You might also like
- Ping Ultrasonic Range FinderDocument5 pagesPing Ultrasonic Range FinderIdris Affandy100% (1)
- Ping Distance Sensor KickStartDocument6 pagesPing Distance Sensor KickStartJean Tello100% (1)
- Proj 4Document4 pagesProj 4xyzNo ratings yet
- BESTSENSORPROGRAMMINGDocument6 pagesBESTSENSORPROGRAMMINGChickinNo ratings yet
- Proj RDocument4 pagesProj RxyzNo ratings yet
- PIR and DC MotorDocument45 pagesPIR and DC MotorD4D DREDD ytNo ratings yet
- Name:-Sakshi Zade Roll No: - 15 Section:-J Branch: - IT Experiment No.2Document4 pagesName:-Sakshi Zade Roll No: - 15 Section:-J Branch: - IT Experiment No.2Archana Pradip LokhandeNo ratings yet
- Monitor Program On Picosatellite Using Respberry Pi: Submitted by AJITH B.J (ENG20CS1002) Roshan Naik (Eng20Cs1017)Document17 pagesMonitor Program On Picosatellite Using Respberry Pi: Submitted by AJITH B.J (ENG20CS1002) Roshan Naik (Eng20Cs1017)Eng20cs1017 Roshan NaikNo ratings yet
- Sensor PingDocument17 pagesSensor Pingjoseluisbb_87504100% (1)
- PING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsDocument12 pagesPING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsAn Vesh100% (1)
- PING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsDocument12 pagesPING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsIc MicNo ratings yet
- Automation Code-1Document5 pagesAutomation Code-1api-594759083No ratings yet
- Ultrasonic and LED CodeDocument3 pagesUltrasonic and LED CodeGroove GamingNo ratings yet
- Latihan 2Document5 pagesLatihan 2alifNo ratings yet
- Parallax 28015 DatasheetDocument20 pagesParallax 28015 DatasheetTeddy HeroNo ratings yet
- (QUICK START GUIDE) Set Up An Ultrasonic Range Finder On An ArduinoDocument7 pages(QUICK START GUIDE) Set Up An Ultrasonic Range Finder On An Arduinotharun sabinikariNo ratings yet
- ClampOn Pig Detector Dec2018 PDFDocument2 pagesClampOn Pig Detector Dec2018 PDFIswanto PurnomoNo ratings yet
- Us 100 Ultrasonic Sensor ModuleDocument6 pagesUs 100 Ultrasonic Sensor ModuleArturo Hernandes100% (2)
- Ultrasound Module ModDocument5 pagesUltrasound Module ModAdam MikitzelNo ratings yet
- Experiment 1Document9 pagesExperiment 1hafizajemal9No ratings yet
- Third Eye For The BlindDocument12 pagesThird Eye For The BlindRajalakshmi75% (4)
- Presentation Smart StickDocument16 pagesPresentation Smart StickwhatseNo ratings yet
- IoT Assn 1Document3 pagesIoT Assn 1Prakriti0% (1)
- Forest Monitoring SystemDocument21 pagesForest Monitoring System17O3099 Sandhya S.No ratings yet
- Working With Ultrasonic Sensor Using Arduino BoardDocument6 pagesWorking With Ultrasonic Sensor Using Arduino BoardDaniel Evans100% (2)
- PING v1.2Document13 pagesPING v1.2Alejandro DiazNo ratings yet
- Precsion Lab 4Document4 pagesPrecsion Lab 4Areeba MujtabaNo ratings yet
- Project Work1Document12 pagesProject Work1Shiv ShNo ratings yet
- Automatic Door Opening Using Arduino HRSC04 UltrasDocument8 pagesAutomatic Door Opening Using Arduino HRSC04 UltrasNaveen KumarNo ratings yet
- SUMO Fire Fighting KitDocument23 pagesSUMO Fire Fighting KitKlare MontefalcoNo ratings yet
- Laserping Rangefinder Module (#28041) : FeaturesDocument8 pagesLaserping Rangefinder Module (#28041) : Featuresachmad zubairNo ratings yet
- PING) ) ) Ultrasonic Distance Sensor: Onic P Ressu Re Wa Ves Ping) ) ) SP EakerDocument6 pagesPING) ) ) Ultrasonic Distance Sensor: Onic P Ressu Re Wa Ves Ping) ) ) SP EakerWafa'a S. Al-HawajrehNo ratings yet
