You might also like
- Chapter 9 ChangDocument37 pagesChapter 9 Changsatya sagarNo ratings yet
- Steel - Incomplete PenetrationDocument32 pagesSteel - Incomplete PenetrationAhora Con Todo PepitoNo ratings yet
- Controller PrincipleDocument24 pagesController PrinciplePortia ShilengeNo ratings yet
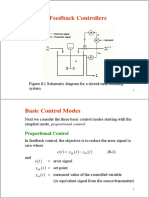
- Feedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemDocument24 pagesFeedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemRama ChilpuriNo ratings yet
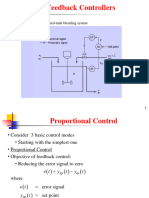
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument18 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending Systeml7aniNo ratings yet
- Chapter 8Document31 pagesChapter 8fosterNo ratings yet
- Process Dynamics and Control: Chapter 8 LecturesDocument33 pagesProcess Dynamics and Control: Chapter 8 LecturesMuhaiminul IslamNo ratings yet
- Feedback Controllers: Proportional ControlDocument14 pagesFeedback Controllers: Proportional Control李承家No ratings yet
- Chapter 8 - Feedback ControllerDocument35 pagesChapter 8 - Feedback ControllerFakhrulShahrilEzanieNo ratings yet
- ControllersDocument32 pagesControllersEric KamauNo ratings yet
- Introduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDocument32 pagesIntroduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwandaswkNo ratings yet
- ERT 321 Process Control & Dynamics: Feedback ControllersDocument34 pagesERT 321 Process Control & Dynamics: Feedback Controllershakita86No ratings yet
- Week 9Document21 pagesWeek 9candan.erkenNo ratings yet
- Chapter 7 - Feedback ControllersDocument44 pagesChapter 7 - Feedback ControllersPravin Nair50% (2)
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument42 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemJoy RoyNo ratings yet
- PID ControlDocument56 pagesPID ControlSyafRizal100% (1)
- Control SystemDocument48 pagesControl SystemOlawale John AdeotiNo ratings yet
- InTech-Pid Control TheoryDocument17 pagesInTech-Pid Control TheoryAbner BezerraNo ratings yet
- PID Control TheoryDocument17 pagesPID Control TheoryManuel Santos MNo ratings yet
- Pid Control ch8 PDFDocument22 pagesPid Control ch8 PDFGholamreza IlkhaniNo ratings yet
- Starting: Chapter 7: PID ControlDocument13 pagesStarting: Chapter 7: PID ControlKishodarran Rajendran KicchoNo ratings yet
- 4 Transfer FunctionDocument22 pages4 Transfer FunctionSalihin FhooziNo ratings yet
- Finn Haugen. Telemark University College National Instruments ConfidentialDocument27 pagesFinn Haugen. Telemark University College National Instruments ConfidentialtriplbingaziNo ratings yet
- Controller DesignDocument253 pagesController DesignymvbnNo ratings yet
- Week 10-Feedback ControlDocument34 pagesWeek 10-Feedback ControlMohd Aizad100% (1)
- Week 2Document13 pagesWeek 2Abdinasir AliNo ratings yet
- L-14 (SS) (Iac) ( (Ee) Nptel)Document10 pagesL-14 (SS) (Iac) ( (Ee) Nptel)Marvin BayanayNo ratings yet
- Pid Controller: Ashok.S 500017496 M.Tech Pde R670211016Document40 pagesPid Controller: Ashok.S 500017496 M.Tech Pde R670211016Ashik Jacob Oommen100% (1)
- Chapter 8Document35 pagesChapter 8satishNo ratings yet
- Proportional-Integral-Derivative (PID) Control: Velocity ResponseDocument34 pagesProportional-Integral-Derivative (PID) Control: Velocity ResponseFadi AlbatshNo ratings yet
- PID Control Tuning Methods and Intro To NonlinearDocument36 pagesPID Control Tuning Methods and Intro To NonlinearKuanysh YessenzhanovNo ratings yet
- Plant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorDocument39 pagesPlant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorMani Kumar ReddyNo ratings yet
- Week 12 - Control SystemDocument30 pagesWeek 12 - Control SystemAzizan Anuar100% (1)
- Control System-Ii Lab File: Bachelor of Engineering (Division of Instrumentation & ControlDocument41 pagesControl System-Ii Lab File: Bachelor of Engineering (Division of Instrumentation & ControlParas SinghNo ratings yet
- Chap 08 Marlin 2002Document37 pagesChap 08 Marlin 2002Audrey Patrick KallaNo ratings yet
- Application Note AN2208: Universal PID-ThermoregulatorDocument17 pagesApplication Note AN2208: Universal PID-ThermoregulatorJ Daniel PichardoNo ratings yet
- Feedback Controller: Proportional, Integral, Derivative (PID)Document34 pagesFeedback Controller: Proportional, Integral, Derivative (PID)Ereen100% (1)
- P, I, D, PI, PD, and PID ControlDocument14 pagesP, I, D, PI, PD, and PID ControlArnav KothiyalNo ratings yet
- Experiment 10Document2 pagesExperiment 10kalidindi chandrasekharNo ratings yet
- DR20Document136 pagesDR20Daryl Asto MercadoNo ratings yet
- Control StrategyDocument44 pagesControl StrategyAyunie FazlinNo ratings yet
- Task2 1 Specific Training-EnDocument35 pagesTask2 1 Specific Training-EnSantiago LarrazNo ratings yet
- Zieglar Nichols MethodDocument7 pagesZieglar Nichols MethodVinay RajeshNo ratings yet
- EE 322 Control TheoryDocument37 pagesEE 322 Control TheoryshrnbolonneNo ratings yet
