You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Fundamentals of Jet Propulsion With Applications by Ronald D. Flack (ch-7)Document32 pagesFundamentals of Jet Propulsion With Applications by Ronald D. Flack (ch-7)Anil Kumar RoutNo ratings yet
- Lecture 3 - Rectangular Components of Vectors (Two Dimensional) Cartesian Vectors (Three-Dimensional) PDFDocument32 pagesLecture 3 - Rectangular Components of Vectors (Two Dimensional) Cartesian Vectors (Three-Dimensional) PDFTriphon Gyle BalidiongNo ratings yet
- Lab Report NozzleDocument9 pagesLab Report NozzleMuhammad Amir ZarifNo ratings yet
- All HW 303 Fall 17Document138 pagesAll HW 303 Fall 17Muhammad MehadiNo ratings yet
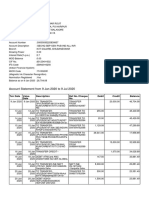
- Account Statement From 9 Jan 2020 To 9 Jul 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument10 pagesAccount Statement From 9 Jan 2020 To 9 Jul 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceAnil Kumar RoutNo ratings yet
- Neuro-Fuzzy and Soft Computing-A Computational Approach To Learning and Machine Intelligence (Book Review)Document4 pagesNeuro-Fuzzy and Soft Computing-A Computational Approach To Learning and Machine Intelligence (Book Review)Anil Kumar RoutNo ratings yet
- Analysis and Fabrication of Polymer Reinforced Fly-Ash Composites EngineDocument6 pagesAnalysis and Fabrication of Polymer Reinforced Fly-Ash Composites EngineAnil Kumar RoutNo ratings yet
- 2d Transient Flow AnalysisDocument13 pages2d Transient Flow AnalysisAnil Kumar RoutNo ratings yet
- 09a52102 Aerodynamics II PDFDocument6 pages09a52102 Aerodynamics II PDFAnil Kumar RoutNo ratings yet
- Pryor Et Al. (2017) Have InvestigatedDocument1 pagePryor Et Al. (2017) Have InvestigatedAnil Kumar RoutNo ratings yet
- CFD HandbookDocument275 pagesCFD HandbookWahid AliNo ratings yet
- Selecting CFD Software: Appendix ADocument13 pagesSelecting CFD Software: Appendix AAnil Kumar RoutNo ratings yet
- EcfdDocument335 pagesEcfdAnil Kumar RoutNo ratings yet
- Combustion 10Document21 pagesCombustion 10Anil Kumar RoutNo ratings yet
- 100 TOP MOST MAGNETISM and ELECTROMAGNETISM - Electrical Engineering Multiple Choice Questions and AnswersDocument9 pages100 TOP MOST MAGNETISM and ELECTROMAGNETISM - Electrical Engineering Multiple Choice Questions and Answersrose maryNo ratings yet
- PTFE Specifications PDFDocument1 pagePTFE Specifications PDFAulia AnnaNo ratings yet
- MECH3780 Fluid Mechanics 2 and CFDDocument14 pagesMECH3780 Fluid Mechanics 2 and CFDninibearNo ratings yet
- Newton Laws of Motion and Friction - DPP 03 - (Arjuna NEET 3.0 2023)Document3 pagesNewton Laws of Motion and Friction - DPP 03 - (Arjuna NEET 3.0 2023)lakshyabanwani873No ratings yet
- Bequette 1 Y2Document25 pagesBequette 1 Y2Kami JaraNo ratings yet
- MAT2322 Notes - by Eric HuaDocument63 pagesMAT2322 Notes - by Eric HuaSahilGargNo ratings yet
- Problem: Analyze The 2D Truss As Shown Below. All The Members Have Cross-Sectional Area ofDocument5 pagesProblem: Analyze The 2D Truss As Shown Below. All The Members Have Cross-Sectional Area ofsmg26thmayNo ratings yet
- Symmetry, Groups and Crystal StructuresDocument4 pagesSymmetry, Groups and Crystal StructuresAlsodNo ratings yet
- Electromotive Force Magnetic FluxDocument8 pagesElectromotive Force Magnetic FluxJalal Al-SaifNo ratings yet
- EE133 Final-Examination MauhayDocument8 pagesEE133 Final-Examination MauhayJohn Zyrus MauhayNo ratings yet
- X.Wang Numericalsimulationofstick SlipbehavioursoftypicalfaultsDocument19 pagesX.Wang Numericalsimulationofstick SlipbehavioursoftypicalfaultsjeovanNo ratings yet
- Xray HistoryDocument5 pagesXray Historyapi-3710134No ratings yet
- Manualwise: Designing Beam CopesDocument4 pagesManualwise: Designing Beam CopesspaceheaterNo ratings yet
- 201505 緑測器カタログ 中国版 0604Document12 pages201505 緑測器カタログ 中国版 0604YiBiauChiouNo ratings yet
- MENG 302L Lab 4: Poisson's RatioDocument8 pagesMENG 302L Lab 4: Poisson's Ratiosudhir_kumar_33No ratings yet
- Physic Traducido PDFDocument123 pagesPhysic Traducido PDFBrashan CassidyNo ratings yet
- Max Planck and The Genesis of The Energy Quanta inDocument6 pagesMax Planck and The Genesis of The Energy Quanta inCatalin MeiuNo ratings yet
- Physics Paper 1 Term 1 2015 - Y11Document17 pagesPhysics Paper 1 Term 1 2015 - Y11Ezra Loganathan MuniandiNo ratings yet
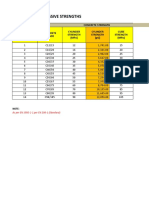
- Concrete Compressive StrengthDocument3 pagesConcrete Compressive StrengthFranklyn P. Genove100% (1)
- (Springer Series in Synergetics 60) Yu. A. Kravtsov (Auth.), Professor Dr. Yurii A. Kravtsov (Eds.) - Limits of Predictability-Springer-Verlag Berlin Heidelberg (1993)Document260 pages(Springer Series in Synergetics 60) Yu. A. Kravtsov (Auth.), Professor Dr. Yurii A. Kravtsov (Eds.) - Limits of Predictability-Springer-Verlag Berlin Heidelberg (1993)Ashiq Elahi Design & Application EngineerNo ratings yet
- Electrode Kinetics 1Document15 pagesElectrode Kinetics 1Shriram NandagopalNo ratings yet
- 1.3contaminant TransportDocument34 pages1.3contaminant TransportvkeleviNo ratings yet
- Physics 35 Stellar EvolutionDocument46 pagesPhysics 35 Stellar Evolutionarjel galvanNo ratings yet
- Khavrsohkin - Geophysical Fields Around The PyramidsDocument41 pagesKhavrsohkin - Geophysical Fields Around The PyramidsPaolopiniNo ratings yet
- Introduction To Heat Exchangers: Types, Classification and AnalysisDocument13 pagesIntroduction To Heat Exchangers: Types, Classification and AnalysisPrinceJohnNo ratings yet
- Froude-Krylov Force CoefficientDocument20 pagesFroude-Krylov Force CoefficientLazaros NtoanidisNo ratings yet
- Exm - RM.RQM - Asu.0026 Iss A Fem PDFDocument25 pagesExm - RM.RQM - Asu.0026 Iss A Fem PDFAlvarohjNo ratings yet