- Smart Blind Stick Project ReportDocument15 pagesSmart Blind Stick Project ReportAnkit Tripathi100% (1)
- Ultrasonicsensor 170828140914Document18 pagesUltrasonicsensor 170828140914Phan Duy LinhNo ratings yet
- PING) ) ) ™ Ultrasonic Range Finder (#28015) : FeaturesDocument12 pagesPING) ) ) ™ Ultrasonic Range Finder (#28015) : FeaturesLiem LuiNo ratings yet
- Radar ProjectDocument23 pagesRadar ProjectVarun KumarNo ratings yet
- Radar SystemDocument19 pagesRadar SystemVishal BharatiNo ratings yet
- Powerpoint Presentation On: Theft Detection SystemDocument16 pagesPowerpoint Presentation On: Theft Detection System7074 Bindu prasad ReddyNo ratings yet
- Bus Tracking SystemDocument19 pagesBus Tracking SystemErole Technologies Pvt ltd Homemade EngineerNo ratings yet
- Intelligent System For Toxic Gas Detection Using GSMDocument36 pagesIntelligent System For Toxic Gas Detection Using GSMstalin882657% (7)
- Embedded Systems: Assist. Prof. Rassim Suliyev - SDU 2018 Week 5Document26 pagesEmbedded Systems: Assist. Prof. Rassim Suliyev - SDU 2018 Week 5indrahermawanNo ratings yet
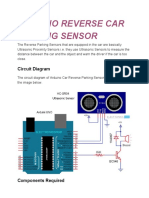
- Arduino Reverse Car Parking Sensor PDFDocument6 pagesArduino Reverse Car Parking Sensor PDFSaumya Thakur100% (1)
- Sensores ArduinoDocument22 pagesSensores Arduinoslifer561No ratings yet
- DS 000347 ICM 42688 P v1.7Document110 pagesDS 000347 ICM 42688 P v1.7aleruedaNo ratings yet
- Infrared Receiver + NEC Coding Remote Control MaterialsDocument6 pagesInfrared Receiver + NEC Coding Remote Control MaterialsAdam MikitzelNo ratings yet
- Darshit 1.4Document4 pagesDarshit 1.4darshitsheth136No ratings yet
- Smart Bin: Project GuideDocument19 pagesSmart Bin: Project GuideShashwat SharmaNo ratings yet
- Ultrasonic Distance Meter 1Document21 pagesUltrasonic Distance Meter 1Naseef Parambattu PalliyaliNo ratings yet
- DIY Project Group 6 Report - Gesture Controlled Robotic VehicleDocument16 pagesDIY Project Group 6 Report - Gesture Controlled Robotic VehiclekritiNo ratings yet
- 6Document19 pages6Aman Goel100% (1)
- Lec 2 - Arduino Sensors ModuleDocument31 pagesLec 2 - Arduino Sensors Moduleosama.20en714No ratings yet
- Summer Training: A Report ONDocument18 pagesSummer Training: A Report ONBhaveen ReddyNo ratings yet
- Project Chirag and TanujDocument41 pagesProject Chirag and TanujANUJ KUMARNo ratings yet
- Wa0002.Document74 pagesWa0002.akvakarthik2005No ratings yet
- IoT Practical File BETN1EC18004Document34 pagesIoT Practical File BETN1EC18004Hashtag BloggersNo ratings yet
- Ultrasonic SensorDocument18 pagesUltrasonic SensorGerard AlfonsoNo ratings yet
- Beginning Digital Electronics through ProjectsFrom EverandBeginning Digital Electronics through ProjectsRating: 5 out of 5 stars5/5 (1)
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- 3GDocument30 pages3GReymar BelmonteNo ratings yet
- 3rd GenerationDocument24 pages3rd GenerationReymar BelmonteNo ratings yet
- Decision-Making: Function of Management: Belmonte, Reymar A. Breganza, Edmar O. Butil, Chingching ADocument11 pagesDecision-Making: Function of Management: Belmonte, Reymar A. Breganza, Edmar O. Butil, Chingching AReymar BelmonteNo ratings yet
- 3rd GenerationDocument13 pages3rd GenerationReymar BelmonteNo ratings yet