You might also like
- RM PDFDocument1 pageRM PDFTalha YousufNo ratings yet
- Project ReportDocument1 pageProject ReportTalha YousufNo ratings yet
- Robot Mechanics and Control RIME-811: Dr. Hasan SajidDocument34 pagesRobot Mechanics and Control RIME-811: Dr. Hasan SajidTalha YousufNo ratings yet
- Literature Search On Hybrid Brain Computer Interface Using EEG and fNIRSDocument10 pagesLiterature Search On Hybrid Brain Computer Interface Using EEG and fNIRSTalha YousufNo ratings yet
- Data SetDocument1,206 pagesData SetTalha YousufNo ratings yet
- Foundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Document6 pagesFoundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Talha YousufNo ratings yet
- Binomial Distribution and ApplicationsDocument1 pageBinomial Distribution and ApplicationsTalha YousufNo ratings yet
- SVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneDocument13 pagesSVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneTalha YousufNo ratings yet
- Arduino TimersDocument31 pagesArduino TimersTalha YousufNo ratings yet
- CourseraProgWeek1Instruction PDFDocument2 pagesCourseraProgWeek1Instruction PDFTalha YousufNo ratings yet
- Time and Motion: Dr. Hasan SajidDocument33 pagesTime and Motion: Dr. Hasan SajidTalha YousufNo ratings yet
- Time and Motion: Dr. Hasan SajidDocument36 pagesTime and Motion: Dr. Hasan SajidTalha YousufNo ratings yet
- Bayesian Nonparametrics and The Probabilistic Approach To ModellingDocument27 pagesBayesian Nonparametrics and The Probabilistic Approach To ModellingTalha YousufNo ratings yet
- Chapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumDocument11 pagesChapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumTalha YousufNo ratings yet
- Support Vector Machines PDFDocument37 pagesSupport Vector Machines PDFTalha YousufNo ratings yet
- How Do I Choose A Graduate SchoolDocument2 pagesHow Do I Choose A Graduate SchoolTalha YousufNo ratings yet
- Recommendation LetterDocument4 pagesRecommendation LetterTalha YousufNo ratings yet
- List of Agreed Restaurants PDFDocument7 pagesList of Agreed Restaurants PDFTalha YousufNo ratings yet
- Course Code Credit Hours Courses DescriptionDocument2 pagesCourse Code Credit Hours Courses DescriptionTalha YousufNo ratings yet
- Lec 1Document10 pagesLec 1Talha YousufNo ratings yet
- Literature ReviewDocument11 pagesLiterature ReviewTalha YousufNo ratings yet
- Sample Email & Reference LetterDocument2 pagesSample Email & Reference LetterTalha YousufNo ratings yet
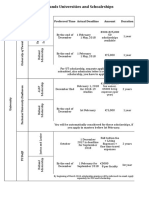
- Netherlands Universities and Schoalrships: Preferred Time Actual Deadline Amount DurationDocument1 pageNetherlands Universities and Schoalrships: Preferred Time Actual Deadline Amount DurationTalha YousufNo ratings yet
- Top 101 High Frequency GRE Words - CrunchPrep GREDocument12 pagesTop 101 High Frequency GRE Words - CrunchPrep GRETalha Yousuf100% (2)
- Official Translators, Updated 15-July-2015Document2 pagesOfficial Translators, Updated 15-July-2015Talha YousufNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Soal-Soal Kel 4Document4 pagesSoal-Soal Kel 4Sayyidati ZuhrohNo ratings yet
- Linear Algebra - How Does The Homogenization of A Curve Using A Given Line Work - Mathematics Stack ExchangeDocument4 pagesLinear Algebra - How Does The Homogenization of A Curve Using A Given Line Work - Mathematics Stack ExchangePranavi AnchaNo ratings yet
- Physics 251a - Advanced Quantum Mechanics IDocument83 pagesPhysics 251a - Advanced Quantum Mechanics IspeareeD :3No ratings yet
- 2D TransformationsDocument4 pages2D TransformationsAdisesha KandipatiNo ratings yet
