You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Routing in Mobile Ad-Hoc NetworksDocument89 pagesRouting in Mobile Ad-Hoc NetworksMona AliNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Computer Networks: Spring 2012 Instructor: Yuan XueDocument8 pagesComputer Networks: Spring 2012 Instructor: Yuan XueMona AliNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Application: A Smart Traffic Light ControllerDocument8 pagesApplication: A Smart Traffic Light ControllerMona AliNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- All About S CadaDocument48 pagesAll About S CadaAl-Usmanu UsmanNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Communication Networks: Recitation 3 Bridges & Spanning TreesDocument27 pagesCommunication Networks: Recitation 3 Bridges & Spanning TreesderejeNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Data Encoding Using CommunicationDocument53 pagesData Encoding Using Communicationdeepak_abcNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- EthernetDocument36 pagesEthernetAlb AlbNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- PLC TutorialDocument48 pagesPLC Tutorialaaaguilar90% (10)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Flow ControlDocument59 pagesFlow ControlMona Ali100% (1)
- Data Encoding Using CommunicationDocument53 pagesData Encoding Using Communicationdeepak_abcNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Control System: An IntroductionDocument21 pagesControl System: An IntroductionMelina Andrea ZiccorNo ratings yet
- Class 8Document26 pagesClass 8Mona AliNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Examples NLDocument16 pagesExamples NLMona AliNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Delay ChartsDocument9 pagesDelay ChartsMona Ali100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Package SwitchingDocument16 pagesPackage SwitchingKartik SharmaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Computer Networks: Spring 2012 Instructor: Yuan XueDocument8 pagesComputer Networks: Spring 2012 Instructor: Yuan XueMona AliNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Basics of Int Signal - Lec3Document46 pagesBasics of Int Signal - Lec3Mona AliNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Describing FunctionsDocument21 pagesDescribing FunctionsMona Ali100% (1)
- IELTS Writing Samples PDFDocument22 pagesIELTS Writing Samples PDFAndreea SennyNo ratings yet
- Routing in Mobile Ad-Hoc NetworksDocument89 pagesRouting in Mobile Ad-Hoc NetworksMona AliNo ratings yet
- Common Nonlinearities and Describing FunctionsDocument16 pagesCommon Nonlinearities and Describing FunctionsMona AliNo ratings yet
- Chapter 5-Network LayerDocument7 pagesChapter 5-Network LayerMona AliNo ratings yet
- Barret 03Document11 pagesBarret 03Mona AliNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Network Fundamentals: Abdelkhalik Elsaid MosaDocument31 pagesNetwork Fundamentals: Abdelkhalik Elsaid MosaMona AliNo ratings yet
- Network Fundamentals: Abdelkhalik Elsaid MosaDocument27 pagesNetwork Fundamentals: Abdelkhalik Elsaid MosaMona AliNo ratings yet
- The OSI Model: Understanding The Seven Layers of Computer NetworksDocument22 pagesThe OSI Model: Understanding The Seven Layers of Computer NetworksMona AliNo ratings yet
- 6-Smart Traffic ControlDocument4 pages6-Smart Traffic ControlrabbvargeyaarNo ratings yet
- OptimDocument23 pagesOptimMona AliNo ratings yet
- Basics of Int Signal - Lec3Document46 pagesBasics of Int Signal - Lec3Mona AliNo ratings yet
- What Is Human Behavior?Document6 pagesWhat Is Human Behavior?Liza FloresNo ratings yet
