You might also like
- 8086 MicroprocessorDocument21 pages8086 MicroprocessorPinki KumariNo ratings yet
- Chapter 3: Intel 8086Document135 pagesChapter 3: Intel 8086singhrps8483% (6)
- EMU8086 SolutionsDocument10 pagesEMU8086 SolutionsNaga Venkat0% (1)
- Emu8086 TutorialDocument9 pagesEmu8086 Tutoriallordsuggs0% (1)
- 8086 ProgramingDocument29 pages8086 ProgramingSumant Arora0% (1)
- Unit - 2 Central Processing Unit TOPIC 1: General Register OrganizationDocument13 pagesUnit - 2 Central Processing Unit TOPIC 1: General Register OrganizationRam Prasad GudiwadaNo ratings yet
- Assembly Language: by - Prof. Prithi K.SDocument67 pagesAssembly Language: by - Prof. Prithi K.SprithiksNo ratings yet
- Sample Exam QuestionsDocument9 pagesSample Exam Questionssomeguyinoz100% (1)
- Microprocessors 8086 (Notes)Document29 pagesMicroprocessors 8086 (Notes)Aravindha BhatNo ratings yet
- 4 Bit Cpu ReportDocument16 pages4 Bit Cpu ReportHarshil LodhiNo ratings yet
- 8085 SimulatorDocument2 pages8085 Simulatorradke42626No ratings yet
- Chapter 2: Intel 8088/8086 MicroprocessorsDocument37 pagesChapter 2: Intel 8088/8086 MicroprocessorsNgọc NinhNo ratings yet
- Lab 1Document7 pagesLab 1Tanjila Islam Ritu 1811017642No ratings yet
- Advanced Microprocessor PDFDocument1 pageAdvanced Microprocessor PDFAmish Tankariya50% (2)
- 8086 CpuDocument89 pages8086 CpuBharathi MolletiNo ratings yet
- Assebly Lab PrintDocument19 pagesAssebly Lab PrintPRATIK_DARBHE100% (2)
- Microprocessor and InterfacingDocument25 pagesMicroprocessor and InterfacingEr Bhavik PatelNo ratings yet
- Exercise 1 - Analog To Digital Conversion PointDocument5 pagesExercise 1 - Analog To Digital Conversion PointJoey DumandanNo ratings yet
- Instruction Set 8085Document19 pagesInstruction Set 8085internetwealthdonNo ratings yet
- Assignment 1Document4 pagesAssignment 1ashar565No ratings yet
- SYNAPSE Techno Design Innovation PVT LTDDocument47 pagesSYNAPSE Techno Design Innovation PVT LTDcobalt_1223No ratings yet
- Features of 8086Document31 pagesFeatures of 8086Ngaa SiemensNo ratings yet
- 8086 Programs-Semester 4Document40 pages8086 Programs-Semester 4Shashank M ChanmalNo ratings yet
- Compilation 1,2,3Document7 pagesCompilation 1,2,3Kharolina BautistaNo ratings yet
- ApplicationsDocument44 pagesApplicationsmerinjose123100% (1)
- Lecture05 - 8086 AssemblyDocument43 pagesLecture05 - 8086 Assemblytesfu zewduNo ratings yet
- The Acorn RISC Machine (ARM)Document12 pagesThe Acorn RISC Machine (ARM)Vikas SinghNo ratings yet
- Computer Architecture and Parallel ProcessingDocument1 pageComputer Architecture and Parallel ProcessingRohith RajNo ratings yet
- Chapter-5: Assembly Language Programming Using 8086 (16 Marks)Document55 pagesChapter-5: Assembly Language Programming Using 8086 (16 Marks)PRABHAKAR MORENo ratings yet
- RISC Vs CISC, Harvard V/s Van NeumannDocument35 pagesRISC Vs CISC, Harvard V/s Van NeumannVRAJ PATELNo ratings yet
- Question BAnk OF Computer ArchitectureDocument6 pagesQuestion BAnk OF Computer Architecturearchie_ashley50% (2)
- Emu8086 PDFDocument82 pagesEmu8086 PDFzero00067% (3)
- Micro ProcessorDocument85 pagesMicro Processorkishore532No ratings yet
- Computer Architecture 2 MarksDocument32 pagesComputer Architecture 2 MarksArchanavgs0% (1)
