You might also like
- ETQ1Document2 pagesETQ1Yesenia Gonzalez OrtegaNo ratings yet
- Portada ManualDocument4 pagesPortada ManualYesenia Gonzalez OrtegaNo ratings yet
- Articulo 3Document28 pagesArticulo 3Yesenia Gonzalez OrtegaNo ratings yet
- Diagramas ComposicionDocument11 pagesDiagramas ComposicionYesenia Gonzalez OrtegaNo ratings yet
- Mapa ConceptualDocument1 pageMapa ConceptualYesenia Gonzalez OrtegaNo ratings yet
- Mejora en El Control de Cascada para Reactores Tubulares PDFDocument10 pagesMejora en El Control de Cascada para Reactores Tubulares PDFYesenia Gonzalez OrtegaNo ratings yet
- Punto Burbuja 3Document2 pagesPunto Burbuja 3Yesenia Gonzalez OrtegaNo ratings yet
- Chart TitleDocument2 pagesChart TitleYesenia Gonzalez OrtegaNo ratings yet
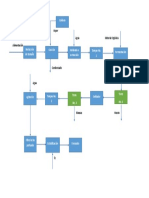
- Diagram As Equipo S ProcesoDocument1 pageDiagram As Equipo S ProcesoYesenia Gonzalez OrtegaNo ratings yet
- Problemas Extraccion Primera ParteDocument2 pagesProblemas Extraccion Primera ParteNikoleAjila0% (1)
- Curso de Aspen Plus PDFDocument23 pagesCurso de Aspen Plus PDFYesenia Gonzalez Ortega100% (1)
- 10 Técnicas de Estudio para Mejorar El AprendizajeDocument6 pages10 Técnicas de Estudio para Mejorar El AprendizajeYesenia Gonzalez OrtegaNo ratings yet
- Libro Taller 3 Evaluación de Proyectos PDFDocument196 pagesLibro Taller 3 Evaluación de Proyectos PDFTommy BautistaNo ratings yet
- 7 23Document1 page7 23Yesenia Gonzalez OrtegaNo ratings yet
- Inicio ProtDocument13 pagesInicio ProtYesenia Gonzalez OrtegaNo ratings yet
- Bloques 2Document1 pageBloques 2Yesenia Gonzalez OrtegaNo ratings yet
- Lixiviación Líquido Sólido 2011Document17 pagesLixiviación Líquido Sólido 2011Alejo Arango CorreaNo ratings yet
- Marcilla Gomis A. 1999 (I) - Introducción A Las Operaciones de Separación Contacto ContinuoDocument391 pagesMarcilla Gomis A. 1999 (I) - Introducción A Las Operaciones de Separación Contacto Continuomonzon.bescos100% (1)
- Apuntes Del Van PDFDocument90 pagesApuntes Del Van PDFRamos Yovera Jimmy OrlandoNo ratings yet
- Bloques 1Document1 pageBloques 1Yesenia Gonzalez OrtegaNo ratings yet
- Metodo JacobianoDocument1 pageMetodo JacobianoYesenia Gonzalez OrtegaNo ratings yet
- CALIZADocument82 pagesCALIZAChavez PaolaNo ratings yet
- 19NL2011UD083Document107 pages19NL2011UD083Yesenia Gonzalez OrtegaNo ratings yet
- Flujo de Potencia A Través de Una Línea de TransmisiónDocument8 pagesFlujo de Potencia A Través de Una Línea de TransmisiónManuelhilario Bravo HuertaNo ratings yet
- Máquinas HidráulicasDocument12 pagesMáquinas HidráulicasjhanarizaNo ratings yet
- PM115 001 Elementos Del LenguajeDocument97 pagesPM115 001 Elementos Del LenguajeAlejandroPortuguezTapiaNo ratings yet
- TEMA 3 AN ComputacionalDocument6 pagesTEMA 3 AN ComputacionalFer CibeauNo ratings yet
- Unidad 4 Modelo de Fl. en Re.Document24 pagesUnidad 4 Modelo de Fl. en Re.Mayo Diaz NicolasaNo ratings yet
- Monomios y PolinomiosDocument4 pagesMonomios y PolinomiosMichael Collatupa RiveraNo ratings yet
- Análisis numérico con métodos para aproximar seriesDocument26 pagesAnálisis numérico con métodos para aproximar seriesRasta Live Jash /B.D.C.G/No ratings yet
- Capitulo 2 Sistemas Digitales TocciDocument4 pagesCapitulo 2 Sistemas Digitales TocciYeudy MojicaNo ratings yet
- Linea de EsperaDocument14 pagesLinea de EsperanerihungriaNo ratings yet
- Criptografía: Conceptos claveDocument9 pagesCriptografía: Conceptos claveMiguel KzNo ratings yet
- Clasificación de EDP Lineales de 2do Orden Con Coeficientes ConstantesDocument27 pagesClasificación de EDP Lineales de 2do Orden Con Coeficientes ConstantesCaro Villa MoraNo ratings yet
- Practica N°1 LabDocument17 pagesPractica N°1 LabGorena CaritoNo ratings yet
- Modelo EOQ g2Document3 pagesModelo EOQ g2Juan Pablo Penagos LosadaNo ratings yet
- TC1 Tema 2 - p62 - 2023 05 06Document17 pagesTC1 Tema 2 - p62 - 2023 05 06JuanNo ratings yet
- 2021 - TALLER PLE Tema ADocument2 pages2021 - TALLER PLE Tema AricardoNo ratings yet
- Paso 3Document5 pagesPaso 3AndresAmayaNo ratings yet
- AdaBoost For Feature Selection - Presentacion Lucas LangwagenDocument20 pagesAdaBoost For Feature Selection - Presentacion Lucas Langwagennoe lopezNo ratings yet
- Apuntes 1 Calculos MultivariablesDocument38 pagesApuntes 1 Calculos MultivariablesCAMILA ALEJANDRA MONTOYA CHACONNo ratings yet
- Tarea 5 Estadistica 2Document4 pagesTarea 5 Estadistica 2alberto corporan de la rosa100% (1)
- Fiqui 3 y 4Document7 pagesFiqui 3 y 4BrayanNo ratings yet
- Simulación de Control de PosiciónDocument25 pagesSimulación de Control de PosiciónaracfenixNo ratings yet
- Trabajo Práctico 7 Derivación NuméricaDocument2 pagesTrabajo Práctico 7 Derivación NuméricaAndres RaggiNo ratings yet
- Modelo de simulación con dinámica de sistemasDocument21 pagesModelo de simulación con dinámica de sistemasCAMILA PUENTES CORDOBANo ratings yet
- Regla Simpson 1/3 C++Document10 pagesRegla Simpson 1/3 C++lachv346@hotmail.com100% (4)
- Distribución ErlangDocument15 pagesDistribución ErlangCintia FeriaNo ratings yet
- Simulación de Sistemas - Generación de números aleatorios y pruebas de uniformidad e independenciaDocument2 pagesSimulación de Sistemas - Generación de números aleatorios y pruebas de uniformidad e independenciaeddy_maxNo ratings yet
- Foro 02 Analisis EstructuralDocument8 pagesForo 02 Analisis Estructuraljosafe sanchez fernandezNo ratings yet
- Capitulo 3 La Funcion de Transferencia (Comprimido)Document27 pagesCapitulo 3 La Funcion de Transferencia (Comprimido)Juan ApazaNo ratings yet
- Programación lineal: modelo, formulación, función objetivo y restriccionesDocument12 pagesProgramación lineal: modelo, formulación, función objetivo y restriccionesEdwin ContrerasNo ratings yet