You might also like
- 8 2 Angle Bisectors of TrianglesDocument8 pages8 2 Angle Bisectors of Trianglesapi-332361871No ratings yet
- Python Machine LearningDocument70 pagesPython Machine LearningKai RU100% (1)
- Numerical Structural Analysis - O'Hara, Steven (SRG) PDFDocument302 pagesNumerical Structural Analysis - O'Hara, Steven (SRG) PDFggsarne100% (6)
- Deep Learning by Andrew NGDocument100 pagesDeep Learning by Andrew NGSaniya Shaikh100% (1)
- Machine Learning NNDocument16 pagesMachine Learning NNMegha100% (1)
- Methods of Microeconomics: A Simple IntroductionFrom EverandMethods of Microeconomics: A Simple IntroductionRating: 5 out of 5 stars5/5 (2)
- Well Testing and Interpretation For Horizontal WellsDocument6 pagesWell Testing and Interpretation For Horizontal Wellsmiguel_jose123No ratings yet
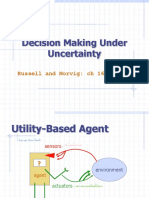
- A16-Simple DecisionsDocument16 pagesA16-Simple DecisionsAbhishek NandaNo ratings yet
- A16 Simple DecisionsDocument16 pagesA16 Simple DecisionsAhmed EllkholyNo ratings yet
- c26 DtheoryDocument19 pagesc26 DtheoryJessie Radaza TutorNo ratings yet
- Business Intelligence & Data Mining-10Document39 pagesBusiness Intelligence & Data Mining-10binzidd007No ratings yet
- Decision MakingDocument63 pagesDecision MakingTariq BezinjoNo ratings yet
- Alg Ch1 Part3Document22 pagesAlg Ch1 Part3yarajehadrabNo ratings yet
- Neural Network PresentationDocument33 pagesNeural Network Presentationhrlive123No ratings yet
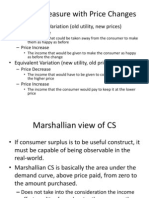
- Welfare Measure With Price Changes: - Compensating Variation (Old Utility, New Prices)Document20 pagesWelfare Measure With Price Changes: - Compensating Variation (Old Utility, New Prices)Bella NovitasariNo ratings yet
- 08 Random Number GenerationDocument28 pages08 Random Number GenerationRupa DnNo ratings yet
- c16 17decision Making 2013Document65 pagesc16 17decision Making 2013กฤตินี วิชัยดิษฐ์No ratings yet
- Independent Component Analysis: Derek BeatonDocument28 pagesIndependent Component Analysis: Derek BeatonGabriel HumpireNo ratings yet
- Linear Imaging Systems Example: The Pinhole Camera: OutlineDocument36 pagesLinear Imaging Systems Example: The Pinhole Camera: OutlinesriNo ratings yet
- A17 ComplexdecisionsDocument28 pagesA17 ComplexdecisionsAbhishek NandaNo ratings yet
- Neural NetworkDocument44 pagesNeural NetworkVishnu ChNo ratings yet
- 02-Linear Regression and Gradient DescentDocument32 pages02-Linear Regression and Gradient DescentKhoa Tran NgocNo ratings yet
- 2014 02 26 KernelsDocument140 pages2014 02 26 KernelsShelly Puspa ArdinaNo ratings yet
- WAP To Implement Artificial Neural NetworkDocument13 pagesWAP To Implement Artificial Neural NetworkInternational Journal of Research and Engineering (IJRE)No ratings yet
- CE 007 (Numerical Solutions To CE Problems)Document14 pagesCE 007 (Numerical Solutions To CE Problems)Michelle Anne SantosNo ratings yet
- Multi-Attribute Utility Theory: Multiple Objectives - An ExampleDocument22 pagesMulti-Attribute Utility Theory: Multiple Objectives - An ExampleSree NivasNo ratings yet
- ANNDocument3 pagesANNmuhammadhamzaansari06No ratings yet
- Guide Function FitDocument11 pagesGuide Function FitJean claude onanaNo ratings yet
- Linear RegressionDocument29 pagesLinear RegressionSreetam GangulyNo ratings yet
