You might also like
- Detection of Learner's Affective State Based On Mouse MovementsDocument10 pagesDetection of Learner's Affective State Based On Mouse MovementsJournal of ComputingNo ratings yet
- Dynamical Systems Method for Solving Nonlinear Operator EquationsFrom EverandDynamical Systems Method for Solving Nonlinear Operator EquationsRating: 5 out of 5 stars5/5 (1)
- Matlab Tutorial UmichDocument15 pagesMatlab Tutorial UmichNandita AbhyankarNo ratings yet
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsFrom EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNo ratings yet
- Signals and Systems 8Document26 pagesSignals and Systems 8Rodolfo García GalazNo ratings yet
- Statistical Monitoring of Complex Multivatiate Processes: With Applications in Industrial Process ControlFrom EverandStatistical Monitoring of Complex Multivatiate Processes: With Applications in Industrial Process ControlNo ratings yet
- FFT Window Functions - Limits On FFT AnalysisDocument4 pagesFFT Window Functions - Limits On FFT AnalysisA. VillaNo ratings yet
- FINA3010 Summary For Lecture 1,2Document9 pagesFINA3010 Summary For Lecture 1,2Koon Sing ChanNo ratings yet
- Mitra Ch13 3edDocument9 pagesMitra Ch13 3edMohammad Khairul Halim RimonNo ratings yet
- Manual Db2latexDocument57 pagesManual Db2latexavalorinsaNo ratings yet
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- Marple AnalyticDocument4 pagesMarple AnalyticsssskkkkllllNo ratings yet
- Signal Processing in MATLABDocument3 pagesSignal Processing in MATLABRadu VancaNo ratings yet
- PCDISPDocument28 pagesPCDISPlatecNo ratings yet
- Lifted Newton OptimizationDocument60 pagesLifted Newton OptimizationAndrea SpencerNo ratings yet
- Numerical Solution MethodsDocument9 pagesNumerical Solution Methodsrahpooye313100% (1)
- System of Linear Equations - Spring - 20-21Document35 pagesSystem of Linear Equations - Spring - 20-21maimona rahmanNo ratings yet
- Problems Chaptr 1 PDFDocument4 pagesProblems Chaptr 1 PDFcaught inNo ratings yet
- Newton Gauss MethodDocument37 pagesNewton Gauss MethodLucas WeaverNo ratings yet
- Optimization Open Method - 3Document6 pagesOptimization Open Method - 3free5050No ratings yet
- Chapter 4 PDEDocument17 pagesChapter 4 PDEHui JingNo ratings yet
- App.A - Detection and Estimation in Additive Gaussian Noise PDFDocument55 pagesApp.A - Detection and Estimation in Additive Gaussian Noise PDFLê Dương LongNo ratings yet
- Principal Components AnalysisDocument16 pagesPrincipal Components AnalysisShangeetha TangarajNo ratings yet
- Applied Problems in Maxima and MinimaDocument28 pagesApplied Problems in Maxima and Minimaisrael0606No ratings yet
- QueueingDocument50 pagesQueueingJagan RajendiranNo ratings yet
- Numerical Solution of ODEs-IVPDocument32 pagesNumerical Solution of ODEs-IVPmitch_g_101No ratings yet
- Lyapunov Exponents and Chaos TheoryDocument33 pagesLyapunov Exponents and Chaos Theoryhariraumurthy6791No ratings yet
- Ce206 OdeDocument23 pagesCe206 OdeBorhan ShaikatNo ratings yet
- Solution Manual To Chapter 05Document13 pagesSolution Manual To Chapter 05Vimox S Shah100% (1)
- Bessel Function ZeroesDocument5 pagesBessel Function Zeroesputin208No ratings yet
- MA3004 Part 3: Computational Fluid Dynamics (CFD) : Martin SkoteDocument46 pagesMA3004 Part 3: Computational Fluid Dynamics (CFD) : Martin SkotedavidbehNo ratings yet
- Lecture NotesDocument136 pagesLecture Notestoymaker09No ratings yet
