You might also like
- Introduction to Digital Control SystemsDocument70 pagesIntroduction to Digital Control SystemsAmruth Thelkar67% (3)
- Lecture 1: Digital Control SystemsDocument57 pagesLecture 1: Digital Control SystemsMeer Zafarullah NoohaniNo ratings yet
- Compensation in Control SystemDocument10 pagesCompensation in Control Systemshouvikchaudhuri0% (1)
- 92402Document34 pages92402anon_1937750530% (1)
- Estimate ARX model parametersDocument14 pagesEstimate ARX model parametersJoãoEdgarNo ratings yet
- Sta Notes 1671631469 PDFDocument47 pagesSta Notes 1671631469 PDFAathith SaiprasadNo ratings yet
- QUBE-Servo DC Motor ModelingDocument5 pagesQUBE-Servo DC Motor Modelingandres guerreroNo ratings yet
- Chapter 10 PID ControlsDocument35 pagesChapter 10 PID ControlsRiski SepTiadi RasyaNo ratings yet
- Total NotesDocument442 pagesTotal NotesArmando MaloneNo ratings yet
- Control System Question BankDocument3 pagesControl System Question Bankmanish_iitrNo ratings yet
- Synergetic ControlDocument13 pagesSynergetic Controlrostamkola1229No ratings yet
- Bode PlotDocument7 pagesBode Plotnabilo20No ratings yet
- Control System NotesDocument199 pagesControl System NotesCarson R. Dick100% (2)
- Model Reference Adaptive Control (MRAC) Theory and ApplicationDocument22 pagesModel Reference Adaptive Control (MRAC) Theory and Applicationasusd112550% (4)
- Modelling Discrete Time SystemsDocument6 pagesModelling Discrete Time SystemsSandeep KumarNo ratings yet
- Advanced State Observer DesignDocument11 pagesAdvanced State Observer DesignNileshNo ratings yet
- Advanced Topics in Digital Signal ProcessingDocument23 pagesAdvanced Topics in Digital Signal ProcessingJadur RahmanNo ratings yet
- Commande Matlab LMIDocument20 pagesCommande Matlab LMIibovNo ratings yet
- MIT 6.341 Lecture 20 - The Goertzel Algorithm and Chirp TransformDocument4 pagesMIT 6.341 Lecture 20 - The Goertzel Algorithm and Chirp Transformc_mc2No ratings yet
- ECE 402 Controls Lab Gain Compensation LabDocument9 pagesECE 402 Controls Lab Gain Compensation LabJin Sung AhnNo ratings yet
- Lab 4 QUBE-Servo Bump Test Modeling Workbook (Student)Document6 pagesLab 4 QUBE-Servo Bump Test Modeling Workbook (Student)Luis EnriquezNo ratings yet
- MCT Unit 2 State Space DesignDocument92 pagesMCT Unit 2 State Space DesignHarshal Giri100% (1)
- Chapter 1Document49 pagesChapter 1api-3733590No ratings yet
- Numerical Sheet Control SystemsDocument20 pagesNumerical Sheet Control SystemsKAMARAJU SAI VAMSHINo ratings yet
- Ee 693 Lab Manual Final Control System 2Document42 pagesEe 693 Lab Manual Final Control System 2KumarNo ratings yet
- Experiment No. 13 Open Ended Lab Inverted Pendulum Using State-Space MethodDocument5 pagesExperiment No. 13 Open Ended Lab Inverted Pendulum Using State-Space MethodSH NoorNo ratings yet
- Signal and Systems Lab Manual PDFDocument78 pagesSignal and Systems Lab Manual PDFMuhammad SaadNo ratings yet
- Inverted PendulumDocument4 pagesInverted PendulumFerbNo ratings yet
- Z-transform Guide to Signals & SystemsDocument72 pagesZ-transform Guide to Signals & SystemsIndomi doubleNo ratings yet
- Digital Signal Processing QuestionsDocument2 pagesDigital Signal Processing QuestionsTalha HabibNo ratings yet
- Fir Filter DesignDocument94 pagesFir Filter Designarjun cat0% (1)
- Tutorial 2Document2 pagesTutorial 2kenny5shinNo ratings yet
- PIC To PIC Communication Using UARTDocument9 pagesPIC To PIC Communication Using UARTUma Shankar100% (1)
- Solution Control System Engineering Nagrath GopalDocument2 pagesSolution Control System Engineering Nagrath Gopalganesharun123No ratings yet
