You might also like
- Dynamic Analysis of High-Speed Railway Alignment: Theory and PracticeFrom EverandDynamic Analysis of High-Speed Railway Alignment: Theory and PracticeRating: 4 out of 5 stars4/5 (2)
- Autonomous Stair Climbing Algorithm For A Small Four-Tracked RobotDocument22 pagesAutonomous Stair Climbing Algorithm For A Small Four-Tracked Robotem330100% (1)
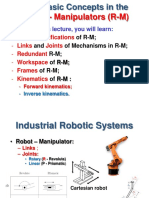
- Teme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021Document28 pagesTeme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirNo ratings yet
- Introduction To Concepts in RoboticsDocument26 pagesIntroduction To Concepts in RoboticsزهديابوانسNo ratings yet
- Kinematics MRDocument27 pagesKinematics MRJohnMejiaNo ratings yet
- Lect 10-11 - Intro To Robotics - Mobile RobotDocument32 pagesLect 10-11 - Intro To Robotics - Mobile RobotMark SherifNo ratings yet
- Csir Co4 PDFDocument100 pagesCsir Co4 PDFRam MNo ratings yet
- 1.2 - Method of Inspection Push Trolley, Motor Trolley, Foot Inspection, Engine & Rear Van Inspection, TRRC, Oscillograph Car, OMS, SPURTDocument120 pages1.2 - Method of Inspection Push Trolley, Motor Trolley, Foot Inspection, Engine & Rear Van Inspection, TRRC, Oscillograph Car, OMS, SPURTChiranjibNo ratings yet
- Avionics: Unit II: Inertial Navigation System Deepak Gaur Assistant Professor MvjceDocument43 pagesAvionics: Unit II: Inertial Navigation System Deepak Gaur Assistant Professor MvjceNagaraja BhagavNo ratings yet
- 2 Robotic Systems ConfigurationsDocument22 pages2 Robotic Systems ConfigurationsAdam MahmoodNo ratings yet
- Steer-by-Wire: Implications For Vehicle Handling and Safety: Paul Yih May 27, 2004Document63 pagesSteer-by-Wire: Implications For Vehicle Handling and Safety: Paul Yih May 27, 2004Mihir ShahNo ratings yet
- RKD Unit 1 StudentDocument40 pagesRKD Unit 1 StudentdharaniNo ratings yet
- Robotics Manohar Notes Unit 3,4 & 5Document19 pagesRobotics Manohar Notes Unit 3,4 & 5Johnson PaulNo ratings yet
- Space Robotics: Seminar OnDocument30 pagesSpace Robotics: Seminar OnDhanish DhanishNo ratings yet
- Lab Manual ME 2409Document135 pagesLab Manual ME 2409Mohit lilhoreNo ratings yet
- Basics of Robotics 24.06.2020Document25 pagesBasics of Robotics 24.06.2020prabhaNo ratings yet
- MECA 324 Sensors & Actuators: Velocity and Acceleration SensorsDocument16 pagesMECA 324 Sensors & Actuators: Velocity and Acceleration SensorsArda GunayNo ratings yet
- Vibration in An Unbalance Multi-Stage Rotor - A ReviewDocument17 pagesVibration in An Unbalance Multi-Stage Rotor - A ReviewA BBNo ratings yet
- UNIT - I - Multistage Rocket LaunchersDocument22 pagesUNIT - I - Multistage Rocket LaunchersPartha SarathyNo ratings yet
- Robotics MotionDocument29 pagesRobotics MotionfenixnomahotmailcomNo ratings yet
- Rocker BogieDocument31 pagesRocker BogieRahul Hans86% (7)
- André Bakker Modeling Flow Fields in Stirred TanksDocument40 pagesAndré Bakker Modeling Flow Fields in Stirred TanksKhalida BekrentchirNo ratings yet
- Bipedal Motion: Jon HagerDocument47 pagesBipedal Motion: Jon HagerJonNo ratings yet
- Fchap 5Document105 pagesFchap 5Leta EmiruNo ratings yet
- 4 Mobile Robot VehiclesDocument56 pages4 Mobile Robot VehiclesHuỳnh Võ Thiện TuấnNo ratings yet
- MECH 412 Dynamics and Control Systems Lab: Cam Analysis ExperimentDocument17 pagesMECH 412 Dynamics and Control Systems Lab: Cam Analysis ExperimentMohammad TahirNo ratings yet
- Rough Terrain Rover by Rocker Bogie MechanismDocument18 pagesRough Terrain Rover by Rocker Bogie MechanismKamal RajuNo ratings yet
- Ntccpptarunschanges2017 11 28 180318195538Document27 pagesNtccpptarunschanges2017 11 28 180318195538leorio88No ratings yet
- Mobot PPT - PDF PDFDocument52 pagesMobot PPT - PDF PDFmonikNo ratings yet
- Biped Landing Pattern Modification Method With Nonlinear Compliance ControlDocument6 pagesBiped Landing Pattern Modification Method With Nonlinear Compliance ControlHaider NeamaNo ratings yet
- 44 - 45 - 46 - Recipes 4Document1 page44 - 45 - 46 - Recipes 4MultiShop BDNo ratings yet
