You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SAT PhysicsDocument25 pagesSAT PhysicsEric D'SouzaNo ratings yet
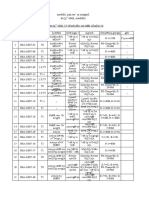
- Nwemä Cjøx We' Yr MWGWZ KV Q 'Vmä, Nwemä - Welqt KV Q 'Vmä 33 KWF JVBB Cwi'K©B Cöwz E'BDocument8 pagesNwemä Cjøx We' Yr MWGWZ KV Q 'Vmä, Nwemä - Welqt KV Q 'Vmä 33 KWF JVBB Cwi'K©B Cöwz E'Bআশিক পালোয়ানNo ratings yet
- Alarm Tag ListDocument15 pagesAlarm Tag Listআশিক পালোয়ানNo ratings yet
- Alarm Set Point ListDocument9 pagesAlarm Set Point Listআশিক পালোয়ানNo ratings yet
- Gas Turbine Combustion ChamberDocument22 pagesGas Turbine Combustion ChamberChoiruel MunaNo ratings yet
- AgmDocument1 pageAgmআশিক পালোয়ানNo ratings yet
- Mshyw T 1 - ÷wks KxuDocument2 pagesMshyw T 1 - ÷wks Kxuআশিক পালোয়ানNo ratings yet
- 33kv Row NoteDocument1 page33kv Row Noteআশিক পালোয়ানNo ratings yet
- Post: Sr. ADM (B.Sc. in EEE) : Summit Power LTDDocument1 pagePost: Sr. ADM (B.Sc. in EEE) : Summit Power LTDKhalid MahmudNo ratings yet
- BTCL 17Document3 pagesBTCL 17Amit HasanNo ratings yet
- Breb Ae PDFDocument2 pagesBreb Ae PDFআশিক পালোয়ানNo ratings yet
- Viva Voce in Electrical Engineering PDFDocument166 pagesViva Voce in Electrical Engineering PDFআশিক পালোয়ানNo ratings yet
- (Final) Engineers-Cafe-MEEEE PDFDocument8 pages(Final) Engineers-Cafe-MEEEE PDFআশিক পালোয়ানNo ratings yet
- Analytical Math QuestionDocument3 pagesAnalytical Math Questionবাবলু চাকমাNo ratings yet
- Summit Power Recruitment Test 27-05-2015 Question by Rony ParvejDocument1 pageSummit Power Recruitment Test 27-05-2015 Question by Rony ParvejEngr. Shahidul Islam100% (1)
- ch06 PDFDocument58 pagesch06 PDFAziz OctaviantoNo ratings yet
- Recruitment Test Question of Agrani Bank (EEE)Document1 pageRecruitment Test Question of Agrani Bank (EEE)shawon_darkNo ratings yet
- Multiplexer Frame - SDH SonetDocument63 pagesMultiplexer Frame - SDH SonetRoss Sonny CruzNo ratings yet
- BPDB QUS - 20july 2018 Andd PDFDocument6 pagesBPDB QUS - 20july 2018 Andd PDFআশিক পালোয়ানNo ratings yet
- BTCL 17Document3 pagesBTCL 17Amit HasanNo ratings yet
- Bangladesh Bank (AD, EEE, 2013) Recruitment Test Question PDFDocument2 pagesBangladesh Bank (AD, EEE, 2013) Recruitment Test Question PDFekjon1100% (1)
- Desh Energy (12-04-2018) PDFDocument2 pagesDesh Energy (12-04-2018) PDFআশিক পালোয়ানNo ratings yet
- PGCB 2015Document4 pagesPGCB 2015আশিক পালোয়ানNo ratings yet
- Bangladesh Power Sector Overview-2017 PDFDocument16 pagesBangladesh Power Sector Overview-2017 PDFEhsan OheeNo ratings yet
- Malvino MCQ in Power AmplifiersDocument7 pagesMalvino MCQ in Power Amplifiersআশিক পালোয়ানNo ratings yet
- Find Ic & V: PGCB-2014 BuetDocument5 pagesFind Ic & V: PGCB-2014 Buetআশিক পালোয়ানNo ratings yet
- Asst. Maintenance Engr. BD - Bank - ANIS PDFDocument1 pageAsst. Maintenance Engr. BD - Bank - ANIS PDFআশিক পালোয়ানNo ratings yet
- Bangladesh Bank Question - AD - ANISDocument2 pagesBangladesh Bank Question - AD - ANISekjon1100% (3)
- Asst. Maintenance Engr. BD - Bank - ANIS PDFDocument1 pageAsst. Maintenance Engr. BD - Bank - ANIS PDFআশিক পালোয়ানNo ratings yet
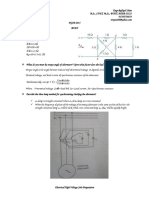
- 03 DynamicsDocument11 pages03 DynamicsShonar KellaNo ratings yet
- Admittance Matrix: PPT Submitted by RC - 1308 - 792, RIT, Berhampur Is Licensed Under TheDocument17 pagesAdmittance Matrix: PPT Submitted by RC - 1308 - 792, RIT, Berhampur Is Licensed Under Theআশিক পালোয়ানNo ratings yet
- Chemical Bonding Notes For ExamDocument4 pagesChemical Bonding Notes For ExamMermz96No ratings yet
