You might also like
- Earthquake Resistant Design by Seismic Base Isolation - Dr. R.S. JangidDocument64 pagesEarthquake Resistant Design by Seismic Base Isolation - Dr. R.S. JangidAdrian Emmanuel ValeNo ratings yet
- Bending Stresses in BeamDocument29 pagesBending Stresses in BeamilhammkaNo ratings yet
- Design of Concrete Beam StructuresDocument26 pagesDesign of Concrete Beam StructuresVRKVRK10No ratings yet
- Important RCC Questions-Short and LongDocument15 pagesImportant RCC Questions-Short and LongmailjoelsamuelNo ratings yet
- Plastic analysis of frame structuresDocument65 pagesPlastic analysis of frame structuresgirma kebedeNo ratings yet
- Plastic Section Moduli For I.S. Rolled Steel Beam Sections Zpy About Y-Y AxisDocument8 pagesPlastic Section Moduli For I.S. Rolled Steel Beam Sections Zpy About Y-Y AxisIJRASETPublicationsNo ratings yet
- Example Problems For Tension Members SteelDocument5 pagesExample Problems For Tension Members SteelTesfa HunderaNo ratings yet
- Torsion Torsional Shear Stress DistributionDocument18 pagesTorsion Torsional Shear Stress DistributionEhsan WasimNo ratings yet
- 02 - Design of Steel Tension MembersDocument15 pages02 - Design of Steel Tension MembersMayur PatelNo ratings yet
- CE6702-Prestressed Concrete Structures - 2013 - Regulation PDFDocument13 pagesCE6702-Prestressed Concrete Structures - 2013 - Regulation PDFShibin VargheseNo ratings yet
- Revision of IS 456 & IS 1343 - SummaryDocument3 pagesRevision of IS 456 & IS 1343 - Summaryshiv paa0% (1)
- Shear PropertiesDocument37 pagesShear Propertiestedmer1No ratings yet
- Concrete Slab Design - Aci 318Document4 pagesConcrete Slab Design - Aci 318Kutty MansoorNo ratings yet
- Steel Design Handout Chapters 1-3Document124 pagesSteel Design Handout Chapters 1-3Kevin Banez100% (1)
- CEN 308 Pre Stressed Concrete ModDocument73 pagesCEN 308 Pre Stressed Concrete ModSanchit KumarNo ratings yet
- Tension Member Design and TypesDocument6 pagesTension Member Design and TypesbaizubirajiNo ratings yet
- RCC Most Important Questions 3-1Document2 pagesRCC Most Important Questions 3-1Babu Sundararaman100% (1)
- Investigation of Omo River Bridge CollapseDocument5 pagesInvestigation of Omo River Bridge Collapseambachew abebeNo ratings yet
- Introduction To Plate Girder DesignDocument5 pagesIntroduction To Plate Girder DesignChe' SmitNo ratings yet
- Poisson'S Ratio Biaxial and Triaxial DeformationDocument8 pagesPoisson'S Ratio Biaxial and Triaxial DeformationRyan Jhay YangNo ratings yet
- Chapter 2 Literature ReviewDocument10 pagesChapter 2 Literature ReviewSharan BvpNo ratings yet
- Materials Engineering: Pangasinan State University Urdaneta Campus Mechanical Engineering DepartmentDocument7 pagesMaterials Engineering: Pangasinan State University Urdaneta Campus Mechanical Engineering DepartmentiamjemahNo ratings yet
- Local buckling classificationDocument10 pagesLocal buckling classificationHaya BakerNo ratings yet
- Lecture 5-LSD-Design of One Way SlabDocument11 pagesLecture 5-LSD-Design of One Way SlabMarkos DanielNo ratings yet
- Asian Journal of Civil Engineering-Pushover Analysis of Reinforced Concrete FrameDocument9 pagesAsian Journal of Civil Engineering-Pushover Analysis of Reinforced Concrete FrameFady W. IskanderNo ratings yet
