You might also like
- 1.3 Text and Scrolling ViewsDocument19 pages1.3 Text and Scrolling ViewsAnser PashaNo ratings yet
- Problem-Solving Through Programming: First/Second Semester B.E. Degree ExaminationDocument2 pagesProblem-Solving Through Programming: First/Second Semester B.E. Degree ExaminationAnser PashaNo ratings yet
- Concepts and Techniques: Data MiningDocument81 pagesConcepts and Techniques: Data Miningnayanisateesh2805100% (1)
- Concepts and Techniques: Data MiningDocument101 pagesConcepts and Techniques: Data MiningJiyual MustiNo ratings yet
- Problem-Solving Through Programming: First/Second Semester B.E. Degree ExaminationDocument2 pagesProblem-Solving Through Programming: First/Second Semester B.E. Degree ExaminationAnser PashaNo ratings yet
- CG SyllabusDocument4 pagesCG SyllabusvijetaNo ratings yet
- 3.3 Using The Android Support LibrariesDocument25 pages3.3 Using The Android Support LibrariesAnser PashaNo ratings yet
- 2.3 Starting Activities With Implicit IntentsDocument35 pages2.3 Starting Activities With Implicit IntentsAnser PashaNo ratings yet
- 2.2 The Activity Lifecycle and Managing StateDocument38 pages2.2 The Activity Lifecycle and Managing StateAnser PashaNo ratings yet
- Is SchemeDocument6 pagesIs SchemeAnser PashaNo ratings yet
- DMS - Imp Questions - VTU ExamDocument10 pagesDMS - Imp Questions - VTU ExamAnser PashaNo ratings yet
- Cssyll18-19 DMSDocument2 pagesCssyll18-19 DMSAnser PashaNo ratings yet
- Lab 1Document10 pagesLab 1Anser PashaNo ratings yet
- Java Student Class and Stack ImplementationDocument10 pagesJava Student Class and Stack ImplementationAnser PashaNo ratings yet
- MAHE PHD Guidelines - Oct 2019Document14 pagesMAHE PHD Guidelines - Oct 2019Anser PashaNo ratings yet
- Photoshop CS5 Read MeDocument11 pagesPhotoshop CS5 Read Meali_mohammed_18No ratings yet
- Vtu PHD 2017 Regulation PDFDocument25 pagesVtu PHD 2017 Regulation PDFAnser PashaNo ratings yet
- Viii Semester Sa SyllabusDocument1 pageViii Semester Sa SyllabusAnser PashaNo ratings yet
- KirchoffLaws PhysicsDocument36 pagesKirchoffLaws PhysicsSandeep KhodweNo ratings yet
- BSTPGMDocument4 pagesBSTPGMAnser PashaNo ratings yet
- What Lucky Looks LikeDocument9 pagesWhat Lucky Looks LikeAnser PashaNo ratings yet
- Aed Unit3Document68 pagesAed Unit3Anser Pasha100% (1)
- Unit 2 Architectural Styles and Case Studies BooksparDocument43 pagesUnit 2 Architectural Styles and Case Studies BooksparAnser PashaNo ratings yet
- C Programing LabDocument3 pagesC Programing LabManasa Gowda100% (1)
- 2014 New CCP SyllabusDocument2 pages2014 New CCP SyllabusManasa GowdaNo ratings yet
- Scheme and Syllabus of Semesters III To VIII of B.E (With Effect From 2010-2011)Document10 pagesScheme and Syllabus of Semesters III To VIII of B.E (With Effect From 2010-2011)Mayur PipaliyaNo ratings yet
- 2014 New CCP SyllabusDocument2 pages2014 New CCP SyllabusManasa GowdaNo ratings yet
- Unit7-NAN 2Document38 pagesUnit7-NAN 2Anser PashaNo ratings yet
- Lab4 F12Document8 pagesLab4 F12Anser PashaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- w10g - Passivated Bridge RectifierDocument3 pagesw10g - Passivated Bridge Rectifierrudey18No ratings yet
- Comparing Bulk-Si FinFET and Gate-All-Around FETs For The 5 NM Technology NodeDocument9 pagesComparing Bulk-Si FinFET and Gate-All-Around FETs For The 5 NM Technology NodeHung Lung ChienNo ratings yet
- An-6076 On Semi Design and Application Guide of Bootstrap Circuit For High Voltage Gate Drive ICDocument15 pagesAn-6076 On Semi Design and Application Guide of Bootstrap Circuit For High Voltage Gate Drive ICalstafilovNo ratings yet
