You might also like
- 123Document4 pages123robin285No ratings yet
- Año de La Lucha Contra La Corrupcion y La ImpunidadDocument13 pagesAño de La Lucha Contra La Corrupcion y La Impunidadrobin285No ratings yet
- Tipo de AcerosDocument7 pagesTipo de Acerosrobin285No ratings yet
- Solicitud de Ampliacion de Cupo KevinDocument2 pagesSolicitud de Ampliacion de Cupo Kevinrobin285No ratings yet
- Informe de RenovablesDocument11 pagesInforme de Renovablesrobin285No ratings yet
- Armaduras de TechoDocument2 pagesArmaduras de Techorobin285No ratings yet
- Diseño de Losa Aligerada (Imprimir 06) PDFDocument5 pagesDiseño de Losa Aligerada (Imprimir 06) PDFrandyNo ratings yet
- Analisis Estructural IDocument51 pagesAnalisis Estructural IEdhinson Rafael Guevara Ruiz100% (1)
- Cap21 DISPOSICIONES ESPECIALES DE DISEÑO SISMICO - ACI318Document38 pagesCap21 DISPOSICIONES ESPECIALES DE DISEÑO SISMICO - ACI318pele123No ratings yet
- MNF 38,448,900.00 Muf 34,604,010.00 Muw 25,395,990.00 KW 1,780,240.00 ADocument23 pagesMNF 38,448,900.00 Muf 34,604,010.00 Muw 25,395,990.00 KW 1,780,240.00 Arobin285No ratings yet
- Analisis estructuralPPTDocument17 pagesAnalisis estructuralPPTrobin285No ratings yet
- Teoria de Diseno Por FlexionDocument15 pagesTeoria de Diseno Por Flexionrobin285No ratings yet
- Losas Wafle Examen 2aDocument9 pagesLosas Wafle Examen 2aEdwin CardenasNo ratings yet
- m3 MesDocument2 pagesm3 Mesrobin285No ratings yet
- Sistema Estructural: "Año de La Lucha Contra La Corrupción Y La Impunidad"Document3 pagesSistema Estructural: "Año de La Lucha Contra La Corrupción Y La Impunidad"robin285No ratings yet
- Estructuras de MaderasDocument20 pagesEstructuras de MaderasEdhinson Rafael Guevara RuizNo ratings yet
- Combinaciones Que Valen La PenaDocument1 pageCombinaciones Que Valen La Penarobin285No ratings yet
- EJERICIOS1Document9 pagesEJERICIOS1robin285No ratings yet
- Tema 10 SoldaduraDocument17 pagesTema 10 SoldaduraTeobaldo J. Dioses PerezNo ratings yet
- Analisis de CuadrosDocument10 pagesAnalisis de Cuadrosrobin285No ratings yet
- Formulas y Ejercicios ResusltosDocument9 pagesFormulas y Ejercicios Resusltosrobin285No ratings yet
- DrenajeDocument10 pagesDrenajerobin285No ratings yet
- 02-Ejercicios Sobre MaderaDocument2 pages02-Ejercicios Sobre MaderacleideNo ratings yet
- Diseño Tijeral-InicialDocument10 pagesDiseño Tijeral-InicialMarco Antonio Sanchez ColetoNo ratings yet
- Curriculm VitaeDocument1 pageCurriculm VitaeKevin Gonzales CastroNo ratings yet
- ARMADURAS2Document20 pagesARMADURAS2robin285No ratings yet
- Informe de ArmadurasDocument29 pagesInforme de ArmadurasKevin Gonzales CastroNo ratings yet
- Curriculm VitaeDocument1 pageCurriculm VitaeKevin Gonzales CastroNo ratings yet
- Informe de ArmadurasDocument29 pagesInforme de ArmadurasKevin Gonzales CastroNo ratings yet
- H2 - Cal 1 - Derivadas ImplicitasDocument1 pageH2 - Cal 1 - Derivadas ImplicitasMoises Garcia DurandNo ratings yet
- Los Cinco Postulados de EuclidesDocument5 pagesLos Cinco Postulados de EuclidesAndrea GonzalezNo ratings yet
- 2 - MruvDocument2 pages2 - MruvMaria Fernanda Bae Mamani MendozaNo ratings yet
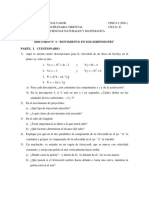