- Block Diagram of Intel 8086Document5 pagesBlock Diagram of Intel 8086Ritesh SinghNo ratings yet
- Interfacing ADC With 8051Document15 pagesInterfacing ADC With 8051Pavan Kumar N100% (1)
- Group 6 Cpu Design PresentationDocument50 pagesGroup 6 Cpu Design PresentationFerry AriNo ratings yet
- 8086 MicroprocessorDocument48 pages8086 MicroprocessorRajaganapathi RajappanNo ratings yet
- Question: Using Arm Assembly Language (Arm Cortex-M MicrocontrollDocument2 pagesQuestion: Using Arm Assembly Language (Arm Cortex-M MicrocontrollMustafa KhudhairNo ratings yet
- Assembly Language Lab #1: Islamic University of Gaza Computer Engineering DepartmentDocument8 pagesAssembly Language Lab #1: Islamic University of Gaza Computer Engineering DepartmentAllen Kyn Bacolod BundaNo ratings yet
- 8086 MicroprocessorDocument37 pages8086 MicroprocessorMahesh krishNo ratings yet
- Microprocessor 8086 Lab MannualDocument86 pagesMicroprocessor 8086 Lab MannualShahana Enjoying LyfNo ratings yet
- Assembly Lab2Document10 pagesAssembly Lab2DaWheng Vargas100% (1)
- 8086 ManualDocument45 pages8086 ManualGarima SinghalNo ratings yet
- Chapter 3: Computer Instructions: ObjectivesDocument7 pagesChapter 3: Computer Instructions: ObjectivesSteffany RoqueNo ratings yet
- Organization of Intel 8086Document10 pagesOrganization of Intel 8086Ashok ChakriNo ratings yet
- System Software NotesDocument97 pagesSystem Software NotesTheerthesh Gowda100% (1)
- 8086 Microprocessor Architecture 2Document30 pages8086 Microprocessor Architecture 2Rajkumar ArumairajNo ratings yet
- Microprocesser AssignmentDocument15 pagesMicroprocesser AssignmentMukul RanaNo ratings yet
- 8086 ArchitectureDocument7 pages8086 Architectureshahid aliNo ratings yet
- MPMC (r15) Unit 1bDocument89 pagesMPMC (r15) Unit 1bRAVICHANDRA KILARUNo ratings yet
- Microprocessor ArchitectureDocument83 pagesMicroprocessor Architectureसुनील ढिल्लोNo ratings yet
- 8086 Microprocessor ArchitectureDocument31 pages8086 Microprocessor ArchitectureLeeza AnandNo ratings yet
- Chapter 2: 16 Bit Microprocessor: 8086 (24 M) : Salient Features of 8086 MicroprocessorDocument12 pagesChapter 2: 16 Bit Microprocessor: 8086 (24 M) : Salient Features of 8086 MicroprocessorsharoofyNo ratings yet
- Microprocessor Notes For JNTUH ECE IIIDocument82 pagesMicroprocessor Notes For JNTUH ECE IIIManoj KollamNo ratings yet
- Intel Microprocessor: Srinivas - PeralaDocument31 pagesIntel Microprocessor: Srinivas - PeralaJamie SchultzNo ratings yet
- 8086 Microprocessor ArchitectureDocument30 pages8086 Microprocessor ArchitectureprasadapawaskarNo ratings yet
- Chapter 2: 8086 Microprocessor and Its ArchitectureDocument19 pagesChapter 2: 8086 Microprocessor and Its ArchitectureLens NewNo ratings yet
- Significance of QueueDocument6 pagesSignificance of QueueJun Alfred Alba100% (1)
- Venkat Es Has To TramDocument3 pagesVenkat Es Has To TramVenkata Rajkumar ChNo ratings yet
- Watts Per Square MeterDocument2 pagesWatts Per Square MeterVenkata Rajkumar ChNo ratings yet
- Electrical Skills (Eepw2241) : DC MotorsDocument6 pagesElectrical Skills (Eepw2241) : DC MotorsVenkata Rajkumar ChNo ratings yet
- Single Phase Motor Controller For Washing Machine ApplicationDocument3 pagesSingle Phase Motor Controller For Washing Machine ApplicationVenkata Rajkumar ChNo ratings yet