- Space Robotics: Presented by Mahesh Babu.S IV-Btech Electronics and Communication Engineering, SVISTDocument36 pagesSpace Robotics: Presented by Mahesh Babu.S IV-Btech Electronics and Communication Engineering, SVISTANIKET ARKHADENo ratings yet
- Introduction To Concepts in RoboticsDocument22 pagesIntroduction To Concepts in Roboticsharikiran3285No ratings yet
- Basic Running Test of The Cylindrical Tracked Vehicle With Sideways MobilityDocument7 pagesBasic Running Test of The Cylindrical Tracked Vehicle With Sideways Mobilityjazari technoNo ratings yet
- Chapter 3 - Machine Tool DrivesDocument112 pagesChapter 3 - Machine Tool Drivesaman muleNo ratings yet
- Modeling and Adaptive Control of An Omni-Mecanum-Wheeled RobotDocument14 pagesModeling and Adaptive Control of An Omni-Mecanum-Wheeled RobotTelmoNo ratings yet
- Author's Accepted Manuscript: Acta AstronauticaDocument22 pagesAuthor's Accepted Manuscript: Acta AstronauticaKaradiasNo ratings yet
- L02 5 Inertial - Nav SysDocument36 pagesL02 5 Inertial - Nav Sysm gopakumarNo ratings yet
- Synthesis and AnalysisDocument31 pagesSynthesis and Analysiskunal shegokarNo ratings yet
- Industrial Robotics: The Heart of Modern ManufacturingDocument36 pagesIndustrial Robotics: The Heart of Modern ManufacturingGaneshNo ratings yet
- Classification of Shuttle Picking MechanismDocument14 pagesClassification of Shuttle Picking MechanismSANJIT JANANo ratings yet
- Project Presentation On Rocker Bogie Suspension System: Babu Banarasi Das Northern India Institute of Technology, LucknowDocument21 pagesProject Presentation On Rocker Bogie Suspension System: Babu Banarasi Das Northern India Institute of Technology, LucknowAnoop SinghNo ratings yet
- Mobile RobotDocument50 pagesMobile RobotArun GuptaNo ratings yet
- Unit 4 - Three-Phase Induction MotorsDocument93 pagesUnit 4 - Three-Phase Induction MotorsMaribe TshegoNo ratings yet
- Unit 1 Railway Engg AllDocument155 pagesUnit 1 Railway Engg AllAbhishek SinghNo ratings yet
- May 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingDocument8 pagesMay 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingMahmoud El-MahdyNo ratings yet
- Basic Principles of Inertial NavigationDocument26 pagesBasic Principles of Inertial NavigationPalash BhuyanNo ratings yet
- Railwaytrackbyadenpku6!2!11 140214094631 Phpapp01Document68 pagesRailwaytrackbyadenpku6!2!11 140214094631 Phpapp01Sherlin Prem Nishold S oe13d015No ratings yet
- Introduction To ROBOTICS: Mobot: Mobile RobotDocument50 pagesIntroduction To ROBOTICS: Mobot: Mobile RobotManar HosnyNo ratings yet
- 02 Principles of Gyroscopic InstrumentsDocument18 pages02 Principles of Gyroscopic InstrumentsFurkan DuruNo ratings yet
- AE223: Kinematics and Dynamics of Mechanisms: Course ObjectivesDocument4 pagesAE223: Kinematics and Dynamics of Mechanisms: Course ObjectivesPraveen KrishnaNo ratings yet
- Scara RobotDocument17 pagesScara RobotLalit Kushwaha100% (1)
- Rocker BogieDocument31 pagesRocker BogiePavan KumarNo ratings yet
- Orbit Plot Analysis: For Checking Condition of A MachineDocument24 pagesOrbit Plot Analysis: For Checking Condition of A MachineRAKOTONDRAMPARANY Ndimby Njara StephaneNo ratings yet
- The Kinematics Model of A Two-Wheeled Self-Balancing RobotDocument5 pagesThe Kinematics Model of A Two-Wheeled Self-Balancing RobotJason ArensNo ratings yet
- Cam DesignDocument74 pagesCam DesignMuhammad Maarij Farooq0% (1)
- ME303 Wk02 Kinematics Load Determination PDFDocument23 pagesME303 Wk02 Kinematics Load Determination PDF许戎汉No ratings yet
- Lecture #2 Pee3321 Rig Systems Wellbore Elements and VolumesDocument25 pagesLecture #2 Pee3321 Rig Systems Wellbore Elements and Volumesحيدر بادي - Haider Badi100% (1)
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- When and Where To Take Class: Instructor: Chao-Ching HoDocument8 pagesWhen and Where To Take Class: Instructor: Chao-Ching Hoem330No ratings yet
- Software PID Control of An Inverted Pendulum Using The PIC16F684Document38 pagesSoftware PID Control of An Inverted Pendulum Using The PIC16F684em330No ratings yet
