You might also like
- Manual Del Usuario Firmware Deviation para Devo6/8/12Document1,090 pagesManual Del Usuario Firmware Deviation para Devo6/8/12serabile100% (1)
- Nuvoscan: - Automated Under Vehicle Scanning SystemDocument3 pagesNuvoscan: - Automated Under Vehicle Scanning Systemdiana rahmaNo ratings yet
- #1 ARacer RC Super X IntroductionDocument63 pages#1 ARacer RC Super X Introductionmida0114100% (1)
- Sightline Product OverviewDocument18 pagesSightline Product OverviewStanley Ochieng' OumaNo ratings yet
- QDrone 2 Data SheetDocument2 pagesQDrone 2 Data SheetThế Anh NguyễnNo ratings yet
- Redmi S2 Device ReportDocument6 pagesRedmi S2 Device Reportonald lumowaNo ratings yet
- E Service C-Arm 14 Image Control 2Document10 pagesE Service C-Arm 14 Image Control 2Nirav Barot100% (1)
- Viva Training - Hardware Pilot v8Document12 pagesViva Training - Hardware Pilot v8Army Anguiano0% (1)
- Matrice 300 RTK: User ManualDocument101 pagesMatrice 300 RTK: User ManualRandy Mucha V.No ratings yet
- Phantom 4 RTK User Manual v2.2 ENDocument75 pagesPhantom 4 RTK User Manual v2.2 ENOscar ChávezNo ratings yet
- Seare Girum Gebrehaweria Department of Electronics and Communication Engineering Mekelle Institute of TechnologyDocument9 pagesSeare Girum Gebrehaweria Department of Electronics and Communication Engineering Mekelle Institute of TechnologySeare GirumNo ratings yet
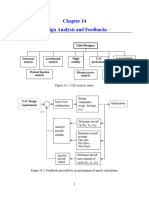
- CH 14 FiguresDocument10 pagesCH 14 FiguresamroushararaNo ratings yet
- Tips of Learning and PID ControlDocument42 pagesTips of Learning and PID ControlfinnandzestzuNo ratings yet
- B717 22 AUTOFLIGHT - InitialDocument85 pagesB717 22 AUTOFLIGHT - InitialA WongNo ratings yet
- Innovation Day PresentationDocument10 pagesInnovation Day PresentationCarlos Mella-RijoNo ratings yet
- Fin CS For Roll StabilisationDocument11 pagesFin CS For Roll Stabilisationsandeep kumar mandalNo ratings yet
- Hoosing The Flight ControllerDocument8 pagesHoosing The Flight ControllerMaxim KovalenkoNo ratings yet
- Lesson 02 Experimental Platform ConfigurationDocument61 pagesLesson 02 Experimental Platform Configurationsamiadem1099No ratings yet
- Fin CS For Roll StabilisationDocument11 pagesFin CS For Roll StabilisationSandeep MandalNo ratings yet
- Formation ICM: Pause DéjeunerDocument108 pagesFormation ICM: Pause DéjeunerMuhammad ShahzadNo ratings yet
- Pan and Tilt Scanner For ACTi Zoom Cameras 20110503 002Document7 pagesPan and Tilt Scanner For ACTi Zoom Cameras 20110503 002Le Viet ThanhNo ratings yet
- Map A7R Product Manual enDocument9 pagesMap A7R Product Manual enSlamet RiadiNo ratings yet
- Pilot Guide 006 08248 0003 - 3 PDFDocument34 pagesPilot Guide 006 08248 0003 - 3 PDFYuka ImaiNo ratings yet
- Individual Final Year Project Poster - Quadcopter Control With GesturesDocument1 pageIndividual Final Year Project Poster - Quadcopter Control With GesturesChandhann Ramchurn0% (1)
- Matrice 300 RTK: User ManualDocument100 pagesMatrice 300 RTK: User ManualOscar ChávezNo ratings yet
- Mavic 2 Manual PublicitarioDocument33 pagesMavic 2 Manual PublicitarioSergio PNo ratings yet
- ICRA Andrew MillerDocument24 pagesICRA Andrew MillerRajesh BhanushaliNo ratings yet
- ACCELERATE COMPUTER VISION WITH VPI 1.1Document23 pagesACCELERATE COMPUTER VISION WITH VPI 1.1Giancarlo VatalaroNo ratings yet
- Controlling PUMA Robot Arms With Programming LanguagesDocument131 pagesControlling PUMA Robot Arms With Programming LanguagesCmia PurdyNo ratings yet
- Design Document0Document37 pagesDesign Document0Raihan Farhan RamadhanNo ratings yet
- DroidInfo PDFDocument7 pagesDroidInfo PDFdilawer99No ratings yet
- 02 HummingbirdDocument36 pages02 Hummingbirdantenr100% (1)