- IMC Tuned PID Controller Improves DC Motor ControlDocument6 pagesIMC Tuned PID Controller Improves DC Motor ControljayaseelanNo ratings yet
- Lecture Time Domain Analysis of Control SystemsDocument15 pagesLecture Time Domain Analysis of Control SystemsFahadKhNo ratings yet
- SN 3 What Is Robust ControlDocument24 pagesSN 3 What Is Robust ControlAparna AkhileshNo ratings yet
- Lecture-5 Modeling of Electromechanical SystemsDocument19 pagesLecture-5 Modeling of Electromechanical Systemsusama asifNo ratings yet
- 09-Mathematical Methods in Robust Control PDFDocument319 pages09-Mathematical Methods in Robust Control PDFRui CostaNo ratings yet
- The Design of Digital PID Controllers UsingDocument4 pagesThe Design of Digital PID Controllers UsingArulrajNo ratings yet
- Lag CompensationDocument40 pagesLag CompensationMeer Zafarullah NoohaniNo ratings yet
- ECE461 Motor Lab Experiment5Document13 pagesECE461 Motor Lab Experiment5sameerpatel15770No ratings yet
- Lecture 14 Memory InterfaceDocument19 pagesLecture 14 Memory Interfacenjpar0% (2)
- State Space DesignDocument47 pagesState Space DesigneuticusNo ratings yet
- MATLAB Chapter 1: An Overview of MATLABDocument152 pagesMATLAB Chapter 1: An Overview of MATLABHusseinHazimeNo ratings yet
- Table of Laplace and Z TransformsDocument3 pagesTable of Laplace and Z TransformsfreonxzNo ratings yet
- Sliding Mode Control Strategy For A 6 DOF Quadrotor HelicopterDocument7 pagesSliding Mode Control Strategy For A 6 DOF Quadrotor HelicopternaderjsaNo ratings yet
- Steady State ErrorsDocument41 pagesSteady State ErrorsMuhammad Noman KhanNo ratings yet
- Observer DesignDocument20 pagesObserver DesignRamaDinakaranNo ratings yet
- Lect11 Design Via State SpaceDocument49 pagesLect11 Design Via State SpaceMirza Riyasat AliNo ratings yet
- Modelado Rotary Pendulum Workbook InstructorDocument60 pagesModelado Rotary Pendulum Workbook Instructorsolid34No ratings yet
- Using Matlab Ode45 To Solve Differential EquationsDocument9 pagesUsing Matlab Ode45 To Solve Differential EquationsÁdámKovácsNo ratings yet
- Introduction To Control SystemsDocument28 pagesIntroduction To Control SystemsAK MizanNo ratings yet
- Lecture 12-13 Time Domain Analysis of 1st Order SystemsDocument56 pagesLecture 12-13 Time Domain Analysis of 1st Order SystemsKemal ZhafNo ratings yet
- Gain & Phase Margin - Bode PlotDocument28 pagesGain & Phase Margin - Bode PlotDeepthiNo ratings yet
- Bangladesh University of Professionals Department of Information and Communication Technology Course No.: Communication Theory Laboratory (ICT 2208)Document2 pagesBangladesh University of Professionals Department of Information and Communication Technology Course No.: Communication Theory Laboratory (ICT 2208)Sadia AfreenNo ratings yet
- Matlab Code For Basic DSP Signals MATLAB PROGRAM TO DISPLAY THE PROPERTIES OF DISCRETE FOURIER TRANSFORM (DFT)Document16 pagesMatlab Code For Basic DSP Signals MATLAB PROGRAM TO DISPLAY THE PROPERTIES OF DISCRETE FOURIER TRANSFORM (DFT)Sabithkk2007No ratings yet
- Numerical Solution of Ordinary and Partial Differential Equations: Based on a Summer School Held in Oxford, August-September 1961From EverandNumerical Solution of Ordinary and Partial Differential Equations: Based on a Summer School Held in Oxford, August-September 1961No ratings yet
- UNIT 5 Session 6Document67 pagesUNIT 5 Session 6rocklinetoNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Alan Couzens - The Principle of IndividualityDocument5 pagesAlan Couzens - The Principle of IndividualityRonald GeorgeNo ratings yet
