You might also like
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalFrom EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalRating: 5 out of 5 stars5/5 (4)
- Aprendizaje Aplicado a Vehículos Terrestres: Mejora del rendimiento de los vehículos terrestres mediante el aprendizaje por visión por computadoraFrom EverandAprendizaje Aplicado a Vehículos Terrestres: Mejora del rendimiento de los vehículos terrestres mediante el aprendizaje por visión por computadoraNo ratings yet
- Tipos y Características de RobotsDocument32 pagesTipos y Características de RobotsGray Kwon Fullbuster100% (1)
- Robot CilindricoDocument9 pagesRobot CilindricoPame Espejo0% (2)
- Unidad 1Document31 pagesUnidad 1Juan ManuelNo ratings yet
- Capitulo 2 Características DE LOS ROBOTSDocument49 pagesCapitulo 2 Características DE LOS ROBOTSDanny LopezNo ratings yet
- Morfologia de Robots PDFDocument51 pagesMorfologia de Robots PDFDiego LykaiosNo ratings yet
- Tema 2 MorfologiaDocument58 pagesTema 2 Morfologiajuan caballeroNo ratings yet
- Robot CilindricoDocument10 pagesRobot Cilindricohector vela gutierrezNo ratings yet
- Unidad 1Document31 pagesUnidad 1José Manuel MoaNo ratings yet
- Practica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionDocument19 pagesPractica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionAlex Guamán EspinozaNo ratings yet
- Clasificación de Los Robots Por Su GeometríaDocument34 pagesClasificación de Los Robots Por Su GeometríaANA NATHALIE GONZÁLEZ MENA100% (1)
- Manipulador Serial CilindricoDocument6 pagesManipulador Serial CilindricoCinthia RosasNo ratings yet
- Taller de Simulacion y Programación de Robots IndustrialesDocument38 pagesTaller de Simulacion y Programación de Robots IndustrialesnessssaNo ratings yet
- Introducción A La RobóticaDocument32 pagesIntroducción A La Robóticamrtaz007No ratings yet
- Fase 3 - Realizar Lluvia de IdeasDocument9 pagesFase 3 - Realizar Lluvia de Ideasrobert santiago collazos bonillaNo ratings yet
- Tema 01b Morfología Del Robot ManipuladorDocument21 pagesTema 01b Morfología Del Robot Manipuladordalton yañezNo ratings yet
- 01 - Introducción A La RobóticaDocument14 pages01 - Introducción A La RobóticaYumi OshinNo ratings yet
- 6.efecto Final Robotica Patrick RomayDocument11 pages6.efecto Final Robotica Patrick RomayCesar Omar Fierro AguilarNo ratings yet
- Presentacion Cosimir Festo (Español)Document87 pagesPresentacion Cosimir Festo (Español)Rafael Perez Meza100% (1)
- Apuntes de Robótica UD1 Punto 3Document11 pagesApuntes de Robótica UD1 Punto 3Francisco Alfonso Hernandez BravoNo ratings yet
- Motor ServoDocument8 pagesMotor Servonicoliño tremilNo ratings yet
- Configuraciones de Un Robot Industrial3 PDFDocument30 pagesConfiguraciones de Un Robot Industrial3 PDFAgustin Basilio SalinasNo ratings yet
- Caracterìsticas de Los RobotsDocument18 pagesCaracterìsticas de Los RobotsAgustin Basilio SalinasNo ratings yet
- Unidad 1 Morfologia Del RobotDocument33 pagesUnidad 1 Morfologia Del RobotFrancisco Armando Gamboa PinedaNo ratings yet
- Capitulo 3 COMPONENTES DEL ROBOTDocument59 pagesCapitulo 3 COMPONENTES DEL ROBOTDanny LopezNo ratings yet
- Expo Unidad 4Document30 pagesExpo Unidad 4Jacke AngelesNo ratings yet
