You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 2 Differential Equation PDFDocument5 pages2 Differential Equation PDFPrashantKumarNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- National Hydro BestDocument2 pagesNational Hydro BestFaizal KhanNo ratings yet
- Complex Numbers: Z-Plane W-PlaneDocument3 pagesComplex Numbers: Z-Plane W-PlanePrashantKumarNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 7 Probability PDFDocument5 pages7 Probability PDFPrashantKumarNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- 4 Numerical Methods PDFDocument12 pages4 Numerical Methods PDFPrashantKumarNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- 1 - WWW - Mindvis.inDocument2 pages1 - WWW - Mindvis.inPrashantKumarNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Simulation of Assignment: No DataDocument10 pagesSimulation of Assignment: No DataPrashantKumarNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Solution Report For: Home My Test My ProfileDocument9 pagesSolution Report For: Home My Test My ProfileKRUSHNADEV JADHAVNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Materials Question From My BookDocument54 pagesMaterials Question From My BookRavinder Antil100% (6)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Drawability and Formability of Sheet Metals: R. Chandramouli Associate Dean-Research SASTRA University, Thanjavur-613 401Document13 pagesDrawability and Formability of Sheet Metals: R. Chandramouli Associate Dean-Research SASTRA University, Thanjavur-613 401mayank123100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Orange Peel / Doi: Small Structures Large StructuresDocument4 pagesOrange Peel / Doi: Small Structures Large StructuresPrashantKumarNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- FOB-Vibration Analysis PDFDocument89 pagesFOB-Vibration Analysis PDFovikbasuNo ratings yet
- Solution Report For: Mini GATE - 2017 CBT Test - 2 (ME, Set-B)Document17 pagesSolution Report For: Mini GATE - 2017 CBT Test - 2 (ME, Set-B)Sarabjit SinghNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Casting 2 by Mech Zone PDFDocument13 pagesCasting 2 by Mech Zone PDFPrashantKumarNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Appointment RecieptDocument3 pagesAppointment RecieptPrashantKumarNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- BDocument23 pagesBPrashantKumarNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- EspDocument26 pagesEspPrashantKumarNo ratings yet
- SolDocument23 pagesSolPrashantKumarNo ratings yet
- Jet, Submersible and Rotary PumpsDocument15 pagesJet, Submersible and Rotary Pumpsmssant100% (1)
- Internship Program Overview: Applies To Internship Program That Run From May-JulyDocument1 pageInternship Program Overview: Applies To Internship Program That Run From May-JulyPrashantKumarNo ratings yet
- 1 s2.0 S1877705814034742 MainDocument8 pages1 s2.0 S1877705814034742 MainPrashantKumarNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 01 Registrng PBF AUSL enDocument6 pages01 Registrng PBF AUSL enPrashantKumarNo ratings yet
- IsoDocument12 pagesIsoPrashantKumarNo ratings yet
- The Wisdom of Crowds by James SurowieckiDocument17 pagesThe Wisdom of Crowds by James SurowieckiPrashantKumarNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- FivDocument34 pagesFivPrashantKumarNo ratings yet
- CoppppxxxxxxxxxxxDocument2 pagesCoppppxxxxxxxxxxxPrashantKumarNo ratings yet
- Cover Letthver - SPDocument2 pagesCover Letthver - SPPrashantKumarNo ratings yet
- KumeDocument2 pagesKumePrashantKumarNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Comhvm Sys CoverDocument3 pagesComhvm Sys CoverPrashantKumarNo ratings yet