- National Yunlin University of Science A ND Technology: Parallel Master Port (PMP)Document24 pagesNational Yunlin University of Science A ND Technology: Parallel Master Port (PMP)em330No ratings yet
- 2010 論文報告 何焌嘉Document39 pages2010 論文報告 何焌嘉em330No ratings yet
- Software PID Control of An Inverted Pendulum UsingDocument20 pagesSoftware PID Control of An Inverted Pendulum Usingem330No ratings yet
- Inter-Integrated Circuit & IR MLX90614 IN CCSDocument17 pagesInter-Integrated Circuit & IR MLX90614 IN CCSem330No ratings yet
- Rocker-Type W-Shaped Track RobotDocument16 pagesRocker-Type W-Shaped Track Robotem330No ratings yet
- 2009 暑期訓練手冊Document4 pages2009 暑期訓練手冊em330No ratings yet
- Restricted U.S. Navy Intelligence Support To Naval Operations Manual NWP 2-01 PDFDocument100 pagesRestricted U.S. Navy Intelligence Support To Naval Operations Manual NWP 2-01 PDFSHTF PLAN100% (1)
- Liugong Global Product PosterDocument2 pagesLiugong Global Product PosterSandeep Kumar100% (2)
- HRTC Print TicketDocument2 pagesHRTC Print Ticketvikas16051998No ratings yet
- ShujukuDocument134 pagesShujukuJin XueNo ratings yet
- Effect Criteria Rank: Typical Rankings of Severity Indices (Ford Motor Company, 2001)Document4 pagesEffect Criteria Rank: Typical Rankings of Severity Indices (Ford Motor Company, 2001)ain liyanaNo ratings yet
- CT Law Eng 0Document43 pagesCT Law Eng 0win laiNo ratings yet
- MK Citizen - Bond in Bucks - 2Document1 pageMK Citizen - Bond in Bucks - 2RetepNamenotsNo ratings yet
- Zurab Bezhanovi "A Guide To Maritime English"Document13 pagesZurab Bezhanovi "A Guide To Maritime English"Monster BibiloNo ratings yet
- 2017 Lifting Device CatalogDocument44 pages2017 Lifting Device CatalogEmílio BeckerNo ratings yet
- Single Axle 4: Esal EsalDocument4 pagesSingle Axle 4: Esal Esalmaurice baptista guammeNo ratings yet
- Notes Wheels and Tyres Definition Types Advantages Disadvantages and Applications With PDFDocument13 pagesNotes Wheels and Tyres Definition Types Advantages Disadvantages and Applications With PDFraghavNo ratings yet
- Yobido Vs CA 281 SCRA 1 (1997)Document2 pagesYobido Vs CA 281 SCRA 1 (1997)Benitez GheroldNo ratings yet
- Some Shipwrecks of Brier Island, Nova ScotiaDocument2 pagesSome Shipwrecks of Brier Island, Nova ScotiaART'S PLACENo ratings yet
- CRCP Manual 2012Document173 pagesCRCP Manual 2012Asim Amin100% (4)
- Md17iu 001BW PDFDocument72 pagesMd17iu 001BW PDFVictorAndradeRNo ratings yet
- AustraliaDocument343 pagesAustraliaChandan KumarNo ratings yet
- Duarte 2015Document15 pagesDuarte 2015Carlos YascaribayNo ratings yet
- Rivertown. Rethinking Urban RiversDocument231 pagesRivertown. Rethinking Urban RiversFrancisco Javier Delgado Aguilar100% (1)
- Shipping Instruction To MESADocument2 pagesShipping Instruction To MESAadi wibowoNo ratings yet
- Price-List of DD MOTORSDocument2 pagesPrice-List of DD MOTORSArpit Jain0% (1)
- The Airbus X EXTENDED in FSXDocument18 pagesThe Airbus X EXTENDED in FSXAntonio LimaNo ratings yet
- Scaffold Ladder Safety 1569604009Document128 pagesScaffold Ladder Safety 1569604009eerrddeemmNo ratings yet
- Indian Ocean Politics PDFDocument21 pagesIndian Ocean Politics PDFAsma RaisNo ratings yet
- Morooka MST2200 MST2500 MST3000 MST4000 Operation and Maintenance ManualDocument67 pagesMorooka MST2200 MST2500 MST3000 MST4000 Operation and Maintenance Manualjuan miranda100% (1)
- 5D4N Medan Berastagi TourDocument5 pages5D4N Medan Berastagi TourWanM.SyamimNo ratings yet
- Adey. Mobilities, Meetings, and Futures: An Interview With John UrryDocument17 pagesAdey. Mobilities, Meetings, and Futures: An Interview With John UrryjomciNo ratings yet
- Engineering Standards: EN 50121-2 (CENELEC)Document2 pagesEngineering Standards: EN 50121-2 (CENELEC)Deepak Gehlot100% (1)
- Fleet Safety EbookDocument16 pagesFleet Safety EbookSrikanth BammhideNo ratings yet
- And Then There Were..Document68 pagesAnd Then There Were..robertas negudinasNo ratings yet
- 150 5370 10H PDFDocument727 pages150 5370 10H PDFRen G'meszaNo ratings yet