- DAA Module 3 Power Point-S.MercyDocument56 pagesDAA Module 3 Power Point-S.MercyIshita SinghalNo ratings yet
- Gradient Maths - Step by Step Delta Rule PDFDocument18 pagesGradient Maths - Step by Step Delta Rule PDFSava JovanovicNo ratings yet
- Window2vp Lec 8up PDFDocument2 pagesWindow2vp Lec 8up PDFGenaro MéndezNo ratings yet
- DL Assignment 1Document3 pagesDL Assignment 1SrinathNo ratings yet
- Facility Location and Decision TreeDocument17 pagesFacility Location and Decision TreekunwarNo ratings yet
- Computer Graphics Lab ManualDocument114 pagesComputer Graphics Lab ManualKhushbu MauryaNo ratings yet
- MIT6 094IAP10 Lec03Document40 pagesMIT6 094IAP10 Lec03skh_1987No ratings yet
- GM PDFDocument11 pagesGM PDFashe mergaNo ratings yet
- Assignment On Matrix FactorizationDocument3 pagesAssignment On Matrix FactorizationRezwan AhmedNo ratings yet
- Sc0x w3l2 CleanDocument31 pagesSc0x w3l2 CleanHaseeb RehmanNo ratings yet
- Extended Q-Learning: Reinforcement Learning Using Self-Organized State SpaceDocument10 pagesExtended Q-Learning: Reinforcement Learning Using Self-Organized State SpaceDanelysNo ratings yet
- Reconfigurational ComputingDocument18 pagesReconfigurational ComputingArpit GoyalNo ratings yet
- IT6501 Notes RejinpaulDocument109 pagesIT6501 Notes RejinpaulSuraj KumarNo ratings yet
- Alu WorksheetDocument6 pagesAlu WorksheetLucas MezaliraNo ratings yet
- Types of Machine Learning: Supervised Learning: The Computer Is Presented With Example Inputs and TheirDocument50 pagesTypes of Machine Learning: Supervised Learning: The Computer Is Presented With Example Inputs and TheirJayesh GadewarNo ratings yet
- 8.0 Additional ConsiderationsDocument35 pages8.0 Additional ConsiderationsRakshay PawarNo ratings yet
- PRu 4Document13 pagesPRu 4Yash ShahNo ratings yet
- Lecture 2 MathDocument34 pagesLecture 2 Mathnikola001No ratings yet
- Neural Networks Give A Warm Start To Linear Optimization ProblemsDocument6 pagesNeural Networks Give A Warm Start To Linear Optimization ProblemsAhmed HussainNo ratings yet
- SSJ User's Guide Package Functions Functions UtilitiesDocument18 pagesSSJ User's Guide Package Functions Functions UtilitiesJean claude onanaNo ratings yet
- Computer Graphics Lab ManualDocument107 pagesComputer Graphics Lab ManualFemilaGoldy79% (14)
- R Functions: Things Your Mother (Probably) Didn't Tell You AboutDocument34 pagesR Functions: Things Your Mother (Probably) Didn't Tell You AboutTeresa CarterNo ratings yet
- Vorlesung02 Statistical Models in SimulationDocument42 pagesVorlesung02 Statistical Models in SimulationkelazindagikaNo ratings yet
- Computer Graphics - TutorialspointDocument66 pagesComputer Graphics - TutorialspointLet’s Talk TechNo ratings yet
- Reinforcement Learning Control of Robot Manipulators in Uncertain EnvironmentsDocument6 pagesReinforcement Learning Control of Robot Manipulators in Uncertain EnvironmentsVehid TavakolNo ratings yet
- Face Recognition PACDocument24 pagesFace Recognition PACpoi.tamrakarNo ratings yet
- 0905 Cs 161183 VishalDocument38 pages0905 Cs 161183 VishalVishal JainNo ratings yet
- Markov Decision Processes: Stochastic, Sequential EnvironmentsDocument20 pagesMarkov Decision Processes: Stochastic, Sequential Environmentsmikey61No ratings yet
- Introduction To Deep LearningDocument48 pagesIntroduction To Deep LearningEshan JainNo ratings yet