- Effectivetempchart PDFDocument1 pageEffectivetempchart PDFRonald GeorgeNo ratings yet
- Wingate Anaerobic Test Peak Power and Anaerobic - in Collegiate AthletesDocument7 pagesWingate Anaerobic Test Peak Power and Anaerobic - in Collegiate AthletesRonald GeorgeNo ratings yet
- Athletic Training Lydiard (Best)Document45 pagesAthletic Training Lydiard (Best)Ronald George100% (2)
- 4x100 Relay StrategiesDocument13 pages4x100 Relay Strategiesapi-313469173No ratings yet
- Diagnostics of Anaerobic Power and Capacity: Hermann Heck, Henry Schulz, and Ulrich BartmusDocument23 pagesDiagnostics of Anaerobic Power and Capacity: Hermann Heck, Henry Schulz, and Ulrich BartmusRonald GeorgeNo ratings yet
- The Peronnet - Thibault Mathematical Model Applied To The Record Power Profile in CyclingDocument2 pagesThe Peronnet - Thibault Mathematical Model Applied To The Record Power Profile in CyclingRonald GeorgeNo ratings yet
- 800778-3.0.0 Emotion Faros Series Manual PDFDocument52 pages800778-3.0.0 Emotion Faros Series Manual PDFRonald GeorgeNo ratings yet
- Critical Power: An Important Fatigue Threshold in Exercise PhysiologyDocument17 pagesCritical Power: An Important Fatigue Threshold in Exercise PhysiologyRonald GeorgeNo ratings yet
- Abu Dhabi Seniors March 21stDocument1 pageAbu Dhabi Seniors March 21stRonald GeorgeNo ratings yet
- Billat-Concept of MLSSDocument21 pagesBillat-Concept of MLSSRonald GeorgeNo ratings yet
- 5K Training Plan Based On VDOTDocument1 page5K Training Plan Based On VDOTRonald GeorgeNo ratings yet
- The Oil Learning PathDocument1 pageThe Oil Learning PathRonald GeorgeNo ratings yet
- Walk Run EffDocument1 pageWalk Run EffRonald GeorgeNo ratings yet
- 2012autumn PDFDocument40 pages2012autumn PDFRonald GeorgeNo ratings yet
- Training and Racing With A Power Meter For Triathlon 1 PDFDocument11 pagesTraining and Racing With A Power Meter For Triathlon 1 PDFRonald GeorgeNo ratings yet
- Calculating Work and Power by Climbing StairsDocument2 pagesCalculating Work and Power by Climbing StairsPiyush Singh RajputNo ratings yet
- Campus Stadiumparking InstructionsDocument7 pagesCampus Stadiumparking InstructionsRonald GeorgeNo ratings yet
- Accuracy of SRM and Powertap PDFDocument7 pagesAccuracy of SRM and Powertap PDFRonald GeorgeNo ratings yet
- Interpreting The Powercenter Heat MapDocument6 pagesInterpreting The Powercenter Heat MapRonald GeorgeNo ratings yet
- White PaperDocument1 pageWhite PaperRonald GeorgeNo ratings yet
- Intensity During Time TrialsDocument7 pagesIntensity During Time TrialsRonald GeorgeNo ratings yet
- Distribucion de PotenciaDocument21 pagesDistribucion de PotenciaCristianLopezNo ratings yet
- Ironman Pacing Strategy PDFDocument9 pagesIronman Pacing Strategy PDFRonald GeorgeNo ratings yet
- Bottom Bracket Standards - SlowtwitchDocument7 pagesBottom Bracket Standards - SlowtwitchRonald GeorgeNo ratings yet
- Closing Plenary CompleteDocument45 pagesClosing Plenary CompleteRonald GeorgeNo ratings yet
- Power Duration Relationship Physiology Fatigue and The Limits of Human PerformanceDocument13 pagesPower Duration Relationship Physiology Fatigue and The Limits of Human PerformanceRonald GeorgeNo ratings yet
- Focus: Methodology For Estimating Greenhouse Gas and Air Pollutant Emissions Related To Road NetworksDocument4 pagesFocus: Methodology For Estimating Greenhouse Gas and Air Pollutant Emissions Related To Road NetworksRonald GeorgeNo ratings yet
- PaperDocument8 pagesPaperRonald GeorgeNo ratings yet
- PM10 Salute 2013 DDocument10 pagesPM10 Salute 2013 DRonald GeorgeNo ratings yet
