You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Introduction To Gas Turbines For Non-EngineersDocument9 pagesIntroduction To Gas Turbines For Non-EngineersKrishna MyakalaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Syllabus For Direct Recruitment To The Posts of Assistant/Upper Division Clerk in Level 4 of Pay MatrixDocument1 pageSyllabus For Direct Recruitment To The Posts of Assistant/Upper Division Clerk in Level 4 of Pay MatrixKrishna MyakalaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Gas Turbine ResearchDocument13 pagesGas Turbine ResearchKrishna MyakalaNo ratings yet
- From: Powered byDocument16 pagesFrom: Powered byKrishna MyakalaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Unsung Heroes of India'S Freedom Struggle: Employment NewsDocument40 pagesThe Unsung Heroes of India'S Freedom Struggle: Employment NewsKrishna MyakalaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- CAA - C++ API Documentation Generator (CDG) - 2 PDFDocument3 pagesCAA - C++ API Documentation Generator (CDG) - 2 PDFKrishna MyakalaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Contract Engineer For MMF Division-Advertisement PDFDocument2 pagesContract Engineer For MMF Division-Advertisement PDFKrishna MyakalaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 1101201315rocket ProppellantDocument47 pages1101201315rocket ProppellantKrishna MyakalaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Catia v5 - Questions & AnswersDocument67 pagesCatia v5 - Questions & AnswersKrishna MyakalaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Notification For Selection of Managing Director Chief Executive OfficerDocument7 pagesNotification For Selection of Managing Director Chief Executive OfficerKrishna MyakalaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Scramjet EngineDocument23 pagesScramjet EngineKrishna MyakalaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- To, The Zonal Manager Bank of India Indore ZoneDocument3 pagesTo, The Zonal Manager Bank of India Indore ZoneKrishna MyakalaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Principles of Flight: Chapter 6 - HelicoptersDocument11 pagesPrinciples of Flight: Chapter 6 - HelicoptersKrishna MyakalaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- NHDC Limited: Sl. No Designation / Grade / Pay Scale MinimumqualificationDocument6 pagesNHDC Limited: Sl. No Designation / Grade / Pay Scale MinimumqualificationKrishna MyakalaNo ratings yet
- ApacheDocument18 pagesApacheKrishna Myakala100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- I. Important Instructions 1. Ragging in Any Form Is Strictly ProhibitedDocument32 pagesI. Important Instructions 1. Ragging in Any Form Is Strictly ProhibitedKrishna Myakala100% (2)
- Helicopters: David Clay Richard CodyDocument19 pagesHelicopters: David Clay Richard CodyKrishna MyakalaNo ratings yet
- Aircraft StructuresDocument39 pagesAircraft StructuresKrishna Myakala75% (4)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Rocket Anatomy: - Components and Parts - Configuration / ArrangementDocument17 pagesRocket Anatomy: - Components and Parts - Configuration / ArrangementKrishna MyakalaNo ratings yet
- 2Document2 pages2Krishna MyakalaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- (Ebook Science - PDF) Nikola Tesla Electric Car Part-1Document15 pages(Ebook Science - PDF) Nikola Tesla Electric Car Part-1Michael DangeloNo ratings yet
- Why Rolls-Royce Cars Are So Expensive - So ExpensiveDocument9 pagesWhy Rolls-Royce Cars Are So Expensive - So ExpensiveAadesh kumar Soni nayakNo ratings yet