- Computer Graphics: (MC - 318) (Lab File)Document59 pagesComputer Graphics: (MC - 318) (Lab File)Vaibhav VermaNo ratings yet
- Demand & Utility: David LevinsonDocument62 pagesDemand & Utility: David LevinsonFrancisco GranadosNo ratings yet
- Chapter Three: Random Variant Generation Random NumbersDocument9 pagesChapter Three: Random Variant Generation Random NumbershaiminalNo ratings yet
- wph11 01 Pef 20230302Document22 pageswph11 01 Pef 20230302Nirmani RodrigoNo ratings yet
- Veritas Prep Errata PDFDocument69 pagesVeritas Prep Errata PDFManish jaiswalNo ratings yet
- Asm1 Programming 1st Nguyenthiminhnguyet Bh00468Document38 pagesAsm1 Programming 1st Nguyenthiminhnguyet Bh00468Nguyệt MinhNo ratings yet
- Programming MCQsDocument7 pagesProgramming MCQsAashish mauryaNo ratings yet
- FOC Lab ManualDocument114 pagesFOC Lab Manualsivadba345No ratings yet
- Quant WS Oct 4Document2 pagesQuant WS Oct 4Time DehradunNo ratings yet
- EPEDocument5 pagesEPEZyne Mohd JohariNo ratings yet
- Motoman ManualDocument16 pagesMotoman ManualvalentincaciorNo ratings yet
- Other Immediate InferenceDocument14 pagesOther Immediate Inferencehimanshulohar79No ratings yet
- Data-Driven Discovery of Koopman Eigenfunctions For Control: Eurika Kaiser, J. Nathan Kutz, and Steven L. BruntonDocument36 pagesData-Driven Discovery of Koopman Eigenfunctions For Control: Eurika Kaiser, J. Nathan Kutz, and Steven L. BruntonIlyasNo ratings yet
- Multiplying DecimalsDocument2 pagesMultiplying Decimalsapi-233663523No ratings yet
- Cost Volume Profit AnalysisDocument29 pagesCost Volume Profit AnalysischaluvadiinNo ratings yet
- Waqas Educational Academy Larkana Basic Maths Test Class: 9, 10, 11Document2 pagesWaqas Educational Academy Larkana Basic Maths Test Class: 9, 10, 11Mansoor Ali LaghariNo ratings yet
- Pipeline ProjectDocument7 pagesPipeline Projectapi-317217482No ratings yet
- Articulo CientificoDocument8 pagesArticulo CientificoJuan Carlos Rodríguez RufinoNo ratings yet
- RSA (Cryptosystem) : 1 HistoryDocument9 pagesRSA (Cryptosystem) : 1 HistoryTanmay RajNo ratings yet
- Seismic Design of Pile Foundations - Structural and Geotechnical IDocument26 pagesSeismic Design of Pile Foundations - Structural and Geotechnical Ihabibur Rahman KhanNo ratings yet
- Parametric and Nonparametric Test: By: Sai Prakash MBA Insurance Management Pondicherry UniversityDocument10 pagesParametric and Nonparametric Test: By: Sai Prakash MBA Insurance Management Pondicherry UniversitysureshexecutiveNo ratings yet
- Calculus I ProjectDocument9 pagesCalculus I Projectapi-495320622No ratings yet
- Chapter 6 - Differential EquationsDocument33 pagesChapter 6 - Differential Equationsdiktatorimhotep8800No ratings yet
- SicpDocument90 pagesSicppcdanenbNo ratings yet
- Math 8 System of Linear EquationDocument17 pagesMath 8 System of Linear EquationMark Raniel Rimpillo PasalosdosNo ratings yet
- Bernice HuangDocument25 pagesBernice HuangbhuuangNo ratings yet
- Sa - Math 6THDocument3 pagesSa - Math 6THGaganpreet Kaur Fashion DesigningNo ratings yet
- Exam Sta1506 Assessment04 PDFDocument8 pagesExam Sta1506 Assessment04 PDFporschaveNo ratings yet
- Lab 6 DFT and FFTDocument16 pagesLab 6 DFT and FFTZia UllahNo ratings yet
- GATE Chemical Engineering 2003Document12 pagesGATE Chemical Engineering 2003anand singhNo ratings yet