To The Utility Grid: A Winning Combination-Design, Efficiency, and Solar TechnologyDocument2 pagesConnecting Your Solar Electric System To The Utility Grid: A Winning Combination-Design, Efficiency, and Solar TechnologyPuneet BahriNo ratings yet
- Iphone Finger Tips GuideDocument2 pagesIphone Finger Tips GuidePuneet BahriNo ratings yet
- Application of Shell Honeycomb Model To IIHS MDB Model: AuthorsDocument10 pagesApplication of Shell Honeycomb Model To IIHS MDB Model: AuthorsPuneet BahriNo ratings yet
- Muhammad Sahimi Heterogeneous Materials I LineaDocument793 pagesMuhammad Sahimi Heterogeneous Materials I LineadashatanliNo ratings yet
- E 140Document23 pagesE 140Luna Hernandez Ricardo100% (1)
- Problem Set 6: 2m 00 E E Ikx IkxDocument3 pagesProblem Set 6: 2m 00 E E Ikx IkxDaljot Singh KangNo ratings yet
- A Strategy To Determine A Heating CurveDocument8 pagesA Strategy To Determine A Heating CurveHatef HajianNo ratings yet
- Mathcad - Trinity Bearing Capacity - MDKDocument5 pagesMathcad - Trinity Bearing Capacity - MDKjcazNo ratings yet
- OPSS 1202 Nov08Document10 pagesOPSS 1202 Nov08Safa GhasemkhaniNo ratings yet
- Equilibrium Powerpoint Physics 12 LectureDocument25 pagesEquilibrium Powerpoint Physics 12 LectureQueenielyn TagraNo ratings yet
- Part I: Multiple Choice: Physisc 82 - 1 Semester AY '16 - 17Document4 pagesPart I: Multiple Choice: Physisc 82 - 1 Semester AY '16 - 17deusleanNo ratings yet
- Physics 141 Week 2 Solutions - UNLDocument3 pagesPhysics 141 Week 2 Solutions - UNLDillon HikeNo ratings yet
- The Settling ChamberDocument6 pagesThe Settling ChamberererdNo ratings yet
- The Chemistry, Morphology, Topography of TitaniumDocument11 pagesThe Chemistry, Morphology, Topography of TitaniumtihinjoNo ratings yet
- VFD Causing Motor VibrationDocument4 pagesVFD Causing Motor Vibrationwaqas_a_shaikh4348No ratings yet
- 2016-GE-26 37 1 CEP Rock MechanicsDocument13 pages2016-GE-26 37 1 CEP Rock MechanicsRMRE UETNo ratings yet
- Forces Motion BasicsDocument3 pagesForces Motion BasicsMadeline SibuloNo ratings yet
- John Ashton Arizona Speech 2013Document6 pagesJohn Ashton Arizona Speech 2013climatehomescribdNo ratings yet
- 13 Structural LoosenessDocument1 page13 Structural LoosenessmtttusharNo ratings yet
- T 7 OxDocument2 pagesT 7 OxMiguel Dominguez de GarcíaNo ratings yet
- Helmholtz Free Energy PDFDocument6 pagesHelmholtz Free Energy PDFDuà Zàhrä RìzvîNo ratings yet
- PHD Thesis - Alfonso Palazzo 2015Document444 pagesPHD Thesis - Alfonso Palazzo 2015johanNo ratings yet
- DQ1A SolutionDocument2 pagesDQ1A SolutionmeepmeeNo ratings yet
- Fundamentals of Noise and Vibration Analysis For Engineers: Second EditionDocument9 pagesFundamentals of Noise and Vibration Analysis For Engineers: Second EditionjeyaselvanNo ratings yet
- BC Series 7 - 04-05-10Document39 pagesBC Series 7 - 04-05-10Krista TranNo ratings yet
- Position Control of AC Servomotor Using Internal Model Control StrategyDocument5 pagesPosition Control of AC Servomotor Using Internal Model Control Strategyhossein mohajeryNo ratings yet
- Physics ActivityDocument45 pagesPhysics ActivityHarsh boxNo ratings yet
- Phase/State Transitions of Confectionery Sweeteners: Thermodynamic and Kinetic AspectsDocument16 pagesPhase/State Transitions of Confectionery Sweeteners: Thermodynamic and Kinetic AspectsAlicia MartinezNo ratings yet
- Atomic Spectroscopy 1Document40 pagesAtomic Spectroscopy 1SOURAV BHATTACHARYANo ratings yet