- 38 - The Classical Electromagnetic Field Hamiltonian PDFDocument29 pages38 - The Classical Electromagnetic Field Hamiltonian PDFUltrazordNo ratings yet
- Ch10-Faraday's Law of InductionDocument32 pagesCh10-Faraday's Law of Inductionmehdii.heidary1366100% (3)
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocument23 pagesLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNo ratings yet
- Ordered Complexity From Dissipative and Chaotic Systems, Including The Human Brain and Society and The Universe Relevance of The Second Law of ThermodynamicsDocument4 pagesOrdered Complexity From Dissipative and Chaotic Systems, Including The Human Brain and Society and The Universe Relevance of The Second Law of ThermodynamicsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Multiple View Geometry: Exercise Sheet 7Document2 pagesMultiple View Geometry: Exercise Sheet 7Berkay ÖzerbayNo ratings yet
- Vector FieldsDocument132 pagesVector FieldsJean claude onana100% (1)
- PT Symmetry: Carl Bender Physics Department Washington UniversityDocument53 pagesPT Symmetry: Carl Bender Physics Department Washington UniversityMargaret KittyNo ratings yet
- The Unified Field of ConsciousnessDocument18 pagesThe Unified Field of ConsciousnessGianna Barcelli FantappieNo ratings yet
- Mat223 UTM Midterm UofTDocument7 pagesMat223 UTM Midterm UofTRevownSada100% (1)
- Part 7 Mean Field TheoryDocument40 pagesPart 7 Mean Field TheoryOmegaUserNo ratings yet
- Eigenvalues and Eigenvect.9241785.PowerpointDocument5 pagesEigenvalues and Eigenvect.9241785.PowerpointCHEJERLA PRAVALLIKA 21AD010No ratings yet
- PH8253 r17 Physics For Electronics Engineering PDFDocument2 pagesPH8253 r17 Physics For Electronics Engineering PDFLordwin CecilNo ratings yet
- FEM5 Beam ElementDocument33 pagesFEM5 Beam ElementbiboNo ratings yet
- 2 Amador, Ruselle John 4 de La Cruz, Jonathan Audric 3 Selda, Ron Russell 1Document3 pages2 Amador, Ruselle John 4 de La Cruz, Jonathan Audric 3 Selda, Ron Russell 1Aldrin JustadoNo ratings yet
- Stine Marie Berge - PHDDocument147 pagesStine Marie Berge - PHDbajkiszonNo ratings yet
- Stargatebook022814 LibreDocument280 pagesStargatebook022814 LibreNoDualNo ratings yet
- HEC Pakistan Syllabus For B.S. & M.S.physics 2005Document75 pagesHEC Pakistan Syllabus For B.S. & M.S.physics 2005Jehan Zaib Ali Khan100% (2)
- Chapter-1, DFT and FFT, Z-TransformDocument64 pagesChapter-1, DFT and FFT, Z-Transformwendye13No ratings yet
- Energy Within Environmental Constraints: Course A System Few of Comm Int To EngineerDocument2 pagesEnergy Within Environmental Constraints: Course A System Few of Comm Int To EngineerSushant SharmaNo ratings yet
- 9 Laplace Transformation 2017Document48 pages9 Laplace Transformation 2017TaanzNo ratings yet
- MAT223 Solved Problems On Eigenvalues, Eigenvectors, and Diagonalization PDFDocument3 pagesMAT223 Solved Problems On Eigenvalues, Eigenvectors, and Diagonalization PDFJamesYan100% (3)
- Math F111Document2 pagesMath F111Anshik BansalNo ratings yet
- Report - On The Identification of A VortexDocument7 pagesReport - On The Identification of A VortexPiyush JagasiaNo ratings yet
- Gird Systems Intro To Music EspritDocument25 pagesGird Systems Intro To Music EspritppengNo ratings yet
- Linear Analysis: MATH10082Document4 pagesLinear Analysis: MATH10082Loh Jun XianNo ratings yet
- Module Outline (SPHA031) Quantum Mechanics: School of Physical and Mineral Sciences Department of PhysicsDocument57 pagesModule Outline (SPHA031) Quantum Mechanics: School of Physical and Mineral Sciences Department of PhysicsNtokozo MasemulaNo ratings yet