- Presentation For ControllerDocument42 pagesPresentation For ControllerAlakshendra JohariNo ratings yet
- EE448 Lec3 ControlTechniques 2014Document25 pagesEE448 Lec3 ControlTechniques 2014scotgunnerNo ratings yet
- Lab 7 Pid ControlDocument6 pagesLab 7 Pid ControlFatin FarehahNo ratings yet
- Priprema Za Ispit 2Document8 pagesPriprema Za Ispit 2Aleksandar MicicNo ratings yet
- 20 THDocument28 pages20 THujjwal kumarNo ratings yet
- 5 Controlled Rectifier DC Drives-Closed Loop - PpsDocument41 pages5 Controlled Rectifier DC Drives-Closed Loop - PpsRanjan KumarNo ratings yet
- Experiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETDocument18 pagesExperiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETMd Abid AfridiNo ratings yet
- Auto Loops TVNLDocument144 pagesAuto Loops TVNLRajeevAgrawalNo ratings yet
- 9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsDocument9 pages9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsChandrasekar ElankannanNo ratings yet
- Project Based Learning IcsDocument14 pagesProject Based Learning IcsAvinash YadavNo ratings yet
- Pid TuningDocument19 pagesPid TuningAsuh Rifqi Prihandana100% (1)
- Feedback Controller TuningDocument23 pagesFeedback Controller Tuningso cool100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDocument53 pagesControl System Design Based On Frequency Response Analysis: Closed-Loop Behaviorsatya sagarNo ratings yet
- Controller Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID ControllersDocument66 pagesController Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID Controllerssatya sagarNo ratings yet
- Chapter 11 Chang.2Document39 pagesChapter 11 Chang.2satya sagarNo ratings yet
- Chapter 11 Chang.1Document34 pagesChapter 11 Chang.1satya sagarNo ratings yet
- Development of Empirical Dynamic Models From Step Response DataDocument23 pagesDevelopment of Empirical Dynamic Models From Step Response Datasatya sagarNo ratings yet
- Data FTP PLC FBs Manual Manual 1 Hardware Chapter 2 PDFDocument3 pagesData FTP PLC FBs Manual Manual 1 Hardware Chapter 2 PDFsajjad aliNo ratings yet
- Validacion VOACAP MilDocument40 pagesValidacion VOACAP MilNestor Alberto EscalaNo ratings yet
- Transition To F90Document17 pagesTransition To F90Gowtham ReddyNo ratings yet
- CH 07Document12 pagesCH 07Imam AwaluddinNo ratings yet
- Acceleration of A Laboratory CartDocument3 pagesAcceleration of A Laboratory CartUgur ASİT100% (1)
- Skyblivion Architecture TestDocument6 pagesSkyblivion Architecture TestBrody EvensonNo ratings yet
- Programacion para Robot ZumoDocument3 pagesProgramacion para Robot Zumoandres angel salinasNo ratings yet
- KTMED MVSA Angelus Vital Signs MonitorDocument48 pagesKTMED MVSA Angelus Vital Signs MonitorbbaboomNo ratings yet
- SDTDocument18 pagesSDTAyushNo ratings yet
- Release NotesDocument405 pagesRelease NotesAbhishek VermaNo ratings yet
- Dommel Tinney OpfDocument11 pagesDommel Tinney OpffpttmmNo ratings yet
- Socks4 ProxiesDocument19 pagesSocks4 ProxiesAndrei GalavanNo ratings yet
- CFX Tutorial For FOrtran InstallationsDocument41 pagesCFX Tutorial For FOrtran Installationsshahid nadeemNo ratings yet
- CG ReportDocument32 pagesCG ReportSunny KushalNo ratings yet
- 02 Awareness of Information Security For New Employee)Document30 pages02 Awareness of Information Security For New Employee)Yens ContrerasNo ratings yet
- Rich Appearance Maker - Quick Start GuideDocument10 pagesRich Appearance Maker - Quick Start GuideinomissNo ratings yet
- Common MisconceptionsDocument1 pageCommon Misconceptionslet's skip thisNo ratings yet
- Statistical Implicative Analysis - Theory and Applications PDFDocument511 pagesStatistical Implicative Analysis - Theory and Applications PDFhoangntdtNo ratings yet
- Unit 6 - Module-3 (Week-3) : Assignment 3Document6 pagesUnit 6 - Module-3 (Week-3) : Assignment 3Rohit DuttaNo ratings yet
- FIBER TENDER SpecificationDocument124 pagesFIBER TENDER SpecificationSardar Ali ShaikNo ratings yet
- NR 238 Data Exchange On The CAN Bus IDocument32 pagesNR 238 Data Exchange On The CAN Bus IJohnny0907100% (1)
- Oki User Manual c822Document143 pagesOki User Manual c822jerrywhitmarshNo ratings yet
- Algorithms and FlowchartsDocument78 pagesAlgorithms and FlowchartsAsfia Asif50% (2)
- Verilog Cheat Sheet: S Winberg and J TaylorDocument2 pagesVerilog Cheat Sheet: S Winberg and J TaylorMohamed ElsahatNo ratings yet
- Mpje Naplex: Registration BulletinDocument29 pagesMpje Naplex: Registration BulletinsujeetjaiswalNo ratings yet
- Que - Special Edition Using Visual FoxPro 6Document488 pagesQue - Special Edition Using Visual FoxPro 6hide1234No ratings yet
- SDK LogDocument903 pagesSDK LogJeet GuptaNo ratings yet
- FT 100010176468Document2 pagesFT 100010176468Luis ToledoNo ratings yet
- Saudi Aviation Mech TrainingDocument82 pagesSaudi Aviation Mech TrainingAnonymous C9ZNFkrb60% (2)
- Mine Hoist Control SystemsDocument14 pagesMine Hoist Control SystemsMarco A. Lara CarocaNo ratings yet