- Learn What Narrative Therapy Is and How This Technique Can Help YouDocument2 pagesLearn What Narrative Therapy Is and How This Technique Can Help YouPavi ArulNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Presentasi Minggu 7Document128 pagesPresentasi Minggu 7Puput AjaNo ratings yet
- How Do I Motivate My Students White PaperDocument5 pagesHow Do I Motivate My Students White PapermirfanaminNo ratings yet
- Introduction To PsychologyDocument77 pagesIntroduction To PsychologyKhawaja Abdul RahmanNo ratings yet
- Identitatea Europeana Spatiul AdevaratDocument323 pagesIdentitatea Europeana Spatiul AdevaratCristian ChiruNo ratings yet
- Major Perspectives in Leadership TheoryDocument19 pagesMajor Perspectives in Leadership TheoryAnoosha LashariNo ratings yet
- Individual Behavior and Organizational PerformanceDocument18 pagesIndividual Behavior and Organizational PerformanceATi HannNo ratings yet
- (SUMMARY) Perilaku Keorganisasian (Chapter 9)Document6 pages(SUMMARY) Perilaku Keorganisasian (Chapter 9)taqi taqaNo ratings yet
- Attitude PerceptionDocument77 pagesAttitude PerceptionbharticNo ratings yet
- Cartesian DualismDocument5 pagesCartesian DualismMitRomneyNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Core Values of Social WorkDocument12 pagesCore Values of Social WorkthepathfinderformercuryNo ratings yet
- Fundamentals of International NegotiationDocument17 pagesFundamentals of International NegotiationHasan ZidnyNo ratings yet
- Topic 7 - Hunt For Reengineering OpportunitiesDocument22 pagesTopic 7 - Hunt For Reengineering OpportunitiesLucky Parashar100% (1)
- The Bar-On Model of Emotional-Social Intelligence 2006Document13 pagesThe Bar-On Model of Emotional-Social Intelligence 2006Maria IrinaNo ratings yet
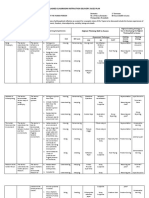
- Aligned Classroom Instruction Delivery (Acid) Plan: KUD RBT Level Enabling General Strategy Teaching Strategy WW QA PC/PTDocument5 pagesAligned Classroom Instruction Delivery (Acid) Plan: KUD RBT Level Enabling General Strategy Teaching Strategy WW QA PC/PTGilmarie Arbon RomitaresNo ratings yet
- What Is Knowledge ManagementDocument6 pagesWhat Is Knowledge ManagementDwi AniNo ratings yet
- Notes For Habit 5Document2 pagesNotes For Habit 5eieipayadNo ratings yet
- Ekman 1992 CognitionEmotion PDFDocument17 pagesEkman 1992 CognitionEmotion PDFgeny katerine gonzales castanoNo ratings yet
- The Mind-Body ProblemDocument7 pagesThe Mind-Body Problemapi-663496842No ratings yet
- University of Florida Libraries ebook examines modes of experienceDocument376 pagesUniversity of Florida Libraries ebook examines modes of experienceTiago Avila100% (1)
- Change Management or LeadershipDocument13 pagesChange Management or Leadershipnmmng2011100% (2)
- Nursing Philosopy Pak KumboDocument18 pagesNursing Philosopy Pak KumboMoh. Ubaidillah FaqihNo ratings yet
- Of Wealth and Death Materialism Mortality SalienceDocument5 pagesOf Wealth and Death Materialism Mortality SalienceRahmatNo ratings yet
- Adaptive Controller Example 101 PDFDocument5 pagesAdaptive Controller Example 101 PDFMUHAMMAD USMAN KhalidNo ratings yet
- Organizational Behavior: Chapter 4: Personality and ValuesDocument32 pagesOrganizational Behavior: Chapter 4: Personality and ValueshiigeeNo ratings yet
- 2005 Rosnow FosterDocument4 pages2005 Rosnow FosterSheena May Ceneta OmipleNo ratings yet
- John Kotter 8 Step ModelDocument14 pagesJohn Kotter 8 Step Modelmushtaq2006100% (3)
- General Psychology Chapter 13 OutlineDocument25 pagesGeneral Psychology Chapter 13 OutlineSydney Grulloń-MatosNo ratings yet
- Noise Orders Jazz, Improvisation, and Architecture - David P. Brown PDFDocument193 pagesNoise Orders Jazz, Improvisation, and Architecture - David P. Brown PDFDaniela VillegasNo ratings yet