- OV9281 MIPI Camera Module Datasheet v2Document6 pagesOV9281 MIPI Camera Module Datasheet v2BNo ratings yet
- 4GV632A50-1108Document20 pages4GV632A50-1108Waelghanii GhaniNo ratings yet
- 2.1 - AquilionCXL Biomed - PrinciplesDocument60 pages2.1 - AquilionCXL Biomed - Principlesthanh tong Tieu100% (2)
- Hbe-Robonova-Ai Ii PDFDocument4 pagesHbe-Robonova-Ai Ii PDFThichanon RomsaiyudNo ratings yet
- Foxtech Nimbus VTOL V2 For Mapping and Survey (X9D Combo) : User ManualDocument24 pagesFoxtech Nimbus VTOL V2 For Mapping and Survey (X9D Combo) : User ManualAdaNo ratings yet
- 6100 6200 Tractors Europe Edition IntroductionDocument16 pages6100 6200 Tractors Europe Edition Introductionceli gimNo ratings yet
- 5042D Tractor TREM IIIA Engine India Edition IntroductionDocument3 pages5042D Tractor TREM IIIA Engine India Edition Introductionmanne praveenNo ratings yet
- CSE 467 Embedded Computing Systems OverviewDocument28 pagesCSE 467 Embedded Computing Systems OverviewDurrNo ratings yet
- Parrot Productsheet Disco-pro-Ag enDocument8 pagesParrot Productsheet Disco-pro-Ag enGabriel Campuzano QuispeNo ratings yet
- Specification For Forward Collision Warning (FCW) : Model Name: UMD-RN01Document25 pagesSpecification For Forward Collision Warning (FCW) : Model Name: UMD-RN01a.anugrahNo ratings yet
- VT Inspect With BorescopeDocument54 pagesVT Inspect With BorescopeDodi SuhendraNo ratings yet
- Phantom 3: User ManualDocument59 pagesPhantom 3: User ManualBayu Yudha TopsurveyNo ratings yet
- Phantom 3: User ManualDocument27 pagesPhantom 3: User ManualkzhvcjbzuifgbhkdkhJVNo ratings yet
- Marex Os Iii: For A Safe Journey CatalogDocument102 pagesMarex Os Iii: For A Safe Journey CatalogfirdNo ratings yet
- 2158 5696 1 PBDocument8 pages2158 5696 1 PBBen AbdejalilNo ratings yet
- How-To-Extend-Flight-Time-And-Battery-Life-Of-Quadcopters-And-Industrial DronesDocument32 pagesHow-To-Extend-Flight-Time-And-Battery-Life-Of-Quadcopters-And-Industrial DronesgenmassaNo ratings yet
- Manual NIMBUS VTOLDocument23 pagesManual NIMBUS VTOLEwfa RamenNo ratings yet
- Aoc Le32h1465Document54 pagesAoc Le32h1465Marcelo MoreiraNo ratings yet
- 6820 6920 6920S Tractors Europe Edition IntroductionDocument15 pages6820 6920 6920S Tractors Europe Edition IntroductionDenis HernandezNo ratings yet
- 6506 6600 Tractors Europe Edition IntroductionDocument15 pages6506 6600 Tractors Europe Edition IntroductionCelioNo ratings yet
- To The Customer: 7530 Premium Tractor (European Edition)Document15 pagesTo The Customer: 7530 Premium Tractor (European Edition)Kamil KováčNo ratings yet
- M300 RTK User Manual en v1.4 1Document101 pagesM300 RTK User Manual en v1.4 1Šime KurtovNo ratings yet
- Vdocuments - MX CNC Controller Jy5300 v3 User GuideDocument41 pagesVdocuments - MX CNC Controller Jy5300 v3 User GuideInform7105No ratings yet
- DJI Phantom 3 Advanced User ManualDocument58 pagesDJI Phantom 3 Advanced User Manualmiguelgutierrez.perfiladosabNo ratings yet
- 955-0138 - v6.3 REV-M RED PS, WEAPON-EPIC-W Operation Guide1Document253 pages955-0138 - v6.3 REV-M RED PS, WEAPON-EPIC-W Operation Guide1Daniel HeroeNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Closed Circuit Television: CCTV Installation, Maintenance and OperationFrom EverandClosed Circuit Television: CCTV Installation, Maintenance and OperationRating: 3 out of 5 stars3/5 (2)
- The PIC Microcontroller: Your Personal Introductory CourseFrom EverandThe PIC Microcontroller: Your Personal Introductory CourseRating: 1 out of 5 stars1/5 (2)
- Bu 840112131Document8 pagesBu 840112131Endilie Yacob SuciptoNo ratings yet
- 5334 Problems Combinations & Games - Laszlo PolgarDocument1,082 pages5334 Problems Combinations & Games - Laszlo PolgarAndresNo ratings yet