- Ae 331 Laboratory Report - 4Document4 pagesAe 331 Laboratory Report - 4Apoorv Agarwal100% (2)
- Reinforced Concrete Shear Design PrinciplesDocument27 pagesReinforced Concrete Shear Design PrinciplesFekadu DebelaNo ratings yet
- Purlin and Roof DesignDocument4 pagesPurlin and Roof DesignErald PeriaNo ratings yet
- Theory of Elasticity and Plasticity for Mechanical EngineeringDocument12 pagesTheory of Elasticity and Plasticity for Mechanical EngineeringVinayak UntwaleNo ratings yet
- Unit-I Thin Plate Theory, Structural InstabilityDocument78 pagesUnit-I Thin Plate Theory, Structural InstabilityNirav LakhaniNo ratings yet
- Week 5 Assignment SolutionDocument2 pagesWeek 5 Assignment Solutionamin alzuraikiNo ratings yet
- Prestressed Concrete Design Course OutlinesDocument48 pagesPrestressed Concrete Design Course Outlinesaizaz ahmadNo ratings yet
- New Microsoft Office Word DocumentDocument3 pagesNew Microsoft Office Word DocumentRemya R. KumarNo ratings yet
- CE 3155 Structural Analysis Influence lines for statically determinate structures II maximumDocument17 pagesCE 3155 Structural Analysis Influence lines for statically determinate structures II maximumSteven KuaNo ratings yet
- Introduction To Beams: Part ADocument49 pagesIntroduction To Beams: Part AMorad AJNo ratings yet
- Study of Metamaterial Parameters using Retrieval MethodDocument18 pagesStudy of Metamaterial Parameters using Retrieval Methodneetu kumariNo ratings yet
- Performance of Concrete Column With GFRP Rebar Under Axial LoadingDocument6 pagesPerformance of Concrete Column With GFRP Rebar Under Axial LoadingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- IOP Conference Series: Earth and Environmental Science Post Pouring Zone Raft Foundation TechDocument5 pagesIOP Conference Series: Earth and Environmental Science Post Pouring Zone Raft Foundation TechlouiNo ratings yet
- Beam ColumnsDocument21 pagesBeam ColumnsSherif Mohamed Ibrahim100% (1)
- 6.design of Connections in Steel Building ConstructionDocument50 pages6.design of Connections in Steel Building ConstructionNovember RainNo ratings yet
- Advanced Mechanics of Solids - Question SetDocument3 pagesAdvanced Mechanics of Solids - Question SetAshish ZachariahNo ratings yet
- Effect of Lathe Waste Review 1Document22 pagesEffect of Lathe Waste Review 1dreamboy87No ratings yet
- Steel Connection DesignDocument4 pagesSteel Connection Designpaul machariaNo ratings yet
- Pre Stressed Concrete 18Cv641: Topic: Magnels MethodDocument14 pagesPre Stressed Concrete 18Cv641: Topic: Magnels MethodShobhaNo ratings yet
- RPT Unit2Document180 pagesRPT Unit2MJ Sharon WilsonNo ratings yet
- Torsion Design of Prestressed ConcreteDocument20 pagesTorsion Design of Prestressed ConcreteDr. M.V.Krishna RaoNo ratings yet
- Advanced Design of Concrete StructuresDocument24 pagesAdvanced Design of Concrete StructuresVarun. hrNo ratings yet
- Moment Redistribution in BeamsDocument12 pagesMoment Redistribution in BeamsChukwuka WayemeruNo ratings yet
- Simple Bridges NicholsonDocument94 pagesSimple Bridges Nicholsonfarhaad shaikNo ratings yet