- Skills Training Opportunities Short Intensive Courses For April 2019Document1 pageSkills Training Opportunities Short Intensive Courses For April 2019Kalimbwe TutaNo ratings yet
- Short Titles Long TitlesDocument2 pagesShort Titles Long TitlesTomyNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- (2022 09) Changes in CatalogueDocument4 pages(2022 09) Changes in CatalogueamitNo ratings yet
- VGS Control Unit, Component DescriptionDocument4 pagesVGS Control Unit, Component DescriptionAqidi MohammadNo ratings yet
- Saab US 9-3 Griffin 2012Document13 pagesSaab US 9-3 Griffin 2012MioMaulenovoNo ratings yet
- JFF..H, .R) : B.'FT-F ......................Document1 pageJFF..H, .R) : B.'FT-F ......................rehanNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- PC - Training Manual - Pt-2Document47 pagesPC - Training Manual - Pt-2Josef JoestarNo ratings yet
- Aeroprakt LTD.: Aeroprakt-22L Illustrated Parts Catalog A22L-IPC-01Document33 pagesAeroprakt LTD.: Aeroprakt-22L Illustrated Parts Catalog A22L-IPC-01Facundo ArlistanNo ratings yet
- 2013 Pb-Eng-M-L126tih - 950106-01210Document428 pages2013 Pb-Eng-M-L126tih - 950106-01210Cristian Sepulveda100% (4)
- Frederick Flight Center, Inc.: Procedures Guide Trinidad Tb20Document6 pagesFrederick Flight Center, Inc.: Procedures Guide Trinidad Tb20kmecholsNo ratings yet
- CAT Engine Driving TipsDocument2 pagesCAT Engine Driving Tipsjinxy5779No ratings yet
- FourStroke 40 60 HP Mercury Marine Network Yacht BrokersDocument5 pagesFourStroke 40 60 HP Mercury Marine Network Yacht BrokersDragan Melita CebicNo ratings yet
- On-Highway PowerDocument2 pagesOn-Highway PowerRamonNo ratings yet
- Strategic Management by Ford Motor CompanyDocument12 pagesStrategic Management by Ford Motor CompanyAbdul Hakim75% (4)
- Spec Sheet Dt2h-Nl Uk c133437Document2 pagesSpec Sheet Dt2h-Nl Uk c133437Hermantoro W. PradanaNo ratings yet
- 6-Speed Synchromesh Transmission For Small Trucks: ZF-Ecolite (Truck)Document2 pages6-Speed Synchromesh Transmission For Small Trucks: ZF-Ecolite (Truck)eng_pontinNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Volvo 7900 Euro6 Hybrid Brochure enDocument13 pagesVolvo 7900 Euro6 Hybrid Brochure enVladimir PopovićNo ratings yet
- Caterpillar Parts Book PDFDocument24 pagesCaterpillar Parts Book PDFB.HNo ratings yet
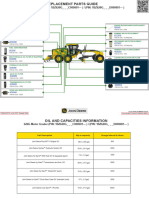
- 620G Motor Grader (PIN - 1BZ620G - C000001-) (PIN - 1BZ620G - D000001-) Replacement Parts GuideDocument5 pages620G Motor Grader (PIN - 1BZ620G - C000001-) (PIN - 1BZ620G - D000001-) Replacement Parts GuideFagner Pires de SáNo ratings yet
- Teikin Catalog Vol 15-Automobile MAZDADocument21 pagesTeikin Catalog Vol 15-Automobile MAZDAВалерий Герасимов0% (1)
- AEROSTAR General Presentation 2013 PDFDocument33 pagesAEROSTAR General Presentation 2013 PDFElenaIonitaNo ratings yet
- Model Car Builder 1Document40 pagesModel Car Builder 1naruemon khongmiNo ratings yet
- Vectrix VX-2 Service Manual 2011Document78 pagesVectrix VX-2 Service Manual 2011João Leonardo da Silva NascimentoNo ratings yet
- 2019 Huskvarna FE 450 ManualDocument162 pages2019 Huskvarna FE 450 ManualrodizianoNo ratings yet
- YEC BrochureDocument12 pagesYEC BrochureRobCollinsNo ratings yet
- 333G Compact Track Loader PIN 1T0333G F387881 Replacement Parts GuideDocument3 pages333G Compact Track Loader PIN 1T0333G F387881 Replacement Parts GuideNelson Andrade VelasquezNo ratings yet
- 2JZGTE VVTI InformationDocument25 pages2JZGTE VVTI Informationjonb42100% (1)