- Logical Chess Move by Move - Irving Chernev PDFDocument128 pagesLogical Chess Move by Move - Irving Chernev PDFLuiz Felipe Rosa100% (3)
- Mulok Price List Print (Ipa 1)Document10 pagesMulok Price List Print (Ipa 1)Endilie Yacob SuciptoNo ratings yet
- Elbit Systems V5Document25 pagesElbit Systems V5arkamelviiNo ratings yet
- Sequoia Integration Manual enDocument4 pagesSequoia Integration Manual enDiego MarinNo ratings yet
- Modern Surveying For Modern RailwaysDocument34 pagesModern Surveying For Modern RailwaysManoj KumarNo ratings yet
- Drone Nations Al MacDocument49 pagesDrone Nations Al MacAlister William MacintyreNo ratings yet
- JCO Leads Joint C-sUAS Training and CapabilitiesDocument7 pagesJCO Leads Joint C-sUAS Training and CapabilitiessdffsdfNo ratings yet
- Xiang Yu 2010Document7 pagesXiang Yu 2010Jaime Luis Estanislao HonradoNo ratings yet
- Autonomous Aerial Mapping: Team Name: Game of Drones AuthorsDocument11 pagesAutonomous Aerial Mapping: Team Name: Game of Drones AuthorsNewMANNo ratings yet
- FM 44 85 Patriot Battalion and Battery Operations PDFDocument228 pagesFM 44 85 Patriot Battalion and Battery Operations PDFakms1982100% (1)
- Legal Issues Re: Use of Drones in U.S.Document25 pagesLegal Issues Re: Use of Drones in U.S.KING 5 News100% (1)
- Russia's unclear future for its UAV programmesDocument3 pagesRussia's unclear future for its UAV programmesTenshiJibrilNo ratings yet
- An FPGA Based Adaptive RealDocument9 pagesAn FPGA Based Adaptive Realshreya gowdaNo ratings yet
- Detecting Drones Using Machine LearningDocument36 pagesDetecting Drones Using Machine LearningSyed AliNo ratings yet
- Tactical Leaders HandbookDocument136 pagesTactical Leaders HandbookPATRIOTSKULLZ100% (2)
- Part 101 Micro Excluded RPA Operations Plain English GuideDocument52 pagesPart 101 Micro Excluded RPA Operations Plain English GuideDaniel KirkerNo ratings yet
- TaudexDocument29 pagesTaudexLauri PuumalainenNo ratings yet
- Plant Disease Detection Using Drones in PrecisionDocument21 pagesPlant Disease Detection Using Drones in PrecisionSandeep GaikwadNo ratings yet
- New Mechanical ProjectDocument10 pagesNew Mechanical Projectवैज्ञानिक बाबाNo ratings yet
- Balance Military 2015Document521 pagesBalance Military 2015any1097100% (1)
- National Security Vol 2 Issue 2 Essay JpsinghDocument12 pagesNational Security Vol 2 Issue 2 Essay JpsinghME20M015 Jaspreet SinghNo ratings yet
- L1 Adaptive ControlDocument139 pagesL1 Adaptive ControlDavid EstevesNo ratings yet
- Aaronia AARTOS DDS: Advanced Automatic RF Tracking and Observation SolutionDocument10 pagesAaronia AARTOS DDS: Advanced Automatic RF Tracking and Observation Solutionhasan bishNo ratings yet
- Data Fusion For The Apache Longbow ImplementationDocument12 pagesData Fusion For The Apache Longbow Implementationgm4984371No ratings yet
- Abstract Compiled ACRS 2017Document1,133 pagesAbstract Compiled ACRS 2017Anjusha Nair50% (2)
- Amazon TransportationDocument12 pagesAmazon TransportationVincent YatichNo ratings yet
- R50 Helicopter ManualDocument11 pagesR50 Helicopter ManualsanjuNo ratings yet
- SRS1C BrochureDocument2 pagesSRS1C BrochureSebastian RentschNo ratings yet
- Peer Graded Assignment Project Scope Statement PDFDocument3 pagesPeer Graded Assignment Project Scope Statement PDFRajan DodejaNo ratings yet
- DSP 1750 Digital Datasheet 0715Document2 pagesDSP 1750 Digital Datasheet 0715Lê Đình TiếnNo ratings yet
- 2020 DPWH Department OrdersDocument376 pages2020 DPWH Department OrdersFlash WingNo ratings yet
- Drone Competition Rule by ErovoutikaDocument5 pagesDrone Competition Rule by ErovoutikaArjey B. MangakoyNo ratings yet