- Electrostatics: OpposesDocument5 pagesElectrostatics: OpposessgohbNo ratings yet
- ThermalDocument9 pagesThermalMuhammadNo ratings yet
- ALA 1 Chapter 9 - Fluid DynamicsDocument9 pagesALA 1 Chapter 9 - Fluid Dynamicsphoenix eastwoodNo ratings yet
- J Jenvrad 2016 04 008 PDFDocument5 pagesJ Jenvrad 2016 04 008 PDFNguyễnKhươngDuyNo ratings yet
- Physics equations sheet: W=mg W=Fs F=ke s=vt a = Δ v t F=ma p=mv Ek = 1 m v 2 Ep=mgh P = E T P = W tDocument2 pagesPhysics equations sheet: W=mg W=Fs F=ke s=vt a = Δ v t F=ma p=mv Ek = 1 m v 2 Ep=mgh P = E T P = W tUtkarsh IngleNo ratings yet
- Calculating WeightDocument1 pageCalculating WeightMăndița BaiasNo ratings yet
- Alternating Current Circuits and Electromagnetic WavesDocument65 pagesAlternating Current Circuits and Electromagnetic WavesMaulitaNo ratings yet
- Capitulo 4 WhiteDocument62 pagesCapitulo 4 Whitegabo2008No ratings yet
- Chemistry Unit 1 Review SheetDocument2 pagesChemistry Unit 1 Review Sheetapi-330460747No ratings yet
- Planck 'S ConstantDocument4 pagesPlanck 'S ConstantgeetishaNo ratings yet
- ACI 350 3 06 Appendix B Seismic Loads For Liquid Containing Rectangular RC Tank Rev01 04 Nov 2014 PDFDocument13 pagesACI 350 3 06 Appendix B Seismic Loads For Liquid Containing Rectangular RC Tank Rev01 04 Nov 2014 PDFLuis Gil MorenoNo ratings yet
- Properties of Relay Contact SystemDocument3 pagesProperties of Relay Contact Systemsaga2000cnNo ratings yet
- Pascal's Law, Bernoulis Theorm - PowerPointToPdfDocument11 pagesPascal's Law, Bernoulis Theorm - PowerPointToPdfRahul YadavNo ratings yet
- Kinematic ChainDocument3 pagesKinematic ChainRanjit RajendranNo ratings yet
- MathesDocument2 pagesMathesk thejeshNo ratings yet
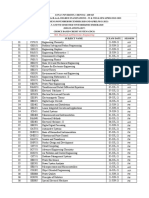
- Semester Subject Subject Name Exam Date Session: B.E. Electrical and Electronics EngineeringDocument2 pagesSemester Subject Subject Name Exam Date Session: B.E. Electrical and Electronics EngineeringBALAKRISHNANNo ratings yet
- Finite Element Analysis Theory and Application With AnsysDocument12 pagesFinite Element Analysis Theory and Application With AnsysAngeloMaggioNetoNo ratings yet
- Advance Test 3Document62 pagesAdvance Test 3sameer aroraNo ratings yet
- Jee Mains Qs1Document11 pagesJee Mains Qs1Ajay KumarNo ratings yet
- PEmag v71 L05 Assorted FeaturesDocument14 pagesPEmag v71 L05 Assorted FeaturesEdwin C. AbregúNo ratings yet
- Pure Substances, Phase-Change Process, Property DiagramsDocument3 pagesPure Substances, Phase-Change Process, Property DiagramsNallely AristaNo ratings yet
- Performance of Deck Ovens: Standard Test Method ForDocument13 pagesPerformance of Deck Ovens: Standard Test Method ForFrancisco GuerraNo ratings yet
- Short Circuit in OHL PDFDocument6 pagesShort Circuit in OHL PDFAHMED YOUSEFNo ratings yet
- Electromagnetic Waves Regions of The EM WavesDocument73 pagesElectromagnetic Waves Regions of The EM WavesJR LubisNo ratings yet
- EI6603 - Industrial - Instrumentation - II - University - QP - Answer - KeyDocument16 pagesEI6603 - Industrial - Instrumentation - II - University - QP - Answer - KeyMadhusudhanan Ramaiah100% (1)
- Heat Loss From A Buried Oil PipeDocument20 pagesHeat Loss From A Buried Oil PipeJuan Pablo ApazaNo ratings yet
- Chemsheets 033 (Particle Theory 1)Document1 pageChemsheets 033 (Particle Theory 1)SaaraNo ratings yet
- Vapor/Liquid Equilibrium: Mata Kuliah: Termodinamika IIDocument70 pagesVapor/Liquid Equilibrium: Mata Kuliah: Termodinamika IIputri wahyuniNo ratings yet