- Clase #2a Morfología de Robot - Estructura MecánicaDocument46 pagesClase #2a Morfología de Robot - Estructura MecánicaJuanNo ratings yet
- 2 RoboticaIndustrial MorfologiaDocument54 pages2 RoboticaIndustrial MorfologiaJorgeNo ratings yet
- ROBÓTICADocument46 pagesROBÓTICAwalter puma floresNo ratings yet
- Presentacion RoboticaDocument27 pagesPresentacion RoboticaJezzi GLNo ratings yet
- Proyecto - Robot AbbDocument25 pagesProyecto - Robot AbbmiguelthorNo ratings yet
- Proyecto Con CimDocument17 pagesProyecto Con CimCarlos Alejandro Galvez ChicchonNo ratings yet
- ARI Tema 2 Morfología Del Robot 19-20Document58 pagesARI Tema 2 Morfología Del Robot 19-20Yassin BehdaouiNo ratings yet
- Diapositivas en Powerpoint de La Ua: Robótica: Presenta: Dr. Carlos Juárez ToledoDocument37 pagesDiapositivas en Powerpoint de La Ua: Robótica: Presenta: Dr. Carlos Juárez ToledoAguilera AbrahamNo ratings yet
- Robots ManufacturaDocument29 pagesRobots ManufacturaFlaviaLamNo ratings yet
- Primera SustentacionDocument26 pagesPrimera SustentacionLuis Angel Bonza PeñaNo ratings yet
- Capitulo 9Document27 pagesCapitulo 9zakty_182No ratings yet
- Configuraciones de Los RobotsDocument14 pagesConfiguraciones de Los RobotsAmauri MoránNo ratings yet
- Definición y Clasificación de Robots PDFDocument31 pagesDefinición y Clasificación de Robots PDFjuanchoanayaNo ratings yet
- Clasificacion y Estructura MecanicaDocument85 pagesClasificacion y Estructura MecanicaJoel JalezNo ratings yet
- Robot Tipo Polar (Esférico)Document6 pagesRobot Tipo Polar (Esférico)Gray Kwon Fullbuster100% (1)
- Presentación Robot Móvil de Tracción DiferencialDocument25 pagesPresentación Robot Móvil de Tracción DiferencialLeonardo AmayaNo ratings yet
- 232D3/236D3/242D3/ 246D3/262D3: MinicargadoresDocument20 pages232D3/236D3/242D3/ 246D3/262D3: MinicargadoresedilfreddyzNo ratings yet
- Pick Place Solutions Brochure EsDocument20 pagesPick Place Solutions Brochure EsRichard Henry Sanchez CalderonNo ratings yet
- Tema 5 ServomotoresDocument21 pagesTema 5 ServomotoresLin ParejasNo ratings yet
- Brazo RoboticoDocument13 pagesBrazo RoboticosharonNo ratings yet
- AyR Sesión 11bDocument50 pagesAyR Sesión 11bwensantos0701No ratings yet
- Robotica Industrial 2 2014Document49 pagesRobotica Industrial 2 2014Braulio ValdesNo ratings yet
- Informacion Abb Irb 140Document11 pagesInformacion Abb Irb 140Lonmar L. Lentch LopezNo ratings yet
- SR IRB120 SistemaRobotDocument103 pagesSR IRB120 SistemaRobotDavid Herrero100% (2)
- Modelos de Robots en El MercadoDocument4 pagesModelos de Robots en El Mercadocarlos xdxdNo ratings yet
- Introduccion RoboticaDocument106 pagesIntroduccion RoboticaArturo Tapia100% (1)
- Robotica IndustrialDocument41 pagesRobotica IndustrialjozuryNo ratings yet
- Fase 2 - Gabriela Restrepo PáezDocument12 pagesFase 2 - Gabriela Restrepo PáezMiguel Angel Mendigaño ArismendyNo ratings yet
- Introducción Cinemática de RobotsDocument25 pagesIntroducción Cinemática de RobotsgabrielNo ratings yet
- robot móvil: Liberando el potencial visionario de los robots móvilesFrom Everandrobot móvil: Liberando el potencial visionario de los robots móvilesNo ratings yet
- Paginas Web Clasificados TopDocument4 pagesPaginas Web Clasificados TopWilliam Pauzhi IdrovoNo ratings yet