- Sample of Residential Load Computation For Power System AnalysisDocument4 pagesSample of Residential Load Computation For Power System AnalysisMarvin GagarinNo ratings yet
- Topic 11 Single Phase Transformer y Delta Conn.Document25 pagesTopic 11 Single Phase Transformer y Delta Conn.ANTHONETTE BERNABENo ratings yet
- Abu AliDocument60 pagesAbu Alijp2udhayaNo ratings yet
- IR2117 ApplicationDocument24 pagesIR2117 ApplicationBhaskar KharviNo ratings yet
- 140 HDocument7 pages140 HAlex CastilloNo ratings yet
- LM2950Document4 pagesLM2950gusguicorNo ratings yet
- Advances in Vector Control Ofac Motor Drives A Review PDFDocument24 pagesAdvances in Vector Control Ofac Motor Drives A Review PDFBook4AllNo ratings yet
- Interrupt or Ter Mom Agn É Tico SquaredDocument272 pagesInterrupt or Ter Mom Agn É Tico SquaredDaniel MendozaNo ratings yet
- ♤ Spare Part List (베트남) : No. Item Item (1) Item Code Model Name SpecDocument108 pages♤ Spare Part List (베트남) : No. Item Item (1) Item Code Model Name SpecXuân DuyNo ratings yet
- Experiment No 5 Single-Phase Current Transformer: ObjectiveDocument3 pagesExperiment No 5 Single-Phase Current Transformer: ObjectiveMr Hassan RazaNo ratings yet
- Foxboro Evo™ SCD6000 Wide Range Input Power Supply ModuleDocument8 pagesFoxboro Evo™ SCD6000 Wide Range Input Power Supply ModuleWisnu HartonoNo ratings yet
- High Input Voltage Buck-Boost Converter With 2A Switch CurrentDocument31 pagesHigh Input Voltage Buck-Boost Converter With 2A Switch Currentbarmircea10No ratings yet
- COC of Deye InverterDocument3 pagesCOC of Deye InverterDennis FielNo ratings yet
- On Electrical Transformer ManufacturingDocument15 pagesOn Electrical Transformer ManufacturingTanvi Gupta67% (6)
- AUTO Transformer Protection - ABBDocument5 pagesAUTO Transformer Protection - ABBகவி பாரதி முத்துசாமிNo ratings yet
- Submittal 16080.003.A - NETA Test FormsDocument34 pagesSubmittal 16080.003.A - NETA Test Formsirish sedilllNo ratings yet
- A Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationsDocument3 pagesA Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationslionpjrNo ratings yet
- Liquid Brochure PDFDocument16 pagesLiquid Brochure PDFRigeNo ratings yet
- Saudi Electricity Company: Eastern Operating Area Dammam, Saudi ArabiaDocument26 pagesSaudi Electricity Company: Eastern Operating Area Dammam, Saudi Arabiasrigirisetty208No ratings yet
- Conduit Fill GuideDocument6 pagesConduit Fill GuideKosala KamburadeniyaNo ratings yet
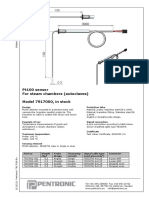
- Pentronic 7917000 enDocument2 pagesPentronic 7917000 ensalahNo ratings yet
- GW - HT 1500V - User Manual-EN (01-57) (31-57)Document27 pagesGW - HT 1500V - User Manual-EN (01-57) (31-57)Marcos GomesNo ratings yet
- SPW-UR253GHN56 SPW-UR253GHN56 SPW-UR253GHN56 SPW-UR253GHN56: Parts List Parts List Parts List Parts ListDocument4 pagesSPW-UR253GHN56 SPW-UR253GHN56 SPW-UR253GHN56 SPW-UR253GHN56: Parts List Parts List Parts List Parts ListDavid Lemos SanchezNo ratings yet
- RC Snubber Circuit Design For Thyristor Using Turn-Off Model in PspiceDocument5 pagesRC Snubber Circuit Design For Thyristor Using Turn-Off Model in PspiceIjsrnet EditorialNo ratings yet
- Capacitor Voltage TransformerDocument10 pagesCapacitor Voltage TransformerGurwndrSandhu100% (1)
- Basiccharge Ev Ftu Superfast Data Sheet 028413Document2 pagesBasiccharge Ev Ftu Superfast Data Sheet 028413Cojoc Constantin-CosminNo ratings yet