You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Iftikhar Ahmad: BS Informational TechnologyDocument1 pageIftikhar Ahmad: BS Informational Technologyakhtar abbasNo ratings yet
- Kidsor Home AppliancesDocument5 pagesKidsor Home AppliancesSrinivasan SriniNo ratings yet
- Birmingham ProspectusDocument62 pagesBirmingham ProspectusmentalpapyrusNo ratings yet
- CrossoverDocument15 pagesCrossoverGeorge LunguNo ratings yet
- TOFD Full NotesDocument80 pagesTOFD Full NotesRamesh mudunuri79% (14)
- Communication LetterDocument4 pagesCommunication LetterEj FerrerNo ratings yet
- ANSI E1.50-1 2017 Entertainment Technology - Requirements For The Structural Support of Temporary LED, Video & Display SystemsDocument19 pagesANSI E1.50-1 2017 Entertainment Technology - Requirements For The Structural Support of Temporary LED, Video & Display SystemsGabriel neagaNo ratings yet
- Billing 2Document6 pagesBilling 2Diamond Dc100% (6)
- HP TruCluster Server V5.1ADocument21 pagesHP TruCluster Server V5.1AAlexandru BotnariNo ratings yet
- Centrifugal Vs Reciprocating Compressor - Turbomachinery Magazine PDFDocument2 pagesCentrifugal Vs Reciprocating Compressor - Turbomachinery Magazine PDFReyes SanchezNo ratings yet
- Absorption&Insulation DataDocument26 pagesAbsorption&Insulation Dataharoub_nasNo ratings yet
- John Deere Parts CatalogueDocument47 pagesJohn Deere Parts CatalogueAdam Ioan100% (2)
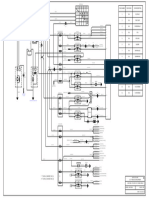
- DOST DTVS BS6 POWER CircuitDocument1 pageDOST DTVS BS6 POWER Circuitak ramNo ratings yet
- Shading Devices VaishaliDocument12 pagesShading Devices VaishalivaishaliNo ratings yet
- Biogas PlantDocument37 pagesBiogas PlantMahaManthra100% (1)
- SP GB LX CDFM ZTDocument9 pagesSP GB LX CDFM ZTJoyner Daniel Garcia DuarteNo ratings yet
- Wheel Loader Links, Bellcranks, Pins & BushingsDocument7 pagesWheel Loader Links, Bellcranks, Pins & BushingsMax SashikhinNo ratings yet
- Comparison Skyre5 9 11Document5 pagesComparison Skyre5 9 11nehar shubheschaNo ratings yet
- Burj KhalifaDocument29 pagesBurj KhalifaAnonymous hprsT3WlPNo ratings yet
- Final PPT BpoDocument21 pagesFinal PPT BpoPradeepNo ratings yet
- Management of Change Order Claims in the Egyptian Industrial Construction SectorDocument106 pagesManagement of Change Order Claims in the Egyptian Industrial Construction SectorhymerchmidtNo ratings yet
- GST Project Report SummaryDocument14 pagesGST Project Report SummaryWwe MomentsNo ratings yet
- Trawler SampleDocument80 pagesTrawler SampleChet Stephens100% (2)
- Closed Source DocumentationDocument12 pagesClosed Source Documentation이즈르엘No ratings yet
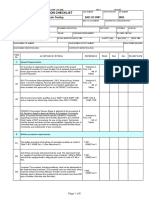
- ARAMCO UT Inspection Checklist - SAIC-UT-2001Document6 pagesARAMCO UT Inspection Checklist - SAIC-UT-2001Anonymous hBBam1n100% (1)
- Work Method Statement For Roof Sheeting WorksDocument8 pagesWork Method Statement For Roof Sheeting WorksRepl microsoft, Pune100% (1)
- QCAI476 LfiltersDocument11 pagesQCAI476 LfilterscivodulNo ratings yet
- Estimation Quality Control of Residential G+3 BuildingDocument5 pagesEstimation Quality Control of Residential G+3 BuildingInternational Journal of Innovative Science and Research Technology100% (1)
- Oval DPR Overall For NGN ProjectDocument4 pagesOval DPR Overall For NGN ProjectRashmi Ranjan MohantyNo ratings yet