You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Counter 19 Service ManualDocument101 pagesCounter 19 Service ManualDuvan Gomez CardonaNo ratings yet
- Neural Machine Translation Advised by Statistical Machine TranslationDocument7 pagesNeural Machine Translation Advised by Statistical Machine TranslationxribeneNo ratings yet
- Improved LassoDocument4 pagesImproved LassoxribeneNo ratings yet
- Applying To Grad SchoolDocument14 pagesApplying To Grad SchoolxribeneNo ratings yet
- Learning Agreement Entrants 2016Document5 pagesLearning Agreement Entrants 2016xribeneNo ratings yet
- Lecture11 PDFDocument30 pagesLecture11 PDFxribeneNo ratings yet
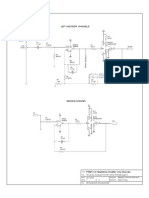
- Left and Right ChannelsDocument2 pagesLeft and Right ChannelsxribeneNo ratings yet
- WXG99BX 03Document1 pageWXG99BX 03xribeneNo ratings yet
- Explicit Image Detection Using Ycbcr Space Color Model As Skin DetectionDocument6 pagesExplicit Image Detection Using Ycbcr Space Color Model As Skin DetectionxribeneNo ratings yet
- Air On A G String: Js Bach Arr SjnixonDocument1 pageAir On A G String: Js Bach Arr SjnixonxribeneNo ratings yet
- Invierno Guitar 2Document2 pagesInvierno Guitar 2xribeneNo ratings yet
- 1-Via and SMask Design Guide4Document2 pages1-Via and SMask Design Guide4Екатерина КорнееваNo ratings yet
- IIR Filter Design With MATLABDocument13 pagesIIR Filter Design With MATLABseemabNo ratings yet
- Nyy 1CDocument1 pageNyy 1Chenry_gtNo ratings yet
- Single-Phase SSR With Detachable Heatsink: SR1 SeriesDocument2 pagesSingle-Phase SSR With Detachable Heatsink: SR1 Seriestechnical supportNo ratings yet
- Uputstvo Za Laptop ASUS K53EDocument110 pagesUputstvo Za Laptop ASUS K53EPedja VukovicNo ratings yet
- ABB Motor Excitation Flyer LowresDocument2 pagesABB Motor Excitation Flyer LowresGavinsiau100% (1)
- Opal Generator Annunciator - Turbine V1 - Rev CDocument35 pagesOpal Generator Annunciator - Turbine V1 - Rev CRaj ChavanNo ratings yet
- A1800 Meter Installation Instructions PDFDocument12 pagesA1800 Meter Installation Instructions PDFandresNo ratings yet
- ACI Hardware Install GuideDocument28 pagesACI Hardware Install GuideGopi ChowdaryNo ratings yet
- T2000 Data SheetDocument6 pagesT2000 Data SheetRifaiNo ratings yet
- Analysis of Silicon Solar Cell Device PaDocument9 pagesAnalysis of Silicon Solar Cell Device PaHoucine NaimNo ratings yet
- Treadles (EU)Document1 pageTreadles (EU)Haris AhmadNo ratings yet
- (Elec) Generator Excitation SystemDocument51 pages(Elec) Generator Excitation SystemThanh Son100% (1)
- Spice Parameter CalculatorDocument14 pagesSpice Parameter Calculatorhamid_kh_56No ratings yet
- ONS Sample Question PaperDocument4 pagesONS Sample Question PaperRaashidNo ratings yet
- Battery Catalogue 2014Document84 pagesBattery Catalogue 2014Chiranjivi Kuthumi100% (1)
- 50 TOP POWER ELECTRONICS Interview Questions and Answers PDF POWER ELECTRONICS Interview Questions PDFDocument10 pages50 TOP POWER ELECTRONICS Interview Questions and Answers PDF POWER ELECTRONICS Interview Questions PDFSIVAKAMINo ratings yet
- Valtra T190 Ecu - 221006 - 074310Document3 pagesValtra T190 Ecu - 221006 - 074310Andres PulkNo ratings yet
- Ap326310 Tc1765bootstraploader v1.0 2002 03Document32 pagesAp326310 Tc1765bootstraploader v1.0 2002 03Poon Electronic Training CentreNo ratings yet
- خطوات عمل جداول الحسابات Panel SchedulesDocument6 pagesخطوات عمل جداول الحسابات Panel SchedulesMOAZ ASHRAFNo ratings yet
- Leader CS Lab 2 ReportDocument24 pagesLeader CS Lab 2 ReportEinstine PcNo ratings yet
- 180.5Mbps-8Gbps DLL-based Clock and Data Recovery Circuit With Low Jitter PerformanceDocument4 pages180.5Mbps-8Gbps DLL-based Clock and Data Recovery Circuit With Low Jitter PerformanceMinh KhangNo ratings yet
- Tle 8 DahliaDocument6 pagesTle 8 DahliaRomualdo TubarNo ratings yet
- Instrument Transformer Fuses Types WBP and BRT: Catalogue B12/06/01/EDocument8 pagesInstrument Transformer Fuses Types WBP and BRT: Catalogue B12/06/01/EivanramljakNo ratings yet
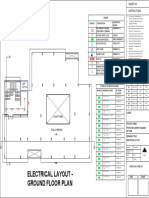
- Electrical Layout - Ground Floor Plan: Sheet No. InstructionsDocument1 pageElectrical Layout - Ground Floor Plan: Sheet No. InstructionsAbhishek AjayNo ratings yet
- X20CP04xx-en V2.21Document18 pagesX20CP04xx-en V2.21PREVENCIONISTA HUAQUIANNo ratings yet
- Saniflo Sanitop Installation GuideDocument9 pagesSaniflo Sanitop Installation GuideSmoKingBuds HD (SKB)No ratings yet
- MAIN (5) MAIN (1) MAIN (2) Function (5) : Block DiagramDocument1 pageMAIN (5) MAIN (1) MAIN (2) Function (5) : Block DiagramCarlos GonçalvesNo ratings yet
- Renesola Virtus Poly SpecsDocument2 pagesRenesola Virtus Poly SpecsPepe PintoNo ratings yet