- CuestionarioDocument58 pagesCuestionarioWilliam Pauzhi IdrovoNo ratings yet
- Cuadro Sinoptico DeontologicoDocument2 pagesCuadro Sinoptico DeontologicoWilliam Pauzhi IdrovoNo ratings yet
- Cadena de Caracteres (O StringDocument3 pagesCadena de Caracteres (O StringWilliam Pauzhi IdrovoNo ratings yet
- Zeta 050810 ESDocument2 pagesZeta 050810 ESEnrique Hernandez100% (1)
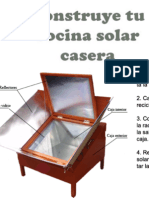
- Cómo Hacer Una Cocina SolarDocument25 pagesCómo Hacer Una Cocina SolarManuales para la Huerta100% (9)
- Area Bajo La Curva 1Document15 pagesArea Bajo La Curva 1Luvin PeñaNo ratings yet
- Densidad Rice 10ADocument6 pagesDensidad Rice 10AVictor OlmedoNo ratings yet
- StewartDocument6 pagesStewartbobesponja24No ratings yet
- Tema 2 Capas de Los PavmentosDocument58 pagesTema 2 Capas de Los PavmentosFranco PMNo ratings yet
- Taller de Recuperación 2do Periodo 11°Document3 pagesTaller de Recuperación 2do Periodo 11°renenazaretNo ratings yet
- Resumen ActuadoresDocument8 pagesResumen ActuadoresSandra PerezNo ratings yet
- Guia 9 Caracteristicas ElectrodosDocument4 pagesGuia 9 Caracteristicas ElectrodosLuisCarlosCanteNo ratings yet
- Diseño de Muro de Concreto ArmadoDocument6 pagesDiseño de Muro de Concreto ArmadoSergio Tineo HuancasNo ratings yet
- EL PÉNDULO y Sus Usos. Venti.Document12 pagesEL PÉNDULO y Sus Usos. Venti.Olga AmarantaNo ratings yet
- 20172SMatDeber5 PDFDocument13 pages20172SMatDeber5 PDFJuan Carlos Garcia EstrellaNo ratings yet
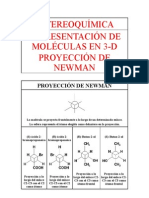
- EstereoquÍmicaDocument18 pagesEstereoquÍmicaanon-410997100% (2)
- NNCC PDFDocument77 pagesNNCC PDFAndresNo ratings yet
- Vectores en El Plano PDFDocument60 pagesVectores en El Plano PDFMaría Alejandra CorchoNo ratings yet
- Coordenadas GeograficasDocument9 pagesCoordenadas Geograficasrodrigo0% (1)
- Tema 4 Vectores en Los Espacios Bi y TriDocument10 pagesTema 4 Vectores en Los Espacios Bi y TriValero JuanNo ratings yet
- Interpolación CircularDocument16 pagesInterpolación CircularHector LoperaNo ratings yet
- Cálculo Integral - Unidad II - Tema 1Document37 pagesCálculo Integral - Unidad II - Tema 1Ivan Morett ValenzuelaNo ratings yet
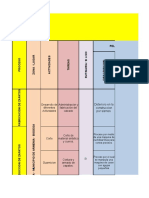
- Matriz Riesgos GT 45Document16 pagesMatriz Riesgos GT 45AlejandroÁngel100% (1)
- Microscopio Primera ParteDocument3 pagesMicroscopio Primera Partejulia roman ori100% (1)
- Examen Final FIMF 2016-2Document6 pagesExamen Final FIMF 2016-2VivianaBautistaNo ratings yet
- Que Es Notación CientíficaDocument21 pagesQue Es Notación CientíficaValentin CalderonNo ratings yet
- Transformaciones de La MateriaDocument14 pagesTransformaciones de La MateriaMarcePulloquingaNo ratings yet
- Aire Acondicionado OptraDocument124 pagesAire Acondicionado OptrawilderNo ratings yet
- Prueba de 7mos Quimica (Autoguardado)Document4 pagesPrueba de 7mos Quimica (Autoguardado)Victoria Alejandra FsmNo ratings yet
- TERMOCOMPRESORDocument6 pagesTERMOCOMPRESORJuan Jimenez HuamaniNo ratings yet
- Catalogo Deformacion de MaterialDocument72 pagesCatalogo Deformacion de MaterialDaniel SolerNo ratings yet
- Reporte de Practica 1 QuímicaDocument15 pagesReporte de Practica 1 QuímicaCamarena EduardoNo ratings yet