- Time Series Lecture NotesDocument97 pagesTime Series Lecture NotesApam BenjaminNo ratings yet
- Statistical Signal Processing: ECE 5615 Lecture Notes Spring 201 9Document32 pagesStatistical Signal Processing: ECE 5615 Lecture Notes Spring 201 9rizwanNo ratings yet
- Numerical Methods For Differential Equations: Chapter 2: Runge-Kutta and Linear Multistep MethodsDocument68 pagesNumerical Methods For Differential Equations: Chapter 2: Runge-Kutta and Linear Multistep MethodsAjeeshAzeezNo ratings yet
- Evaluating Fourier Transforms With MATLABDocument11 pagesEvaluating Fourier Transforms With MATLABAhsan Ratyal100% (1)
- HPLC ExperimentDocument4 pagesHPLC ExperimentFrances PaulineNo ratings yet
- False Position MatlabDocument12 pagesFalse Position MatlabMattNo ratings yet
- Solution CH # 5Document39 pagesSolution CH # 5Al FarabiNo ratings yet
- Lec 01 GENG 300 Numerical MethodsDocument37 pagesLec 01 GENG 300 Numerical MethodsislamNo ratings yet
- Stochastic ProcessesDocument6 pagesStochastic ProcessesmelanocitosNo ratings yet
- A General Approach To Derivative Calculation Using WaveletDocument9 pagesA General Approach To Derivative Calculation Using WaveletDinesh ZanwarNo ratings yet
- CH 03Document31 pagesCH 03TríNo ratings yet
- Experiment # 01Document9 pagesExperiment # 01M.USMAN BIN AHMEDNo ratings yet
- Volterra SeriesDocument50 pagesVolterra Seriessaleh1978No ratings yet
- Stilson-Smith - Alias-Free Digital Synthesis of Classic Analog Waveforms (BLIT)Document12 pagesStilson-Smith - Alias-Free Digital Synthesis of Classic Analog Waveforms (BLIT)HangTheBankersNo ratings yet
- Collocated FVMDocument17 pagesCollocated FVMapoorvs75No ratings yet
- An Introduction To An Introduction To Optimization Optimization Using Using Evolutionary Algorithms Evolutionary AlgorithmsDocument45 pagesAn Introduction To An Introduction To Optimization Optimization Using Using Evolutionary Algorithms Evolutionary AlgorithmsSai Naga Sri HarshaNo ratings yet
- Lyapunov StabilityDocument26 pagesLyapunov StabilitySri MathiNo ratings yet
- Stochastic Processes NotesDocument22 pagesStochastic Processes Notesels_872100% (1)
- ECA ManualDocument62 pagesECA ManualAnonymous gP8ivl7fNo ratings yet
- Blind Source Separation MATLAB CodeDocument2 pagesBlind Source Separation MATLAB CodeHariprasath SubbaraoNo ratings yet
- Eikos A Simulation Toolbox For Sensitivity AnalysisDocument57 pagesEikos A Simulation Toolbox For Sensitivity AnalysisOnur Deniz NarinNo ratings yet
- Newton-Raphson Vs BroydenDocument6 pagesNewton-Raphson Vs Broydencorreita77No ratings yet
- Andrew Jackson Slides OFW7Document74 pagesAndrew Jackson Slides OFW7venkat_09No ratings yet
- 2 Scale HomogenizationDocument82 pages2 Scale HomogenizationSamNo ratings yet
- Unstructured Grids and Multigroup Neutron Diffusivity EquationDocument169 pagesUnstructured Grids and Multigroup Neutron Diffusivity EquationSamNo ratings yet
- Economic Evaluation of Cuyama South Field Water Flooding and Tuning Salinity PracticesDocument40 pagesEconomic Evaluation of Cuyama South Field Water Flooding and Tuning Salinity PracticesSamNo ratings yet
- Geometry (Part 1) Lines and AnglesDocument15 pagesGeometry (Part 1) Lines and Anglesunknown :)No ratings yet
- Maths VocabularyDocument8 pagesMaths VocabularyAlex WuNo ratings yet
- Aschi Keys Code 4ajyjyasdswsdsdkjdDocument10 pagesAschi Keys Code 4ajyjyasdswsdsdkjdFazle ElahiNo ratings yet