- 2.2.design of Member in CompressionDocument12 pages2.2.design of Member in CompressionWilfharry billyNo ratings yet
- Introduction to Prestressed Concrete BasicsDocument84 pagesIntroduction to Prestressed Concrete BasicsArhamNo ratings yet
- RCC Design 3/7Document18 pagesRCC Design 3/7Nandan Anil GaikwadNo ratings yet
- Plant Layout 1Document8 pagesPlant Layout 1shawar69No ratings yet
- BEAMS, SLABS, STAIRS LIMIT STATE DESIGNDocument10 pagesBEAMS, SLABS, STAIRS LIMIT STATE DESIGNYAZHININo ratings yet
- ThesisDocument362 pagesThesisajayNo ratings yet
- Advances in Plasticity 1989: Proceedings of Plasticity '89, the Second International Symposium on Plasticity and Its Current ApplicationFrom EverandAdvances in Plasticity 1989: Proceedings of Plasticity '89, the Second International Symposium on Plasticity and Its Current ApplicationAkhtar S. KhanNo ratings yet
- Gate Best QuestionsDocument17 pagesGate Best QuestionsAnmolKumarNo ratings yet
- Shear Force and Bending MomentDocument17 pagesShear Force and Bending MomentAli HassenNo ratings yet
- Mechanical Engineering Stress AnalysisDocument46 pagesMechanical Engineering Stress AnalysisAudrey TuNo ratings yet
- MECH 305 Lab Q1 Beam Cross Section Moments of InertiaDocument1 pageMECH 305 Lab Q1 Beam Cross Section Moments of Inertiajohnvchristy7No ratings yet
- 2 Body Abrasion TesterDocument5 pages2 Body Abrasion Testerjohnvchristy7No ratings yet
- Characterization and Mechanical Properties of - Al2O3 Particle ReDocument48 pagesCharacterization and Mechanical Properties of - Al2O3 Particle Rejohnvchristy7No ratings yet
- Analysis of Stress and Strain Ch4-IDocument40 pagesAnalysis of Stress and Strain Ch4-Ijohnvchristy7No ratings yet
- Dry Sliding Wear Behaviour of A Conventional and Recycled HighDocument5 pagesDry Sliding Wear Behaviour of A Conventional and Recycled Highjohnvchristy7No ratings yet
- Mechanical and Corrosion Properties of AZ31 Magnesium Alloy Repeatedly Recycled by Hot ExtrusionDocument7 pagesMechanical and Corrosion Properties of AZ31 Magnesium Alloy Repeatedly Recycled by Hot Extrusionjohnvchristy7No ratings yet
- TheHandbookExcerpts DoneDocument20 pagesTheHandbookExcerpts Donetechno_guitaristNo ratings yet
- Thermal Spray Coating Tribological AnalysisDocument1 pageThermal Spray Coating Tribological Analysisjohnvchristy7No ratings yet
- Calorific ValueDocument1 pageCalorific Valuejohnvchristy7No ratings yet
- Tribological ParametersDocument5 pagesTribological Parametersjohnvchristy7No ratings yet
- Mechanical and Tribological Analysis of Thermal Spray Coating With A Dispersion of Solid Lubricant ParticlesDocument2 pagesMechanical and Tribological Analysis of Thermal Spray Coating With A Dispersion of Solid Lubricant Particlesjohnvchristy7No ratings yet
- Five Point Someone1 PDFDocument153 pagesFive Point Someone1 PDFIonut MihaiNo ratings yet
- Jane EyreDocument767 pagesJane Eyrejohnvchristy7No ratings yet
- PongamDocument2 pagesPongamjohnvchristy7No ratings yet
- 03lubrication and CoolingDocument46 pages03lubrication and Coolingjohnvchristy7No ratings yet
- Christian Song BookDocument188 pagesChristian Song BookjosefrancesNo ratings yet
- Uponor PEX Plumbing Solutions GuideDocument73 pagesUponor PEX Plumbing Solutions GuideMaxmore Karumamupiyo100% (1)