- Pope Mac Series AmpilifiersDocument9 pagesPope Mac Series AmpilifiersFikri HidayatNo ratings yet
- Bel Canto DAC2Document7 pagesBel Canto DAC2philaskNo ratings yet
- WESM WESMMNM 033 - Revision34Document55 pagesWESM WESMMNM 033 - Revision34Romel Cabrera IINo ratings yet
- Study of Ferroresonance PDFDocument11 pagesStudy of Ferroresonance PDFthyago_hcNo ratings yet
- 125 Kva 4k Kirloskar Koel Igreen Diesel GeneratorDocument6 pages125 Kva 4k Kirloskar Koel Igreen Diesel GeneratorAyan MajiNo ratings yet
- AB - AO - User Manual - EN - 02Document56 pagesAB - AO - User Manual - EN - 02diego ojedaNo ratings yet
- Pr1613adf PDFDocument2 pagesPr1613adf PDFhaerulamriNo ratings yet
- MicroelectronicsDocument101 pagesMicroelectronicsMac Arthur RamiloNo ratings yet
- Design and Working of FM TransmitterDocument6 pagesDesign and Working of FM TransmitterliyuNo ratings yet
- Solax Hybrid Inverter SK Tl5000e PDFDocument2 pagesSolax Hybrid Inverter SK Tl5000e PDFAlan FernandezNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 1931 - Datasheet Sta 3 STP 3 enDocument16 pages1931 - Datasheet Sta 3 STP 3 enSrdjanNo ratings yet
- Centro-Matic Automated Lubrication Systems: System ControlsDocument8 pagesCentro-Matic Automated Lubrication Systems: System ControlsAlex Rivera RiveraNo ratings yet
- Cble Protector WireDocument8 pagesCble Protector WireduvanNo ratings yet
- FP06P Data Sheet: FP06P-S1-04-32-NU-V-77A-110A-M-30Document1 pageFP06P Data Sheet: FP06P-S1-04-32-NU-V-77A-110A-M-30Ainayya alfatimahNo ratings yet
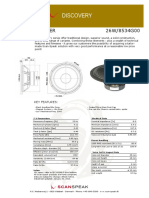
- Scanspeak Woofer 26w-8534g00Document2 pagesScanspeak Woofer 26w-8534g00Aldo DolceNo ratings yet
- Mains Interruption Counter With Indicator Circuit DiagramDocument6 pagesMains Interruption Counter With Indicator Circuit DiagramSelvy SalfitriNo ratings yet
- Engineering Physics Laboratory: Course ObjectivesDocument3 pagesEngineering Physics Laboratory: Course ObjectivesNaveenraj NNo ratings yet
- MCC - TRB - Eee - 2021 - Answer KeyDocument39 pagesMCC - TRB - Eee - 2021 - Answer KeysabilashNo ratings yet
- CBSE Class 12 Physics Frequently Asked Questions in ExaminationsDocument30 pagesCBSE Class 12 Physics Frequently Asked Questions in ExaminationsArshad KhanNo ratings yet
- Name ID - Set Time Reset TimeDocument5 pagesName ID - Set Time Reset TimeEliazer GonzalezNo ratings yet
- 2A Transformer Technical SpecificationDocument9 pages2A Transformer Technical SpecificationPraveen KumarNo ratings yet
- CS740 A8hDocument10 pagesCS740 A8hPaulo CardosoNo ratings yet
- F56 LightingDocument18 pagesF56 LightingnitrousnxNo ratings yet
- SEMIKRON DataSheet SKiM400GD126DM 23916530Document6 pagesSEMIKRON DataSheet SKiM400GD126DM 23916530anang suhermanNo ratings yet
- MNRE ALMM Dated 18.08.22Document43 pagesMNRE ALMM Dated 18.08.22Minal MimaniNo ratings yet
- W22 Smoke Extraction: Motor For Smoke Exhaustion African MarketDocument60 pagesW22 Smoke Extraction: Motor For Smoke Exhaustion African MarketAgustynho MagimbaNo ratings yet
- Problems: Section 8.3: The Response of A First Order Circuit To A Constant Input P8.3-1Document14 pagesProblems: Section 8.3: The Response of A First Order Circuit To A Constant Input P8.3-1Thiago BastosNo ratings yet
- Owner's Manual & Safety InstructionsDocument4 pagesOwner's Manual & Safety InstructionsDaniel CastroNo ratings yet
- EC-101 Electrical Sciences Electrical Sciences 3-1-0-8: Course InstructorsDocument13 pagesEC-101 Electrical Sciences Electrical Sciences 3-1-0-8: Course InstructorsMd ArifNo ratings yet
- Electrolux Washer Error Codes - WasherErrorCodesDocument16 pagesElectrolux Washer Error Codes - WasherErrorCodesIwan Akur100% (1)