- Discusión N 3Document10 pagesDiscusión N 3Nixon MajanoNo ratings yet
- Arquitectura Efímera: Un Escenario Experimental para Las Construcciones Permanentes - Catálogo DigitDocument6 pagesArquitectura Efímera: Un Escenario Experimental para Las Construcciones Permanentes - Catálogo DigitIsmael Stanislav Perez IbarraNo ratings yet
- GeometriaDocument49 pagesGeometriaKenYi Orellana50% (2)
- Trabajo Grupal 01 - CaminosDocument13 pagesTrabajo Grupal 01 - CaminosDarwin Cano ValverdeNo ratings yet
- Unidad #06 - Geometría de Las MasasDocument21 pagesUnidad #06 - Geometría de Las MasasMato TavellaNo ratings yet
- FuncionesDocument164 pagesFuncionesMiguelRCNo ratings yet
- Teoría Del PellizcoDocument11 pagesTeoría Del PellizcoJomarNo ratings yet
- Hiperbola EXCELENTE (NXPowerLite)Document19 pagesHiperbola EXCELENTE (NXPowerLite)Xóchitl SotoNo ratings yet
- 3° - Geometría - U3Document26 pages3° - Geometría - U3MARIO ALONSO TRUJILLO RODRIGUEZNo ratings yet
- S03.s2 CAF1Document15 pagesS03.s2 CAF1Erik victor Anchivilca ZavaletaNo ratings yet
- Dificultades en La Orientación EspacialDocument4 pagesDificultades en La Orientación EspacialRosario Landa Galarza100% (1)
- Resumen ORTEGA VALCARCEL JOSE "Los Horizontes de La Geografia" en Los Horizontes de La Geografia Teoria de La Geografia Editorial Ariel 2000Document17 pagesResumen ORTEGA VALCARCEL JOSE "Los Horizontes de La Geografia" en Los Horizontes de La Geografia Teoria de La Geografia Editorial Ariel 2000mvpiendibene75% (4)
- Separata AngulosDocument4 pagesSeparata Angulos김강이원No ratings yet
- Apunte de CroquisDocument6 pagesApunte de CroquisJulieta Aymara PalaciosNo ratings yet
- Desarrollo Del Pensamiento Algebraico en Niños de Primero de Primaria.Document15 pagesDesarrollo Del Pensamiento Algebraico en Niños de Primero de Primaria.Cristina CarabaliNo ratings yet
- Sesión 10 MatematicasDocument28 pagesSesión 10 Matematicassebastiandrade0% (1)
- Ensayo La GlobalizaciónDocument7 pagesEnsayo La GlobalizaciónCarlos EnriqueNo ratings yet
- Aplicaciones de La Geometría Descriptiva A La MineríaDocument3 pagesAplicaciones de La Geometría Descriptiva A La MineríaAlbeiro HerreraNo ratings yet
- La Zaranda 8Document185 pagesLa Zaranda 8Reparacion Calefones Hugo ZerpaNo ratings yet
- Danza, Biografia de Rudolf V On Laban Y TECNICA de LA KINESFERADocument6 pagesDanza, Biografia de Rudolf V On Laban Y TECNICA de LA KINESFERADamon Lestat Báthory0% (1)
- Funciones Reales MatematicaDocument50 pagesFunciones Reales Matematicaender nabeaNo ratings yet
- 03 TriangulosDocument4 pages03 TriangulosNestor AQ0% (2)
- Movimiento Circular - TeoríaDocument3 pagesMovimiento Circular - TeoríaCarlos EnriqueNo ratings yet
- La Elipse y La HiperbolaDocument29 pagesLa Elipse y La Hiperbolagriv3rosNo ratings yet
- Introducción Al Pensamiento SistémicoDocument5 pagesIntroducción Al Pensamiento SistémicoGian Rengifo AkituariNo ratings yet
- Coordenadas GeográficasDocument9 pagesCoordenadas GeográficasKenlly FC JorkenNo ratings yet
- Ejercicios de Conos para Quinto de SecundariaDocument4 pagesEjercicios de Conos para Quinto de Secundarialeyner iván rodriguez lozanoNo ratings yet