- Week 1 Module 1 Lesson 1 Grade 9 - Modular Distance ModalityDocument2 pagesWeek 1 Module 1 Lesson 1 Grade 9 - Modular Distance ModalityEricha SolomonNo ratings yet
- Linear Algebra With Applications 2nd Edition Bretscher Solutions Manual Full Chapter PDFDocument37 pagesLinear Algebra With Applications 2nd Edition Bretscher Solutions Manual Full Chapter PDFxavialaylacs4vl4100% (15)
- Introduction To Statistics and Probability: March 2019Document267 pagesIntroduction To Statistics and Probability: March 2019scoffy shaNo ratings yet
- Ncert Solutions Class 10 Maths Chapter 10 CirclesDocument24 pagesNcert Solutions Class 10 Maths Chapter 10 Circleshetv031013No ratings yet
- Cambridge Primary Checkpoint Mathematics0845Past Papers 2020 2006Document746 pagesCambridge Primary Checkpoint Mathematics0845Past Papers 2020 2006Mohammed100% (2)
- Slides - Simple Linear RegressionDocument35 pagesSlides - Simple Linear RegressionJarir AhmedNo ratings yet
- Classes and Objects by DK MamonaiDocument10 pagesClasses and Objects by DK MamonaiDarya MemonNo ratings yet
- Statistics ExamDocument1 pageStatistics ExamGom-o Eugenio Jr0% (1)
- Nonlinear Programming Techniques For Operative Planning in Large Drinking Water NetworksDocument27 pagesNonlinear Programming Techniques For Operative Planning in Large Drinking Water NetworksumairnedNo ratings yet
- Math Vocabulary PreKDocument3 pagesMath Vocabulary PreKlittlegus100% (3)
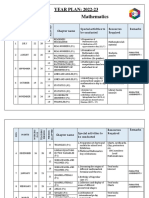
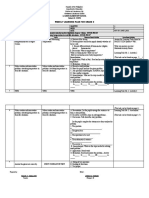
- 9th Class Annual Plan Final With Lesson PlanDocument7 pages9th Class Annual Plan Final With Lesson PlanAchanta PrakashNo ratings yet
- Russell: Paradox and Type Theory: Dr. James Studd FRW Lecture 4. Friday Wk. 4, HT14Document9 pagesRussell: Paradox and Type Theory: Dr. James Studd FRW Lecture 4. Friday Wk. 4, HT14anti ramirezNo ratings yet
- Lecture 1 of 5: Topic: 5.0 Functions and Graphs SUBTOPIC: 5.1 FunctionsDocument26 pagesLecture 1 of 5: Topic: 5.0 Functions and Graphs SUBTOPIC: 5.1 FunctionsNur Sakinah IdrisNo ratings yet
- Exterior Angles-Answer KeyDocument1 pageExterior Angles-Answer KeyWalaa MagdyNo ratings yet
- G5 Q3W2 DLL MATH (MELCs)Document13 pagesG5 Q3W2 DLL MATH (MELCs)Alice TugayNo ratings yet
- 2 Linear TransformationsDocument32 pages2 Linear TransformationsShanNo ratings yet
- Homework #6, Sec 11.4 and 12.1Document7 pagesHomework #6, Sec 11.4 and 12.1Masaya Sato100% (1)
- Inequalities Questions MMEDocument7 pagesInequalities Questions MMELoka Pavani Senthil GaneshNo ratings yet
- Grade 8 Math Module 3 PDFDocument23 pagesGrade 8 Math Module 3 PDFAmi RA67% (12)
- B Splines 04 PDFDocument16 pagesB Splines 04 PDFShawn PetersenNo ratings yet
- UPT Matematik Tahun 4 K1 K2Document9 pagesUPT Matematik Tahun 4 K1 K2Elsa Faleeda Mohd YusoffNo ratings yet
- A Fractal Concept of War: Maurice PassmanDocument17 pagesA Fractal Concept of War: Maurice PassmanJanj JunjuaNo ratings yet
- Melcs Day Objectives Topic/s Classroom-Based Activities Home-Based Activities 1Document2 pagesMelcs Day Objectives Topic/s Classroom-Based Activities Home-Based Activities 1Raquel CarteraNo ratings yet
- Slice MathDocument2 pagesSlice MathksshashidharNo ratings yet
- BNU1501 - Assignment 02 - Semester 1-2023Document6 pagesBNU1501 - Assignment 02 - Semester 1-2023Olwethu PhikeNo ratings yet
- 22 1 Bounded Linear OperatorsDocument5 pages22 1 Bounded Linear OperatorsDmitri ZaitsevNo ratings yet
- Mid Term Exam Review Sheet 1Document9 pagesMid Term Exam Review Sheet 1SiLeNtxoNo ratings yet