- Acc-En (Sci) : Analogue Multi-Sensor With SCIDocument1 pageAcc-En (Sci) : Analogue Multi-Sensor With SCIuygar öztürkNo ratings yet
- Handover GSMDocument33 pagesHandover GSMShashank Prajapati0% (1)
- Ground-Fault Circuit-Interrupters UL 943: 1 ScopeDocument1 pageGround-Fault Circuit-Interrupters UL 943: 1 Scopedanielliram993No ratings yet
- Communication Systems: Building Utilities 2Document53 pagesCommunication Systems: Building Utilities 2John Lloyd AgapitoNo ratings yet
- LiftUnit7 DocumentationDocument44 pagesLiftUnit7 Documentationangela1590No ratings yet
- JCB EcuDocument1 pageJCB EcuMark EsguerraNo ratings yet
- LCDDocument11 pagesLCDNikhith Reddy100% (1)
- 4.5G Solution OverviewDocument23 pages4.5G Solution OverviewTelworks RSNo ratings yet
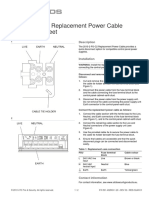
- 501-402803-1-20 (EN) R02 2010-2-PS-C2 Replacement Power Cable Installation SheetDocument2 pages501-402803-1-20 (EN) R02 2010-2-PS-C2 Replacement Power Cable Installation SheetDanNo ratings yet
- AIPHONE GH-1AD SpecDocument3 pagesAIPHONE GH-1AD SpecFeby ChristinaNo ratings yet
- AD2006+ BASE Brochure PDFDocument1 pageAD2006+ BASE Brochure PDFRodolfo TorresNo ratings yet
- 2SD863Document5 pages2SD863FeryBaleaNo ratings yet
- MC InstallGuide PDFDocument56 pagesMC InstallGuide PDFrqodriNo ratings yet
- S-CLASSIC E SeriesDocument9 pagesS-CLASSIC E SeriesKetut Wahyu WidyanaNo ratings yet
- Bose Designmax DM3CDocument4 pagesBose Designmax DM3CAmit KidechaNo ratings yet
- End Semester Examination: January, 2022 Digital Electronics and Computer OrganizationDocument3 pagesEnd Semester Examination: January, 2022 Digital Electronics and Computer OrganizationFFFNo ratings yet
- On-Board Diagnostic (Immobilizer System)Document5 pagesOn-Board Diagnostic (Immobilizer System)pavel35No ratings yet
- SP6-8K Handy Ultra user manual - КопиеDocument78 pagesSP6-8K Handy Ultra user manual - КопиеYordan StoyanovNo ratings yet
- Introduction To DC GeneratorDocument119 pagesIntroduction To DC GeneratorFaraz HussainNo ratings yet
- FKG2S We Brochure enDocument2 pagesFKG2S We Brochure enMichael ManzanoNo ratings yet
- Schedule - Deep FreezersDocument10 pagesSchedule - Deep FreezersHamdiyya AbdullahiNo ratings yet
- Indian RailwayDocument37 pagesIndian RailwayAnonymous 3BGW2XaXZeNo ratings yet
- Slewing Controller SpecificationDocument7 pagesSlewing Controller SpecificationMohamed ElsayedNo ratings yet
- Leica Sr20: User ManualDocument32 pagesLeica Sr20: User ManualathalNo ratings yet
- View APGENCO AE Exam Pattern For ExamDocument3 pagesView APGENCO AE Exam Pattern For ExamViswanath NtNo ratings yet
- Power Supply and Ground Circuit Power Supply and Ground Circuit Wiring DiagramDocument9 pagesPower Supply and Ground Circuit Power Supply and Ground Circuit Wiring DiagramDavid QuispeNo ratings yet
- Paper Review 1234Document18 pagesPaper Review 1234Gedef YirgalemNo ratings yet
- Satsearch Uqkij4 Honeywell Aero S Band TT C Transceiver STC ms03Document2 pagesSatsearch Uqkij4 Honeywell Aero S Band TT C Transceiver STC ms03LêTiếnDungNo ratings yet
- TC58NVG0S3ETA00Document65 pagesTC58NVG0S3ETA00Freddy AmayaNo ratings yet
- BateriaDocument17 pagesBateriaGabriel MarzolaNo ratings yet