- ETI-Chapter 2Document13 pagesETI-Chapter 2kenny jenNo ratings yet
- Wersi CD 600Document98 pagesWersi CD 600Mark WillisNo ratings yet
- DLD - Chapter 01 Fall23Document34 pagesDLD - Chapter 01 Fall23MUSKAN AMEER UD DINNo ratings yet
- Eetop - CN Adv Verif Topics Book TOCDocument6 pagesEetop - CN Adv Verif Topics Book TOCSam HoneyNo ratings yet
- STM32F0xxx Reference ManualDocument1,004 pagesSTM32F0xxx Reference ManualVishal PanchalNo ratings yet
- Vibration Testing Controller: The Innovator in Sound and Vibration TechnologyDocument24 pagesVibration Testing Controller: The Innovator in Sound and Vibration TechnologyAnonymous OFwyjaMyNo ratings yet
- Performance Analysis of DCO-OfDM in VLC SystemDocument6 pagesPerformance Analysis of DCO-OfDM in VLC SystemayadmanNo ratings yet
- Analog Reinvented: High Performance USB DAC With Headphone Amplifier, MQA, ADC, PLL, Jack Detect, Mic, and A/D MixingDocument3 pagesAnalog Reinvented: High Performance USB DAC With Headphone Amplifier, MQA, ADC, PLL, Jack Detect, Mic, and A/D MixingCoreyNo ratings yet
- Fiden Tial: Device SpecificationDocument1,011 pagesFiden Tial: Device Specificationolger huancara gasparaNo ratings yet
- L4 EaDocument7 pagesL4 EaIoanaNicoletaNo ratings yet
- Cirrus Logic CS4334 KSZR - C330424Document25 pagesCirrus Logic CS4334 KSZR - C330424CaexvenNo ratings yet
- Vizio Vx37l HDTV Service ManualDocument158 pagesVizio Vx37l HDTV Service Manuallamirada1100% (1)
- Safety Precautions for G7F-ADHB ModuleDocument2 pagesSafety Precautions for G7F-ADHB Moduleatakan kurtcaNo ratings yet
- ALC5610 Datasheet 1.2Document89 pagesALC5610 Datasheet 1.2Aleš VodaNo ratings yet
- GE Krautkramer USN58L BrochureDocument2 pagesGE Krautkramer USN58L BrochureIslamNo ratings yet
- Chapter 5Document42 pagesChapter 5Ram Bahadur KhadkaNo ratings yet
- Analog-to-Digital Conversion Utilizing The AT89CX051 MicrocontrollersDocument6 pagesAnalog-to-Digital Conversion Utilizing The AT89CX051 MicrocontrollersJuan Jose MendozaNo ratings yet
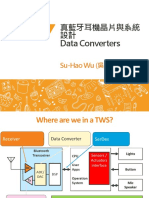
- 真藍牙耳機晶片與系統 設計 Data Converters: Su-Hao Wu (吳書豪)Document48 pages真藍牙耳機晶片與系統 設計 Data Converters: Su-Hao Wu (吳書豪)黃良初100% (1)
- ADCsurveyDocument65 pagesADCsurveyAnand Krishna GhattyNo ratings yet
- Service ManualDocument148 pagesService ManualTazoacha NkemnguNo ratings yet
- Lab 10Document6 pagesLab 10Nouroj AminNo ratings yet
- Lesson Plan ECR 305Document7 pagesLesson Plan ECR 305Shirazim MunirNo ratings yet
- ToP MonitoringDocument52 pagesToP MonitoringEd MulNo ratings yet
- Viewsonic N2060w-1e SMDocument134 pagesViewsonic N2060w-1e SMRocco MicaliNo ratings yet
- Analog To Digital ConverterDocument53 pagesAnalog To Digital ConverterArryshah DahmiaNo ratings yet
- Design and Experimental Evaluation of A Time-Interleaved ADC Calibration Algorithm For Application in High-Speed Communication SystemsDocument12 pagesDesign and Experimental Evaluation of A Time-Interleaved ADC Calibration Algorithm For Application in High-Speed Communication SystemsRahul ShandilyaNo ratings yet
- ADC-DAC Conversion SystemsDocument20 pagesADC-DAC Conversion SystemshandywriterNo ratings yet
- Keysight Fundamentals of Arbitrary Waveform Generation PDFDocument204 pagesKeysight Fundamentals of Arbitrary Waveform Generation PDFPavel SchukinNo ratings yet
- Analog CMOS Circuit Design - Allen & HolbergDocument342 pagesAnalog CMOS Circuit Design - Allen & HolbergClaudio HinojozaNo ratings yet
- Electronics Hardware Focus for Mechatronics SystemsDocument18 pagesElectronics Hardware Focus for Mechatronics SystemsMaha SaeedNo ratings yet