- Amino Acid For NeonateDocument13 pagesAmino Acid For NeonateHerti PutriNo ratings yet
- C7015 Infrarroja PDFDocument16 pagesC7015 Infrarroja PDFAlfredo Mitzi HernandezNo ratings yet
- PWS&PQRDocument1 pagePWS&PQRkuppiliramaNo ratings yet
- ALM Refrigeration Air DryerDocument34 pagesALM Refrigeration Air DryerJunaid AhmedNo ratings yet
- Compressed Air SystemDocument29 pagesCompressed Air Systemsk sajidNo ratings yet
- 04 - Spektroskopi UV-Vis - 3Document16 pages04 - Spektroskopi UV-Vis - 3muktadi-amri-8721No ratings yet
- Nickel CobaltDocument8 pagesNickel CobaltSunnyNo ratings yet
- Quality of Jelly Candy Made of Acid-Thinned Starch Added With Different Non-Starch PolysaccharidesDocument9 pagesQuality of Jelly Candy Made of Acid-Thinned Starch Added With Different Non-Starch PolysaccharidesjeffersonNo ratings yet
- EIFS performance standardsDocument40 pagesEIFS performance standardsRyan ClarkeNo ratings yet
- Sa 789 PDFDocument8 pagesSa 789 PDFsergioprybyszNo ratings yet
- NRAC Publication No. 170 An Introduction To Water Chemistry in Freshwater AquacultureDocument4 pagesNRAC Publication No. 170 An Introduction To Water Chemistry in Freshwater AquacultureSk RajNo ratings yet
- CT TPDocument5 pagesCT TPcesarchiletNo ratings yet
- Streeter-Phelps equation for predicting dissolved oxygen levelsDocument7 pagesStreeter-Phelps equation for predicting dissolved oxygen levelsAditya SheoranNo ratings yet
- Acid Base SaltMay 24, 2023Document6 pagesAcid Base SaltMay 24, 2023Archi SamantaraNo ratings yet
- 01-02. The Chemical Context of LifeDocument4 pages01-02. The Chemical Context of LifeDaniel Angelo MiradorNo ratings yet
- APPENDIX B Filler Metal Comparison Chart ABS-AWSDocument3 pagesAPPENDIX B Filler Metal Comparison Chart ABS-AWSplkv100% (1)
- David Yu Zhang - Dynamic DNA Strand Displacement CircuitsDocument290 pagesDavid Yu Zhang - Dynamic DNA Strand Displacement CircuitsCogsmsNo ratings yet
- Terluran GP-22: Acrylonitrile Butadiene Styrene (ABS)Document3 pagesTerluran GP-22: Acrylonitrile Butadiene Styrene (ABS)Mahdi VolgarNo ratings yet
- Cutting Tools TypeDocument3 pagesCutting Tools TypeneurraNo ratings yet
- Third Quarter Science 8: Content StandardDocument19 pagesThird Quarter Science 8: Content StandardGypsie Ann Pacon100% (1)
- Project Report On Activated Carbon (Granular and Powder)Document9 pagesProject Report On Activated Carbon (Granular and Powder)EIRI Board of Consultants and Publishers100% (1)
- Torqueo Pikotek PDFDocument4 pagesTorqueo Pikotek PDFjast111100% (1)
- GDocument3 pagesGjeas grejoy andrewsNo ratings yet
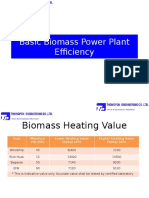
- Basic Biomass Power Plant EfficiencyDocument12 pagesBasic Biomass Power Plant EfficiencyPichai ChaibamrungNo ratings yet
- Listening ComprehensionDocument3 pagesListening ComprehensionLiz GilmoreNo ratings yet
- ICSE Biology Exam 2021Document7 pagesICSE Biology Exam 2021Sarthac JainNo ratings yet
- OEP TopicsDocument2 pagesOEP TopicsChemical Engg.No ratings yet
- OTC 25062-MS-Dr MuzDocument5 pagesOTC 25062-MS-Dr Muzazmi68No ratings yet
- Lecture Notes - Chem 16 LE3Document8 pagesLecture Notes - Chem 16 LE3Alexander Gordon InesNo ratings yet